多点分时水质监控系统的管理机站的制作方法
1.本实用新型提供一种多点分时水质监控系统的管理机站,尤指管理机站可操控搭载水质感测模块的无人载具定点往返多个感测点执行各项水质参数数据的采集任务,并于无人载具返回后,可自动完成对无人载具进行充电及水质感测模块清洗作业。
背景技术:
2.现今利用天然海水、养殖池或水族箱放养有用的水族、水产等,包含鱼、虾或水草等水生的动、植物,除了养殖池设备之外,其他诸如养殖池的水质、放养量、放养时间、饵饲量、温度等,皆是影响养殖效果的重要因素,而为了使养殖水产有更佳成长条件,目前养殖池中大多设置有若干水车、自动给饵器、过滤器等养殖用机具,并会使用多种电子化感测装置来获取养殖池中的水质信息,当养殖池水质发生变化时,可实时感测并回报给养殖业者采取相应措施,以避免因水质条件的设定、生态环境不合于水生动物的生长变化而导致死亡。
3.然而,一般养殖池内所放养的生物可能都是来自不同的环境而需要不同的水质条件,其生态构成相当复杂,所以在养殖的过程中,包含水质条件(如溶氧、温度、酸碱度、盐度等)、水体污染程度(如氨氮、悬浮固体、氧化还原电位等)与浮游动、植物等,都是会影响养殖水产能够不生病变与养殖成功的关键,因此维持良好的水质对于水生动物的健康极具重要,常见的作法是监测养殖池内水质的酸碱度(即ph值)与溶氧量(即do值),若水质的酸碱度变化偏离容许值时,便会启动泵浦来进行抽、换水工作,也可投放必要的石灰、腐植酸、益生菌等安定剂来进行消毒、分解池底腐坏的物质及提供藻类养分、调节水质的酸碱度与维持浮游动、植物的密度等,待一段时间后再进行测试,直到酸碱值在容许的范围内为止,而水质的溶氧量不足时,则启动水车进行打水或增氧机来补充水中的溶氧量,以确保养殖池内生态的平衡及续存。
4.传统连续式水质监测系统中每一个不同区域的养殖池皆需要一套水质采集装置来作检测,若是应用于多个不同养殖池时,为了达成统一控管不同的养殖池及可随时监控水质参数(如水温、溶氧量、酸碱度、盐度、氨氮、悬浮固体、氧化还原电位等)的相关数据,则需要具备有多套水质采集装置,不仅建置的费用甚高,并造成养殖业者对采用连续式水质监测系统的意愿很低。
5.如图3所示,现有的多点水质监测系统的方块示意图,其中该多点水质监测系统将水质采集装置a的多个感测模块a1(包含水质传感器与信号处理部分等)分别设置在不同养殖池中,并由信号采集与储存单元a2将通过有线或无线传输采集水质传感器所感测到水体中的水质参数数据进行储存后,再通过互联网上传至后台服务器或云端处理平台b来进行各种监测或控管行为,但是,该多点水质监测系统通常将水质传感器长时间置入于养殖池的水体中,若检测的水体污染程度较高或含有丰富浮游动、植物时,将会造成光学式水质传感器上很容易附着藻类、介壳类生物等,以致使感测信号快速衰减或失真,而电化学式水质传感器也很容易因电极持续的反应而快速老化,必须派遣人员定期往返不同地点的养殖池
频繁进行校正、维修与保养等,对于人力的依赖极高,一旦疏于维护即造成显著的影响,甚而导致系统故障、误判等情事。
6.因此,在养殖池利用自动水质监测控管的时代,因封闭水体中的各项水质参数并不会频繁或剧烈变化,所以业者要如何设计出能够多点分时进行水质监测及控管,并在水质传感器的维护上,可精简人力的水质监控系统,以有效改善多个养殖池在统一控管上的诸多不便与缺失,降低人力维护的成本,且可维持水质的最佳状态,即为此行业者长久以来亟欲改善的重要课题所在。
技术实现要素:
7.本实用新型的主要目的在于水质感测机的无人载具可接收一任务指令,依设定的飞行路线定点往返多个指定的感测点,并于无人载具飞行到指定的感测点后,可通过搭载的水质感测模块执行各项水质参数数据的采集任务,当无人载具返回管理机站的起降台上,主控模块便会控制清洗机来对水质感测模块进行自动清洗,并由充电单元来对无人载具内部安装的动力电池快速进行充电,此种管理机站不但可对所有在线的水质感测机进行管理,包含无人载具升降、实时追踪与记录飞行轨迹及动向等,并于无人载具返回后可自动完成清洗与充电作业,再依设定的飞行路线继续前往下一个感测点执行采集任务,一直到所有任务结束,以精简人力及可降低维护的成本。
