用于往复冲击机构的微型无线加速度实时检测系统
1.本实用新型涉及往复式液压冲击机械运动特性的检测技术领域,具体涉及一种用于往复冲击机构的微型无线加速度实时检测系统。
背景技术:
2.在研究往复式液压冲击机构的冲击性能时,常需要冲击机构的动态速度和位移信号。但是在很多情况下,获取冲击机构的速度信号和位移信号存在一定困难,甚至无法直接通过测量得到,即使可通过精密仪器测量,仍存在费用过高、测试装置安装困难且容易受损等问题。目前常用的方法有应力波法、高速摄影法、光电位移微分法、电磁感应法、触点法、示功图法和气压法等。但是上述方法无法直接测量冲击机构的速度和位移,要获得在工况下冲击机构的速度和位移,从而检测冲击机构工作状况也十分困难,其中测量冲击机构的速度和位移时需要设置参考点,无法对被测对象直接测量。
技术实现要素:
3.为了克服现有技术存在的缺陷与不足,本实用新型提供一种用于往复冲击机构的微型无线加速度实时检测系统,该检测系统体积小,安装方便,成本较低,可远程实时记录并能够直接测量冲击活塞的运动参数。
4.为了达到上述目的,本实用新型采用以下技术方案:
5.一种用于往复冲击机构的微型无线加速度实时检测系统,包括主控制器、三轴加速度传感器、蓝牙模块、电源模块、终端设备、固定机构;
6.所述主控制器、三轴加速度传感器、蓝牙模块、电源模块分别与固定机构固定连接,所述固定机构内嵌在往复冲击机构中;
7.所述主控制器分别与三轴加速度传感器、蓝牙模块、电源模块连接;
8.所述三轴加速度传感器与往复冲击机构连接,用于采集往复冲击机构运动的方向、加速度数值;
9.所述蓝牙模块还与所述终端设备无线连接。
10.作为优选的技术方案,所述固定机构包括盖部件、第一固定板、第二固定板、第三固定板;
11.所述盖部件与往复冲击机构连接形成封闭腔室;
12.所述第一固定板、第二固定板分别与往复冲击机构固定连接,所述第一固定板和第二固定板在所述封闭腔室内相隔形成第一夹层;
13.所述第三固定板设置在所述第一夹层内,分别与所述第一固定板、第二固定板、往复冲击机构固定连接,所述第三固定板与所述盖部件在所述封闭腔室内相隔形成第二夹层;
14.所述电源模块设置在所述第二夹层内,分别与盖部件、第三固定板、往复冲击机构连接;
15.所述主控制器、三轴加速度传感器、蓝牙模块均设置在所述第三固定板上。
16.作为优选的技术方案,所述盖部件与往复冲击机构连接采用螺纹方式。
17.作为优选的技术方案,所述主控制器采用stm32f373rc控制器,设有pe8、pe9引脚,所述pe8、pe9引脚均为中断控制接口引脚;
18.所述三轴加速度传感器采用adxl345三轴加速度传感器,设有int1、int2引脚,分别与所述pe8、pe9引脚连接,用于中断三轴加速度传感器的输出,所述int1、int2引脚均为中断控制引脚。
19.作为优选的技术方案,所述主控制器采用stm32f373rc控制器,设有pb8、pb9、pf6引脚,所述pb8、pb9、pf6引脚分别为模块串口接收接口、模块串口发送接口、模块唤醒接口引脚;
20.所述蓝牙模块采用rf
‑
bm
‑
4044b4蓝牙模块,设有rxd、txd、brts引脚,分别与所述pb8、pb9、pf6引脚连接,用于数据发送请求时进行唤醒模块,所述rxd、txd、brts引脚分别为模块串口接收、模块串口发送、模块唤醒引脚。
21.作为优选的技术方案,还包括存储器;
22.所述存储器设置在所述第三固定板上,并与所述主控制器连接,用于存储所述往复冲击机构运动的方向、加速度数值。
23.作为优选的技术方案,还包括绝缘部件;
24.所述绝缘部件设置在所述第二夹层,分别与第三固定板、往复冲击机构连接;
25.所述绝缘部件设有凹部,所述电源模块嵌入所述凹部。
26.本实用新型与现有技术相比,具有如下优点和有益效果:
27.(1)本实用新型采用测定往复冲击机构加速度的技术方案,通过将加速度检测装置安装在测定往复冲击机构内部应用在振动测试领域解决了传统测试方法在获取冲击运动参数的变化过程中存在着许多的制约因素,例如当被测对象为液压冲击器、电镐和电锤等空间狭小,冲击活塞高速高频运动的冲击机械时直接测量冲击速度和位移参数很困难以及只能进行室内测试等,达到了直接与被测对象刚性连接,无需设置相对被测试对象静止的参考点,以便对冲击活塞加速度值进行直接测量的技术效果。
28.(2)本实用新型采用三轴加速度传感器,其灵敏度高尺寸小,在满足功能以及质量的前提下,仪器整体尺寸尽可能小的技术方案,解决了传统测试方案存在费用过高、测试装置安装困难等技术问题,达到了安装简单、费用低并且不破坏冲击机构的技术效果。
29.(3)本实用新型采用蓝牙模块作为通信的技术方案,解决了传统测试方案在离线状态下获取加速度信号以及采用wifi做为通信手段局限于必须要在有路由器环境下才能通信的技术问题,达到了能与移动设备进行蓝牙连接并完成无线通信,达到了实现远程实时记录的技术效果。
30.(4)本发明的终端设备采用了移动终端,解决了传统pc端上位机不易携带,笨重的问题。
附图说明
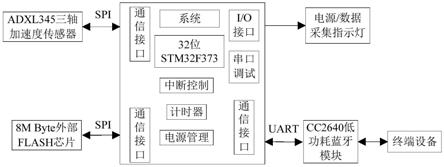
31.图1为本实用新型实施例1的整体机构框图;
32.图2为本实用新型实施例1的主控制器引脚示意图;
33.图3为本实用新型实施例1的三轴加速度传感器引脚示意图;
34.图4为本实用新型实施例1的蓝牙模块引脚示意图;
35.图5(a)为本实用新型实施例1的测试用冲击活塞的结构示意图;
36.图5(b)为本实用新型实施例1的测试用冲击活塞的内部示意图;
37.图5(c)为本实用新型实施例1的图5(b)沿b
‑
b截面图;
38.图5(d)为本实用新型实施例1的图5(b)沿a向的传感器冲击活塞的俯视图;
39.其中,1
‑
盖部件,2
‑
供电部件,3
‑
第一固定板,4
‑
第二固定板、5
‑
第三固定板。
具体实施方式
40.在本公开的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本公开的限制。
41.此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。同样,“一个”、“一”或者“该”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在该词前面的元素或者物件涵盖出现在该词后面列举的元素或者物件及其等同,而不排除其他元素或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
42.在本公开的描述中,需要说明的是,除非另有明确的规定和限定,否则术语“安装”、“相连”、“连接”应做广义理解。例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本公开中的具体含义。此外,下面所描述的本公开不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
43.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
44.实施例
45.实施例1
46.如附图1所示,本实施实例公开了一种用于往复冲击机构的微型无线加速度实时检测系统,包括三轴加速度传感器、主控制器、蓝牙模块、电源模块、终端设备;主控制器分别与三轴加速度传感器、蓝牙模块、电源模块连接;
47.在本实施例中,电源模块用于为其他模块供电;
48.终端设备包括终端处理模块、终端显示模块和终端通信模块;
49.在本实施例中,往复冲击机构采用冲击活塞;主控制器、三轴加速度传感器、蓝牙模块、电源模块内嵌在冲击活塞中;三轴加速度传感器采集检测数据并将检测数据发送至主控制器;主控制器对检测数据进行去除重力、单位转换处理得到预处理数据并将通过蓝牙模块传输至终端通信模块;蓝牙模块将接收到的信息发送至终端设备,终端通信模块将
