一种桥梁监测系统的制作方法
1.本实用新型涉及桥梁监测技术领域,具体涉及一种基于机器视觉的桥梁监测系统。
背景技术:
2.桥梁在投入使用后,除了要承受各种自然荷载以外,还不可避免的承受行车动力荷载、超载或撞击等,必将引起桥梁力学或结构性能的变化,这种内在变化将通过动静挠度的形式表现在桥梁表面,为了解桥梁的安全状况需要对其进行长期的结构性安全监测,防止桥梁坍塌等事故的发生。
3.传统的桥梁监测方法用加速度计、应变测试元件、百分表、千分表监测或人工检测,这些方式只能检测结构的单点物理量,且存在效率低、速度慢、重复可比性差、环境局限性大等弊端;用桥梁检测车进行桥梁安全检测,适用范围小,比如在检测跨江、峡谷和位置较高的高架桥等大、长型桥梁时,无法在桥下架设检测支架对主梁、支座及墩台进行监测;利用水准仪进行桥梁的挠度检测,当进行大型桥梁特别是大跨径桥梁挠度检测时,需要依次在多个观测位置上架设水准仪,并用水管进行连接,安装布设繁琐,且由于受到桥梁动态变化的影响,水准仪所在的观测点也处在动态变化中,水管中的水流平衡缓慢,水准仪的水平视轴一直处在变化中,无法保证测量精度;基于差分gnss的挠度监测精度较低,一般只能达到厘米级,对于中小桥的高精度挠度检测,差分gnss通常不能满足使用要求;基于自动全站仪的挠度监测,自动全站仪价格昂贵,监测长型桥梁时,监测速度慢,且自动全站仪属精密仪器,户外监测不易保护。
4.因此,有必要提供一种桥梁监测系统,能够简单有效可行的对桥梁的挠度监测项进行自动化实时监测,以保证桥梁的结构安全。
技术实现要素:
5.为了改善现有技术,本实用新型提出了一种桥梁监测系统,该系统能够同时测量桥梁梁板的动静态挠度及梁板曲面变化,监测精度高,能够有效节约监测成本和时间,且安装与实施便捷,安全性好,监测过程也不会对当地桥面交通造成影响。
6.本实用新型将通过如下技术方案实现技术改良:一种桥梁监测系统,所述桥梁包括柱墩及架设于柱墩上的梁板;所述桥梁监测系统包括现场监测系统、云平台分析系统及客户端查看系统;所述现场监测系统包括设置于梁板上的靶标及观测靶标的智能摄像机,所述智能摄像机内置自动识别程序及解算算法程序,所述智能摄像机识别并观测设置于梁板上的靶标,所述智能摄像机实时监控靶标的竖向位移并解算出靶标的竖向位移数据y,并实时将竖向位移数据y上传至云平台分析系统;所述云平台分析系统包括分析算法程序,现场监测系统实时监测状态下,云平台分析系统实时接收智能摄像机输入的靶标的竖向位移数据y,实时分析竖向位移数据y并自动生成靶标在竖直方向上随时间变化的位移实时曲线,该位移实时曲线即安装靶标处梁板的竖向位移随时间变化的动静挠度组合曲线;所述
客户端查看系统可查看云平台分析系统自动生成的动静挠度组合曲线。
7.进一步地,所述动静挠度组合曲线为在时间轴上呈波浪状的显示梁板静态挠度的静挠度曲线与在时间轴上呈不连续状的多段竖条的动挠度曲线组合,所述云平台分析系统包括数字低通滤波算法程序,通过该程序可将安装靶标处梁板的竖向位移随时间变化的动静挠度组合曲线拆解为随时间变化的呈波浪状的静挠度曲线及随时间变化的呈不连续状的多段竖条的动挠度曲线,所述客户端查看系统可分别查看云平台分析系统拆解后的静挠度曲线及动挠度曲线。
8.进一步地,所述云平台分析系统内设置有静挠度报警值y
静警
与动挠度报警值y
动警
,当云平台分析系统监测到靶标的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时,云平台分析系统向客户端查看系统发送报警提醒,通过客户端查看系统查看报警时间段内的静挠度曲线及动挠度曲线,发现挠度曲线上的某一时间的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时确定桥梁风险,其中挠度报警值y