8.本实用新型的另一目的在于该管理机站的充电单元还包含一冷却模块,较佳实施为一散热风扇,并由散热风扇直接对水质感测机或动力电池的部位来进行冷却循环送风,以避免动力电池在充电的过程中产生高温造成损耗或充电效能降低,进而延长整体的使用寿命。
9.本实用新型的再一目的在于该管理机站的主控模块为进一步连接有一告警单元,当主控模块侦测到无人载具有异常状况时,告警单元便会对外发出一告警信号,包含警示用的声响、语音、光源或电子信息,以告知现场操作者实时作处理,确保无人载具正常的运作。
10.为达到上述目的,本实用新型提供了一种多点分时水质监控系统的管理机站,其适用于管理至少一台水质感测机,并于该水质感测机的无人载具上搭载有一水质感测模块,且该无人载具接收一任务指令依设定的飞行路线定点往返多个指定的感测点,以供该无人载具飞行到达感测点通过该水质感测模块执行各项水质参数数据的采集任务,其中:
11.该管理机站包含用以提供该无人载具定位的起降台、主控模块、无线传输模块、清洗机及充电单元,该主控模块通过该无线传输模块来管理该水质感测机的运作,并接收水质参数数据,当该无人载具自感测点返回该起降台时,该主控模块自动控制该清洗机来对该水质感测模块进行清洗以及该主控模块自动控制该充电单元对该无人载具上安装的一动力电池进行充电。
12.在本实用新型的一实施例中,该起降台具有一平台释放架,该平台释放架在释放前用以夹持住该无人载具,并由该清洗机与该充电单元对该水质感测机进行清洗与充电动作,而释放时则辅助该无人载具升空。
13.在本实用新型的一实施例中,该清洗机具有供该水质感测模块的感测头伸入于其内的清洗水槽,并于该清洗水槽上连接有一进水管及排水管。
14.在本实用新型的一实施例中,该清洗机的清洗水槽内部设有用以对该水质感测模块的感测头进行清洗动作的电动刷或喷嘴。
15.在本实用新型的一实施例中,该充电单元以有线或无线电力传输的方式对该水质感测机的动力电池进行充电。
16.在本实用新型的一实施例中,该充电单元还包含一冷却模块,用以对该水质感测机的动力电池进行散热。
17.在本实用新型的一实施例中,该冷却模块为一散热风扇。
18.在本实用新型的一实施例中,该主控模块进一步连接有一告警单元,当该主控模块侦测该无人载具有异常的状况时,该告警单元便会对外发出一告警信号,且该告警信号包含警示用的声响、语音、光源或电子信息。
附图说明
19.图1]为本实用新型较佳实施例的方块图。
20.图2]为本实用新型另一较佳实施例管理机站的方块图。
21.图3]为现有的多点水质监测系统的方块示意图。
22.附图标记说明:1
‑
水质感测机;11
‑
无人载具;12
‑
受控模块;13
‑
无线传输模块;14
‑
定位模块;15
‑
水质感测模块;16
‑
动力电池;2
‑
管理机站;21
‑
起降台;22
‑
主控模块;23
‑
无线传输模块;24
‑
清洗机;25
‑
充电单元;251
‑
冷却模块;26
‑
告警单元;3
‑
感测点;a
‑
水质采集装置;a1
‑
感测模块;a2
‑
信号采集与储存单元;b
‑
后台服务器或云端处理平台。
具体实施方式
23.为达成本实用新型上述的目的及功效,本实用新型所采用的技术手段及构造,兹绘图就本实用新型的较佳实施例来详加说明其构造与功能如下。
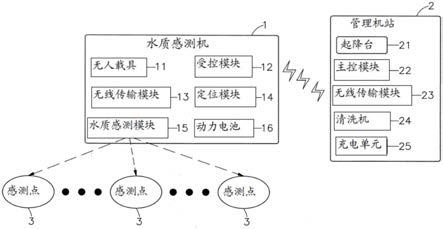
24.请参阅图1所示,本实用新型较佳实施例的方块图,由图中可清楚看出,本实用新型多点分时水质监控系统的管理机站,其适用于管理至少一台水质感测机1,其中:
25.该水质感测机1包含无人载具11、受控模块12、无线传输模块13、定位模块14、水质感测模块15及动力电池16,其中该无人载具11为一无人飞行载具(unmanned aerial vehicle,uav)或无人飞机系统(unmanned aircraft system,uas),亦称为空拍机、遥控无人机等,并于无人载具11的机架上安装有动力装置,且该动力装置主要由桨翼及马达组成,以构成一旋翼机、定翼机及直升旋翼机等机型,便可通过桨翼旋转时产生的反作用力来带动机体飞行。
26.而无人载具11上一般会使用陀螺仪、加速度计、磁力计及气压计等传感器作为回授,并由受控模块12(包含控制器、信号处理单元及储存单元)通过无线传输模块13接收任务指令或控制信号,即可配合定位模块14[包含全球定位系统(global positioning system,gps)或惯性导航系统]来取得无人载具11的姿态、航向或高度等信息,亦可将无人载具11锁定在指定的位置和高度,以进行定位及导航,也可实时追踪与记录无人载具11飞行轨迹及动向,从而具备有姿态稳定和控制、任务设备管理和应急控制功能。
[0027]
在本实施例中,无人载具11于机架下方为搭载有水质感测模块15,该水质感测模块15包含至少一个水质传感器,其分别用以感测包含但不限于水温、水压等物理参数;溶氧
量、酸碱度、盐度、氨氮(nh3
‑
n)、悬浮固体、氧化还原电位等化学参数,或者是其他水质参数的相关数据,亦可为上述各项水质参数中的任意一种或两种以上组合而成的群组,并通过受控模块12将各项水质参数的数据整合后,再由无线传输模块13以3g、4g
‑
lte或5g
‑
nr行动通讯网络回传至管理机站2或后台服务器的数据库进行储存;另,无人载具11于机体内安装有可为锂聚合电池的动力电池16,用以提供整体所需的电力。
[0028]
再者,水质感测机1的受控模块12可通过无线传输模块13取得后台服务器或云端处理平台的管理程序下达的任务指令,自动规划设定的至少两组定点往返的飞行路线,并依管理程序提供的天气信息判定天气状况适合飞行后,所有在线的水质感测机1便会依下达的任务指令自动完成各项采集任务,并快速传输水质感测机1实时的回传影像及水质感测数据等,让现场操作者能够了解水质感测机1任务执行状态,也可实时串流机上的影音、设定飞航区域与核发航权等来操作飞行动作,而后台服务器的管理程序通过应用程序编程接口(api)连接气象局的开放数据平台取得各区的天气信息,包含降雨量、风速等,并可依实时的天气状况来规划及修正最新的飞行路线。
[0029]
此外,无人载具11的机架前头位置亦可搭载有摄像模块,并将拍摄的影像及定位模块14的gps坐标影像通过无线传输模块13实时的回传至后台服务器,让现场操作者可通过屏幕上的影像来监控当前任务执行状态及设定飞行路线,但是,此部分有关受控模块12如何通过无线传输模块13接收任务指令,并配合定位模块14使无人载具11可依设定的飞行路线自动完成各项任务,以及水质感测模块15采集水体的方式为现有技术的范畴,且该细部的构成并非本案的创设要点,故在本案以下的说明书内容中皆一起进行说明,合予陈明。
[0030]
该管理机站2包含起降台21、主控模块22、无线传输模块23、清洗机24及充电单元25,其中该管理机站2可为一固定式或移动式的基地站,并于起降台21上设置有平台释放架,使主控模块22得以控制平台释放架在释放前能稳固夹持住无人载具11,而释放时则能辅助无人载具11顺利升空,但并不以此为限,也可实时追踪与记录无人载具11飞行轨迹及动向等。
[0031]
在本实施例中,清洗机24为具有清洗水槽,并于清洗水槽上连接有进水管及排水管,且清洗水槽内部设有电动刷或喷嘴,当水质感测机1定位在起降台21上时,其水质感测模块15的感测头便会伸入于清洗水槽中,并由电动刷或喷嘴来对每一个感测头进行清(刷)洗的动作,再将清洗过后的水或清洗液通过排水管排出,从而实现自动清(刷)洗、进水、排水、加药(如清洁剂)的功能。
[0032]