预处理数据传输至终端处理模块进行解析处理得到解析数据,终端显示模块显示解析数据;其中,检测数据包括冲击活塞运动的方向、加速度数值,活塞运动的方向用加速度数值的符号位正负来表征;解析数据包括速度数据、位移数据、冲击性能数据,冲击性能数据包括冲击功、冲击功率和冲击频率。
50.在本实施例中,该系统还包括存储器,存储器与主控制器连接,用于存储检测数据;
51.如图2所示,主控制器采用stm32f373rc控制器,stm32f373rc控制器的运行模式包括睡眠模式、停止模式、待机模式、工作模式;工作模式下stm32f3系列单片机的典型功耗是2.7ma
‑
7ma;而待机模式下的典型功耗为2ua左右,但是其需要特定的唤醒引脚触发,实时性不好;停止模式下的典型功耗为20ua左右;实际应用时,stm32f373rc控制器的运行模式采用停机模式,采用7
×7×
0.5mm的48引脚lqfp封装,体积小且功耗低;
52.在本实施例中,主控制器在不工作的情况下处于睡眠状态,通过触发唤醒进行工作;实际应用时,终端设备通过终端通信模块发送连接请求信号至主控制器,主控制器通过蓝牙模块接收连接请求信号,主控制器唤醒蓝牙模块,令蓝牙模块退出睡眠模式,主控制器输入高电平至蓝牙模块的rxd、txd、brts引脚(引脚电平变化导致切换状态);主控制器控制三轴加速度传感器进行加速度信号采集,三轴加速度传感器将检测数据通过主控制器传输至蓝牙模块。
53.在本实施例中,当终端设备发送连接断开请求信息时,主控制器根据三轴加速度传感器的int1和int2引脚进行中断使三轴加速度传感器进入睡眠模式。
54.结合图2,如图3所示,三轴加速度传感器采用adxl345三轴加速度传感器,adxl345三轴加速度传感器采用3
×5×
1mm的14引脚小型超薄塑料封装;在本实施例中,adxl345三轴加速度传感器的sd0、sdi、scl、cs、int1、int2引脚分别连接于stm32f373rc控制器的pb14、pb15、pd8、pa0、pe8、pe9引脚,其中sdi、sd0分别为串行数据输入和输出引脚;scl、cs分别为串行端口时钟和串行端口使能引脚;int1、int2为中断控制引脚,adxl345三轴加速度传感器的vdd、vs引脚连接电源vcc端,adxl345三轴加速度传感器的三个gnd引脚接gnd端;pb15、pb14分别为串行数据输入接口和输出接口引脚;pd8、pa0分别为串行端口时钟接口和串行端口使能接口引脚;pe8、pe9引脚均为中断控制接口引脚;实际应用时,检测系统按照如图5(b)所示方式进行安装,垂直于a视图的方向为冲击机构的实际运动方向;adxl345三轴加速度传感器可以测量x轴,y轴,z轴的加速度数据,这三个加速度灵敏轴的输出响应会相对于重力方向发生变化;根据安装装置的特点以及冲击机构的运动方向,确定哪一个加速度灵敏轴为冲击机构的实测方向,往复冲击机构除了在主轴上做往复冲击运动外,也会在上下左右产生微小振动,因此其它的两个灵敏轴可以用作往复冲击机构上下左右的测量。通过上述方式得到往复冲击机构在x轴,y轴,z轴方向上的加速度数据,并将这些数据通过四线spi的方式发送至主控制器;其中adxl345三轴加速度传感器的int1、int2引脚通过设置高电平进行中断输出,具体通过设置int_enable寄存器的适当位进行中断使能,通过设置int_map寄存器来决定映射到int1引脚或int2引脚。
55.如图4所示,蓝牙模块采用rf
‑
bm
‑
4044b4蓝牙模块,设有cc2640芯片,在本实施例中,蓝牙模块的rxd、txd、brts引脚分别与stm32f373rc控制器的pb8、pb9、pf6引脚连接;其中rxd、txd引脚分别为模块串口接收端、模块串口发送端;brts引脚用于数据发送请求时进
行唤醒模块,低电平表示主机有数据发送,高电平表示主机无数据发送;pb8、pb9、pf6引脚分别为模块串口接收接口、模块串口发送接口、模块唤醒接口引脚;其封装尺寸为8
×8×
1mm;实际应用时,蓝牙模块采用从机模式,功耗为3.5ma,具有低功耗的特点。