静警
及y
动警
按照桥梁设计文件的规定设置。
9.进一步地,所述靶标设置于梁板的跨中挠度最大位置处。
10.本实用新型还通过如下技术方案二实现技术改良:一种桥梁监测系统,所述桥梁包括柱墩及架设于柱墩上的梁板,定义梁板上的行车方向为z方向,与行车方向垂直的水平方向为x方向及竖直方向为y方向;所述桥梁监测系统包括现场监测系统、云平台分析系统及客户端查看系统;所述梁板在现场监测系统监测范围内均等分割为多个监测网格区域,所述现场监测系统包括以一定的间隔距离设置于梁板的相应监测网格区域上的靶标及观测多个靶标的智能摄像机,以其中某一靶标为基准,确定各靶标在梁板行车方向上的位置数据z,通过客户端查看系统将各靶标在梁板行车方向上的位置数据z上传至云平台分析系统;所述智能摄像机内置自动识别程序及解算算法程序,所述智能摄像机识别并观测设置于梁板上的多个靶标,所述智能摄像机实时监控各靶标在x方向及y方向上的二维位移并解算出各靶标的二维位移数据x、y,并实时将二维位移数据x、y上传至云平台分析系统;所述云平台分析系统包括分析算法程序,现场监测系统实时监测状态下,云平台分析系统实时接收智能摄像机输入的各靶标的二维位移数据x、y,结合预先输入的各靶标在行车方向上的位置数据z,实时分析各靶标的三维位移数据x、y、z并将各靶标的三维位移数据x、y、z组合生成梁板在各时间点的梁板曲面图像,该梁板曲面图像用于反应桥梁的梁板在具体时间点的动静挠度作用下的具体状态;所述客户端查看系统可查看云平台分析系统自动生成的桥梁的梁板在各时间点的梁板曲面图像。
11.进一步地,所述云平台分析系统将各时间点的梁板曲面图像组合形成时间段内的反应桥梁的梁板变化的动画,所述客户端查看系统可指定时间段查看该时间段内的桥梁的梁板在动静挠度作用下的动画展示。
12.进一步地,所述云平台分析系统内设置有水平位移报警值x
警
,当云平台分析系统监测到某一靶标的水平位移数据x超过水平位移报警值x
警
时,云平台分析系统向客户端查看系统发送报警提醒,通过客户端查看系统查看选定时间段内的桥梁梁板的动画展示及其上靶标的三维位移数据x、y、z确定桥梁风险及风险具体位置,其中水平位移报警值x
警
按照桥梁设计文件的规定设置。
13.本实用新型具有如下有益效果:本实用新型的桥梁监测系统可以同时监测桥梁梁
板的动静态挠度及梁板曲面变化的健康状况,实现了非接触式高精度监测,能够有效节约监测成本和时间,且安装与实施便捷,安全性好,监测过程也不会对当地桥面交通造成影响。
附图说明
14.图1是本实用新型桥梁监测系统的组成结构示意图;
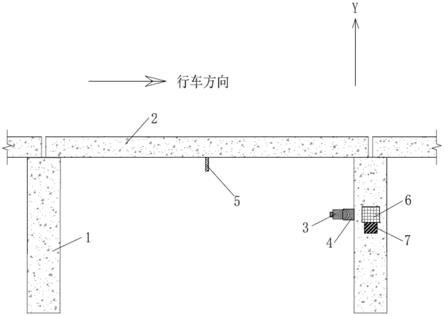
15.图2是本实用新型第一种实施方式的桥梁监测系统的现场监测系统工作场景示意图;
16.图3是图2实施方式下桥梁监测系统监测的梁板某一位置随时间变化的动静挠度组合曲线示意图;
17.图4是图2实施方式下桥梁监测系统监测的梁板某一位置随时间变化的静挠度曲线示意图;
18.图5是图2实施方式下桥梁监测系统监测的梁板某一位置随时间变化的动挠度曲线示意图;
19.图6是本实用新型第二种实施方式的桥梁监测系统的现场监测系统工作场景示意图;
20.图7是图6实施方式下梁板网格式布置靶标示意图;
21.图8是图6实施方式下桥梁监测系统监测的梁板整体在t1时间点的状态示意图;
22.图9是图6实施方式下桥梁监测系统监测的梁板整体在t2时间点的状态示意图;
