一种X射线探伤机升降装置的制作方法
一种x射线探伤机升降装置
技术领域
1.本实用新型涉及x射线探伤机技术领域,具体为一种x射线探伤机升降装置。
背景技术:
2.x射线探伤即射线探伤,是利用x射线穿透金属材料,并通过材料对射线的吸收和散射作用的不同,从而使胶片感光不同,于是在底片上形成黑度不同的影像,据此来判断材料的内部缺陷情况的检测方法,是五大常规无损检测方法之一。
3.在使用x射线探伤机对管道进行无损探伤检测时,需要工作人员将x射线探伤机抬起使射线束中心对准被检测区中心,x射线探伤机需根据被检测焊缝的位置不同而频繁旋转、升降;而现有的x射线探伤机升降机,体积较大且移动笨重,单人无法操作、定位费时费力、适配性较低。
技术实现要素:
4.鉴于现有技术中所存在的问题,本实用新型提供了一种x射线探伤机升降装置,以解决x射线探伤机在探伤检测时单人无法操作且费时费力的问题。
5.采用的技术方案是,包括支撑架、支撑板、万向轮、x射线探伤机、驱动电机、丝杠、升降台,所述支撑架为l形架,包括横架和竖架,所述横架底部设置有所述万向轮,所述竖架上设置有所述升降台和所述驱动电机,所述升降台由所述驱动电机通过所述丝杠驱动,所述升降台上开设有与所述丝杠相配合的螺纹孔,所述升降台上设置有伺服电机,所述伺服电机的输出端与传动轴的一端连接,所述传动轴的另一端与所述支撑板连接,所述支撑板上开设有与所述x射线探伤机相配合的安装槽,所述安装槽底部开设有安装孔,所述安装孔内设置有拉伸弹簧和限位销,所述限位销为u形销,包括限位端和固定端,所述支撑板上还开设有与所述限位销限位端相配合的限位孔,所述支撑架上还设置有控制装置和电源接头。
6.作为本实用新型的一种优选技术方案,所述x射线探伤机两端有把手,所述支撑板为u形板,包括两个竖板和横板,所述竖板上开设的所述安装槽长度与所述x射线探伤机的把手长度相同。
7.作为本实用新型的一种优选技术方案,所述伺服电机为带有自锁功能的伺服电机,且所述传动轴连接处采用锥形齿轮连接。
8.作为本实用新型的一种优选技术方案,所述控制装置采用微处理器,与所述驱动电机和所述伺服电机电性连接。
9.作为本实用新型的一种优选技术方案,所述限位销所述安装孔滑动连接。
10.作为本实用新型的一种优选技术方案,所述万向轮为带有刹车的万向轮。
11.作为本实用新型的一种优选技术方案,所述限位销与所述安装孔的安装深度大于与所述限位孔的限位深度。
12.本实用新型的有益效果:本实用新型中,采用支撑板和限位销的配合,能够将x射
线探伤机固定在支撑架上,方便探伤机的安装与拆卸,提高工作效率;采用升降台和驱动电机的配合,便于探伤机在竖直方向上的升降,提高适配性;采用伺服电机和传动轴的配合,能够使探伤机围绕传动轴旋转,便于射线束中心对准被检测区中心,便于检测人员操作。
13.进一步的,安装槽与探伤机把手长度相同,便于探伤机的固定,避免在探伤机在旋转过程中滑动,造成机器损伤;限位销与安装孔滑动连接,限位销既能够在安装孔中上下滑动,也能够围绕安装孔转动,便于探伤机的固定。
附图说明
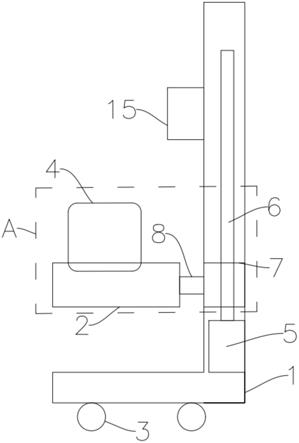
14.图1为本实用新型的结构示意图;
15.图2为本实用新型侧视图;
16.图3为本实用新型a处结构示意图;
17.图4为本实用新型a处爆炸图;
18.图5为本实用新型支撑台示意图。