56.在本实施例中,电源模块采用cr2032电池,即3v纽扣式锂锰电池,进行供电,标称电压为3.0v,端点电压为2.0v,额定容量为200
‑
230mah,圆形电池,尺寸为20.0
×
3.2mm。
57.在本实施例中,电源模块内设有电源低压差稳压单元和电源滤波电路,用于给蓝牙模块和主控制器提供稳定的工作电压;实际应用时,蓝牙模块和主控制器的工作电压为3.3v。
58.在本实施例中,终端设备采用移动终端,通过移动终端的蓝牙接收数据,通过移动终端的处理器处理解析处理得到解析数据,进而通过移动终端的app进行显示解析数据。
59.此外,本实施例主控制器、蓝牙模块、电源模块、三轴加速度传感器不限于本实施例的具体型号,本实用新型仅以此为例,本领域技术人员可根据实际需求进行更换。
60.在本实施例中,adxl345三轴加速度传感器与stm32f373rc控制器之间采用spi进行通信,rf
‑
bm
‑
4044b4蓝牙模块与stm32f373rc控制器之间采用usart进行通信。
61.在本实施例中,蓝牙模块将采集到的加速度数据传输给移动终端的app进行处理数据;实际应用时,stm32f373rc控制器基于systick系统定时器进行监听移动终端的app处理数据前发送过来的连接请求信号,当stm32f373rc控制器接收到连接请求信号时stm32f373rc控制器蓝牙模块进行唤醒,蓝牙模块退出睡眠模式;三轴加速度传感器进行数据采集时,设置用于三轴加速度传感器采集加速度值定时器通过中断进行退出采样循环,以达到控制采样时间。
62.如图5(a)、图5(b)、图5(c)、图5(d)所示,本实施例中的冲击活塞包括盖部件1、第一固定板3、第二固定板4、第三固定板5和活塞主体,通过对活塞主体的中间挖空槽配合盖部件1、第一固定板3、第二固定板4以内嵌测量装置和供电部件2,其中测量装置包括stm32f373rc控制器、adxl345三轴加速度传感器、rf
‑
bm
‑
4044b4蓝牙模块;
63.结合图5(b)、图5(c)所示,第一固定板3和第二固定板4分别垂直于活塞主体并相隔形成第一夹层,使得第三固定板5设置在第一夹层中,第三固定板分别与第一固定板3和第二固定板4固定连接并固定在活塞主体的空槽内;盖部件1与活塞主体连接,将测量装置封装在活塞主体内;盖部件1采用螺纹的方式进而可拆卸、可固定,以对内部测量装置的位置进行调整,便于出现问题时及时拆除检查;
64.在本身实施例中,stm32f373rc控制器、adxl345三轴加速度传感器、rf
‑
bm
‑
4044b4蓝牙模块分别固定安置在第三固定板5上,cr2032电池与stm32f373rc控制器通过绝缘导线连接;结合图5(b)、图5(c)、图5(d)所示,cr2032电池分别与盖部件1、第三固定板5、往复冲击机构连接,设置在盖部件1和第三固定板5相隔形成的第二夹层内;
65.在本实施例中,第三固定板5采用一块半径为9mm的圆形开发板;
66.在本实施例中,冲击活塞内还设有绝缘部件,设置在第二夹层内,绝缘部件分别与cr2032电池和活塞主体连接,在本实施例中,绝缘部件通过将酚醛布棒切出垫片以及将布棒中间掏空出纽扣电池大小的空间用以安装cr2032电池,即绝缘部件设有凹部,用于放置cr2032电池;在本实施例中,采用多个cr2032电池通过层叠的方式来减少安装面积;此外,绝缘部件若采用其他形式和结构,需要做适应性修改,本实施例不限于此。
67.在本实施例中,主控制器通过蓝牙模块接收到数据采集指令后控制三轴加速度传感器开始实时采集往复冲击机构的检测数据,主控制器对采集到的检测数据进行处理得到预处理数据,然后通过蓝牙模块将预处理数据发送到终端设备;终端设备通过终端处理模块对预处理数据进行解析处理得到往复冲击机构的运动参数波形图以及速度位移等信息,并通过终端显示模块进行显示。
68.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1