23.图10是图6实施方式下桥梁监测系统监测的梁板整体在t3时间点的状态示意图;
24.图中:1、柱墩;2、梁板;3、智能摄像机;4、球座;5、靶标;6、太阳能供电模块;7、电控系统。
具体实施方式
25.以下结合附图1至附图10,通过具体实施例进一步说明本实用新型。
26.请参照图1至图2所示,本实用新型第一种实施方式提供一种桥梁监测系统,用于监测桥梁动静挠度。桥梁包括柱墩1及架设于柱墩1上的梁板2。定义梁板2上的行车方向为z方向,与行车方向垂直的水平方向为x方向及竖直方向为y方向。
27.请参照图1所示,桥梁监测系统包括现场监测系统、云平台分析系统及客户端查看系统;
28.请参照图2所示,现场监测系统包括智能摄像机3、球座4、靶标5、太阳能供电模块6及电控系统7。
29.靶标5可设置于梁板2待测范围的任意位置。为监测梁板2的动静挠度,本技术第一种实施方式中,将靶标5设置于梁板2的跨中挠度最大位置处(中心位置)。
30.智能摄像机3设置于柱墩1上或桥梁的附近,使得智能摄像机3能观测到整架桥梁及其上的靶标5。当把智能摄像机3设置于柱墩1上时,可通过球座4安装智能摄像机3以通过球座4角度转动满足智能摄像机3的照射视线需求。
31.太阳能供电模块6与电控系统7连接后安装在柱墩1上,与智能摄像机3成套配置,且与智能摄像机3通过线缆连接,为智能摄像机3供电,并将智能摄像机3采集到的图像信息
与解算数据结果通过网络传输至云平台分析系统,供连接网络的远程客户端查看系统查阅,远程客户端查看系统通过网络与电控系统7进行信息交互。
32.靶标5可一体设置照明装置,以为智能摄像机3夜间监测提供照明。
33.智能摄像机3内置自动识别程序及解算算法程序。
34.初始状态下:智能摄像机3识别并观测设置于梁板2上的靶标5;
35.实时监测状态下:智能摄像机3实时监控靶标5的竖向位移并解算出靶标5的竖向位移数据y,并实时将竖向位移数据y上传至云平台分析系统,云平台分析系统包括分析算法程序,云平台分析系统实时接收智能摄像机3输入的靶标5的竖向位移数据y,实时分析竖向位移数据y并自动生成靶标5在竖直方向上随时间变化的位移实时曲线,该位移实时曲线即安装靶标5处梁板2的竖向位移随时间变化的动静挠度组合曲线。
36.请参照图3至图5所示,动静挠度组合曲线为在时间轴上呈波浪状的显示梁板2静态挠度的静挠度曲线与在时间轴上呈不连续状的多段竖条的动挠度曲线组合。云平台分析系统包括数字低通滤波算法程序,通过该程序可将安装靶标5处梁板2的竖向位移随时间变化的动静挠度组合曲线拆解为随时间变化的呈波浪状的静挠度曲线及随时间变化的呈不连续状的多段竖条的动挠度曲线。监测人员通过客户端查看系统可分别查看云平台分析系统自动生成的动静挠度组合曲线、拆解后的静挠度曲线及动挠度曲线。
37.本实施方式中,进一步于云平台分析系统内设置静挠度报警值y
静警
与动挠度报警值y
动警
,当云平台分析系统监测到靶标5的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时,云平台分析系统向客户端查看系统发送报警提醒,挠度报警值y
静警
及y
动警
按照桥梁设计文件的规定设置。一般的,静挠度报警值设为y
静警
=l/800,其中l为桥梁的跨度,当云平台分析系统监测到靶标(5)的竖向位移数据y≧l/800时,云平台分析系统向客户端查看系统发送报警提醒。监测人员收到报警提醒后,可通过客户端查看系统查看报警时间段内的静挠度曲线及动挠度曲线,发现挠度曲线上的某一时间的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时确定桥梁风险。