19.图中:1
‑
支撑架、2
‑
支撑板、3
‑
万向轮、4
‑
x射线探伤机、5
‑
驱动电机、6
‑
丝杠、7
‑
升降台、8
‑
传动轴、9
‑
伺服电机、10
‑
限位销、11
‑
拉伸弹簧、12
‑
安装孔、13
‑
限位孔、14
‑
螺纹孔、15
‑
控制装置、16
‑
安装槽。
具体实施方式
20.下面通过具体实施例对本实用新型的技术方案进行详细说明。
21.如图1至图5所示,包括支撑架1、支撑板2、万向轮3、x射线探伤机4、驱动电机5、丝杠6、升降台7,所述支撑架1为l形架,包括横架和竖架,所述横架底部设置有所述万向轮3,所述竖架上设置有所述升降台7和所述驱动电机5,所述升降台7由所述驱动电机5通过所述丝杠6驱动,所述升降台7上开设有与所述丝杠6相配合的螺纹孔14,所述升降台7上设置有伺服电机9,所述伺服电机9的输出端与传动轴8的一端连接,所述传动轴8的另一端与所述支撑板2连接,所述支撑板2上开设有与所述x射线探伤机4相配合的安装槽16,所述安装槽16底部开设有安装孔12,所述安装孔12内设置有拉伸弹簧11和限位销10,所述限位销10为u形销,包括限位端和固定端,所述支撑板2上还开设有与所述限位销10限位端相配合的限位孔13,所述支撑架1上还设置有控制装置15和电源接头。
22.本实施例中,所述x射线探伤机4两端有把手,所述支撑板2为u形板,包括两个竖板和横板,所述竖板上开设的所述安装槽16长度与所述x射线探伤机4的把手长度相同。
23.本实施例中,所述伺服电机9为带有自锁功能的伺服电机,且所述传动轴8连接处采用锥形齿轮连接。
24.本实施例中,所述控制装置15采用微处理器,与所述驱动电机5和所述伺服电机9电性连接。
25.本实施例中,所述限位销10所述安装孔12滑动连接。
26.本实施例中,所述万向轮3为带有刹车的万向轮。
27.本实施例中,所述限位销10与所述安装孔12的安装深度大于与所述限位孔13的限位深度。
28.本实用新型的工作原理:安装时,通过控制装置15,使驱动电机5工作,带动升降台
7向下运动,当升降台7移动到最低点时,将x射线探伤机4安装在支撑板2上,向上拉动限位销10,拉伸弹簧11被拉伸,限位销10的限位端从限位孔13中滑出时,转动限位销10,将x射线探伤机4的把手放置在安装槽16中,将限位销10反向转动,当限位销10的限位端与限位孔13相对应时,松开限位销10,在拉伸弹簧11的弹力作用下复位,将x射线探伤机4固定。
29.工作时,可根据需要通过控制装置15,对x射线探伤机4升降,对准待检测区域,如果需要旋转,控制带自锁功能的伺服电机9工作,带动传动轴8转动,使支撑板2带动x射线探伤机4转动。
30.另外,微处理器采用爱特梅尔87c51型单片机,用来启停驱动电机和伺服电机,87c51的管脚及连接方式本领域技术人员可参考教材或厂商出版的技术手册获得技术启示。
31.本实用新型涉及的电路连接为本领域技术人员采用的惯用手段,可通过有限次试验得到技术启示,属于公知常识。
32.本文中未详细说明的部件为现有技术。
33.上述虽然对本实用新型的具体实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本实用新型的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1