而充电单元25对起降台21上夹持的水质感测机1进行电力补充时,以有线或无线电力传输的方式来对动力电池16进行充电,并于充电一段预设时间后就会自动断电,使水质感测机1有足够的电力往返管理机站2,且不会受到距离和飞行时间的限制。
[0033]
当本实用新型于使用时,上述水质感测机1的受控模块12可通过无线传输模块13取得后台服务器或云端处理平台的管理程序所下达的任务指令,使无人载具11配合定位模块14可依自动规划设定的至少两组飞行路线定点往返感测点3,并由管理机站2的起降台21顺利的起飞后,便可自动飞行到达指定的感测点3执行各项采集任务,且该感测点4较佳实施可为一养殖池或鱼塭,但并不以此为限,亦可为一自然水域(如河川、湖泊等)或人工水体(如埤塘、拦河堰、水库等),也可在每一个感测点3处设置有一定位标记,以作为无人载具11的防呆定位使用。
[0034]
当无人载具11飞行到达指定的感测点3中的水面上方时,其收放机构便会带动水质感测模块15向下旋摆,即可改变水质传感器的感测头方向及角度,或者是可将无人载具11通过内部浮力舱或加装浮动套件直接停泊在水面上后,使水质传感器的感测头可伸入至水面下进行采集水体中的各项水质参数数据,并通过受控模块12来将各项水质参数数据整合后,再由无线传输模块13、23实时的回传至管理机站2的主控模块22或后台服务器进行储存,以供后台服务器或云端处理平台进行各种的监测或控管行为等,且可机动变换多个不同的感测点3,让现场操作者可使用单一水质感测机1来监控多个感测点3,进而达到环境广域多点分时监控的目的,也不须在不同需要监控的水体中设置多套水质采集装置,更能够有效地降低建置的成本。
[0035]
而无人载具11返回管理机站2,并降落至起降台21上以平台释放架稳固夹持住后,主控模块22便会自动控制清洗机24来对水质感测模块15上的各个感测头进行清洗,以及充电单元25来对动力电池16进行快速充电,并于无人载具11完成清洗与补充电力后,再依设定的飞行路线继续前往下一个感测点3进行水质参数数据的采集任务,如此反复动作直到所有任务结束,但于实际应用时,并不以此为限,亦可依动力电池16所能提供的飞行距离和时间完成一个以上的任务后,再返回管理机站2进行清洗与补充电力的作业,且可通过主控模块22实时追踪与记录无人载具11飞行轨迹及动向,以便后台服务器或云端处理平台规划下一趟的飞行路线,并在水质感测模块15的维护上,也可通过清洗机24自动进行清洗,以精简人力及可降低维护的成本。
[0036]
请搭配参阅图2所示,本实用新型另一较佳实施例管理机站的方块图,由图中可清楚看出,其中该管理机站2的充电单元25还包含一冷却模块252,该冷却模块252较佳实施为一散热风扇,但并不以此为限,亦可在散热风扇上进一步搭载水冷式或空冷式散热器,以构成冷却循环系统,便可藉由冷却模块252直接对水质感测机1或动力电池16的部位来进行冷却循环送风,以避免动力电池16的锂聚合电池在快速充电的过程中产生高温造成损耗或充电效能降低,进而延长整体的使用寿命,且充电的作业更加安全及稳定。
[0037]
在本实施例中,管理机站2的主控模块22为可对水质感测机1进行管理,包含无人载具11的升降、实时追踪与记录飞行轨迹等,并于主控模块22进一步连接有告警单元26,当主控模块22侦测到无人载具11有异常的状况时,如无法联机或中断、电力不足或产生误动作等,告警单元26便会对外发出一告警信号,包含警示用的声响、语音、光源或电子信息(如电子邮件、简讯或推播通知服务)等,以告知现场操作者可实时作处理,并确保无人载具11正常的运作。
[0038]
上述详细说明为针对本实用新型一种较佳的可行实施例说明而已,但是,该实施例并非用以限定本实用新型的申请专利范围,凡其他未脱离本实用新型所揭示的技艺精神下所完成的均等变化与修饰变更,均应包含于本实用新型所涵盖的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1