38.本实施例一使用时,按照如下步骤实施:
39.1)在被测桥梁的梁板2上设置靶标5,在被测桥梁的柱墩1上或桥梁的附近设置智能摄像机3,智能摄像机3内置自动识别程序及解算算法程序,令智能摄像机3识别并观测设置于梁板2上的靶标5;
40.2)通过客户端查看系统在云平台分析系统内设置静挠度报警值y
静警
与动挠度报警值y
动警
,静挠度报警值y
静警
与动挠度报警值y
动警
按照桥梁设计文件的规定设置;一般的,静挠度报警值设为y
静警
=l/800,其中l为桥梁的跨度;
41.3)令智能摄像机3实时监控靶标5的竖向位移并解算出靶标5的竖向位移数据y,智能摄像机3实时将竖向位移数据y上传至云平台分析系统;
42.4)云平台分析系统包括分析算法程序,智能摄像机3实时监测状态下,令云平台分析系统实时接收智能摄像机3输入的靶标5的竖向位移数据y,实时分析竖向位移数据y自动生成靶标5在竖直方向上随时间变化的位移实时曲线,该位移实时曲线即安装靶标5处梁板2的竖向位移随时间变化的动静挠度组合曲线;
43.5)云平台分析系统包括数字低通滤波算法程序,令云平台分析系统通过该程序将安装靶标5处梁板2的竖向位移随时间变化的动静挠度组合曲线拆解为随时间变化的呈波
浪状的静挠度曲线及随时间变化的呈不连续状的多段竖条的动挠度曲线;
44.6)客户端查看系统可分别查看云平台分析系统自动生成的动静挠度组合曲线、拆解后的静挠度曲线及动挠度曲线;
45.7)当云平台分析系统监测到靶标5的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时,云平台分析系统向客户端查看系统发送报警提醒,通过客户端查看系统查看报警时间段内的静挠度曲线及动挠度曲线,发现挠度曲线上的某一时间的竖向位移数据y超过静挠度报警值y
静警
或动挠度报警值y
动警
时确定桥梁风险;
46.请参照图6至图10所示为本技术第二种实施方式示意图。定义梁板2上的行车方向为z方向,与行车方向垂直的水平方向为x方向及竖直方向为y方向。
47.请参照图7所示,将梁板2在现场监测系统监测范围内均等分割为多个监测网格区域,以一定的间隔距离于梁板2的相应监测网格区域上设置靶标5。以其中某一靶标5为基准,确定各靶标5在梁板2行车方向上的位置数据z,通过客户端查看系统将各靶标5在梁板2行车方向上的位置数据z上传至云平台分析系统。作为一示例,图7中示出了于梁板2上进行监测网格区域划分后,以c位置布置的靶标5为中心,以一定的间隔距离设置多个靶标5。桥梁实际承载过程中,梁板2在行车方向(z方向)上几乎不会产生移动,因此,可以预先确定各靶标5在梁板2行车方向上的位置数据z。
48.智能摄像机3内置自动识别程序及解算算法程序。
49.初始状态下:智能摄像机3识别并观测设置于梁板2上的多个靶标5;
50.实时监测状态下:智能摄像机3实时监控各靶标5在x方向及y方向上的二维位移并解算出各靶标5的二维位移数据x、y,并实时将二维位移数据x、y上传至云平台分析系统。云平台分析系统包括分析算法程序,云平台分析系统实时接收智能摄像机3输入的各靶标5的二维位移数据x、y,结合预先输入的各靶标5在行车方向上的位置数据z,实时分析各靶标5的三维位移数据x、y、z并将各靶标5的三维位移数据x、y、z组合生成梁板2在各时间点的梁板曲面图像,该梁板曲面图像用于反应桥梁的梁板2在具体时间点的动静挠度作用下的具体状态。
51.作为一示例,图8至图10示出了桥梁梁板2上a、b两处的靶标5在连续的t
1、
t2及t3三个时间点的梁板曲面图像,此三个时间点的梁板曲面图像中,显示了a、b两处的靶标5在动静挠度作用下的三维位移数据。但在实际实施方案中,梁板2的不同位置上设置不止两处靶标5,云平台分析系统随着实时接收智能摄像机3输入的各靶标5的二维位移数据x、y,结合预先输入的各靶标5在行车方向上的位置数据z,实时生成各时间点的由多个靶标5三维位移展示的梁板曲面图像。云平台分析系统将各时间点的梁板曲面图像组合形成时间段内的反应桥梁的梁板2变化的动画。客户端查看系统可查看云平台分析系统自动生成的桥梁的梁板2在各时间点的梁板曲面图像,也可指定时间段查看该时间段内的桥梁的梁板2在动静挠度作用下的动画展示。
52.本实施方式中,进一步于云平台分析系统内设置有水平位移(x方向)报警值x
警
,当云平台分析系统监测到某一靶标5的水平位移数据x超过水平位移报警值x
警
时,云平台分析系统向客户端查看系统发送报警提醒,监测人员收到报警提醒后,可通过客户端查看系统查看选定时间段内的桥梁梁板2的动画展示及其上靶标5的三维位移数据x、y、z确定桥梁风险及风险具体位置,其中水平位移报警值x
警
按照桥梁设计文件的规定设置。
53.本实施例二使用时,按照如下步骤实施:
54.1)将被测桥梁的梁板2均等分割为多个监测网格区域,以一定的间隔距离于梁板2的相应监测网格区域上设置靶标5,以其中某一靶标5为基准,确定各靶标5在梁板2行车方向上的位置数据z,通过客户端查看系统将各靶标5在梁板2行车方向上的位置数据z上传至云平台分析系统;
55.在被测桥梁的柱墩1上或桥梁的附近设置智能摄像机3,智能摄像机3内置自动识别程序及解算算法程序,令智能摄像机3识别并观测设置于梁板2上的多个靶标5;
56.2)通过客户端查看系统在云平台分析系统内设置水平位移报警值x
警
,水平位移报警值x
警
按照桥梁设计文件的规定设置;
57.3)令智能摄像机3实时监控各靶标5在水平方向x及竖直方向y上的二维位移并解算出各靶标5的二维位移数据x、y,智能摄像机3实时将二维位移数据x、y上传至云平台分析系统;
58.4)云平台分析系统包括分析算法程序,智能摄像机3实时监测状态下,令云平台分析系统实时接收智能摄像机3输入的各靶标5的二维位移数据x、y,结合预先输入的各靶标5在行车方向上的位置数据z,实时分析各靶标5的三维位移数据x、y、z并将各靶标5的三维位移数据x、y、z组合生成梁板2在各时间点的梁板曲面图像,该梁板曲面图像反应桥梁的梁板2在具体时间点的动静挠度作用下的具体状态;
59.5)令云平台分析系统将各时间点的梁板曲面图像组合形成时间段内的反应桥梁的梁板2变化的动画;
60.6)客户端查看系统可指定时间段查看该时间段内的桥梁的梁板2在动静挠度作用下的动画展示;
61.7)当云平台分析系统监测到某一靶标5的水平位移数据x超过水平位移报警值x
警
时,云平台分析系统向客户端查看系统发送报警提醒,通过客户端查看系统查看选定时间段内的桥梁梁板2的动画展示及其上靶标5的三维位移数据x、y、z确定桥梁风险及风险具体位置。
62.本实用新型具有如下有益效果:本实用新型的桥梁监测系统可以同时监测桥梁梁板2的动静态挠度及梁板曲面变化的健康状况,实现了非接触式高精度监测,能够有效节约监测成本和时间,且安装与实施便捷,安全性好,监测过程也不会对当地桥面交通造成影响。
63.尽管本实用新型的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本实用新型的限制。在本领域技术人员阅读了上述内容后,对于本实用新型的多种修改和替代都将是显而易见的。因此,本实用新型的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1