磁感测系统、检测装置以及磁干扰的偏置方法与流程
1.本发明涉及磁感测系统、检测装置以及磁干扰的偏置方法,更详细而言涉及在去除了对磁传感器中的测定产生影响的磁干扰的状态下检测与外力的作用对应的物理量的磁感测系统、检测装置以及磁干扰的偏置(offset)方法。
背景技术:
2.在与人类共存的同时进行预定的作业的机器人中,设置有在存在于机器人的周围的环境中的人、物接触到机器人时检测作用于该接触部分的按压力、剪切力等外力的力传感器、检测该接触部分的位移的位移传感器等各种传感器。而且,根据来自这些各种传感器的检测值,进行机器人的动作控制。作为这些传感器,例如,已知利用由外力的作用引起的磁场的变化的磁式的力传感器、位移传感器。该磁式的各传感器具备由因外力的作用而进行位移的弹性体等构成位移部、被固定到该位移部的永久磁铁以及探测由永久磁铁产生的测定用磁场的状态的磁传感器。在这些磁式的各传感器中,永久磁铁根据作用的外力的大小而与位移部一体地进行位移,利用伴随该位移而由磁传感器测定的磁场的强度发生变化,检测作用于位移部的外力的大小、位移部的位移量。
3.在此,由于地磁的影响、由其他磁性体或永久磁铁强磁性化的磁性材料等接近磁传感器的附近,可能对从伴随外力的作用而进行位移的永久磁铁生成的测定用磁场产生磁干扰。其结果,无法准确地检测测定用磁场的变化,无法准确地检测作为与外力的作用对应的物理量的外力的大小、上述位移量。
4.另外,在专利文献1中,公开了一种考虑上述磁干扰而检测外力的大小的磁式力觉传感器。该磁式力觉传感器具备:磁铁;位移磁电变换元件,从该磁铁的一方侧的表面隔开预定距离相向配置,并且伴随外力的作用而进行位移,从而检测由外力产生的磁场变化;以及固定磁电变换元件,固定于该磁铁的另一方侧的表面上,不伴随外力的作用而进行位移。在该固定磁电变换元件中,检测与外力的作用无关的磁场的强度。而且,在该磁式力觉传感器中,从与外力的施加对应的位移磁电变换元件中的检测结果减去与外力无关的固定磁电变换元件中的检测结果,求出外力的大小。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2011
‑
112511号公报
技术实现要素:
8.发明要解决的课题
9.然而,在上述专利文献1的磁式力觉传感器中,还需要用于仅检测磁干扰的影响的固定磁电变换元件。而且,固定磁电变换元件相对于检测由外力产生的磁场变化的位移磁电变换元件而夹着磁铁设置于相对侧。因此,由于这样的固定磁电变换元件的追加配置,传感器整体的小型化受到阻碍,并且制约了传感器、机器人的设计自由度。另外,在远离位移
磁电变换元件的位置存在固定磁电变换元件,所以在它们的周围与外力的作用无关地产生的磁场的状况不同的情况下,还存在无法准确地去除用于检测外力的位移磁电变换元件中的磁干扰的影响这样的问题。
10.本发明是为了解决这样的课题而提出的,其目的在于提供一种能够去除磁干扰的影响而准确地检测外力的大小、该外力所作用的部位的位移量等与外力的作用相伴的正确的物理量并且能够使安装于测定物理量的部位的传感器部分的结构变得紧凑的磁感测系统、检测装置以及磁干扰的偏置方法。
11.解决课题的手段
12.为了达成上述目的,本发明主要采用以下结构:一种磁感测系统,具备:感测装置,根据伴随外力的作用而变化的磁场的强度,产生电信号;以及检测装置,根据基于来自该感测装置的电信号的所述磁场的变化,检测与所述外力的作用相伴的物理量,在所述磁感测系统中,所述感测装置具备:磁场产生单元,从由于外力的作用而进行位移的部位产生强度不同的期望的测定用磁场;以及磁场测定单元,测定包括所述测定用磁场在内的周围的磁场的强度,在所述检测装置中,通过预先存储的关系式,根据从所述磁场产生单元产生强度不同的所述测定用磁场时的该测定用磁场的随时间的变动,确定和与该测定用磁场分别地在所述磁场测定单元的周围产生的干扰磁场的强度对应的磁干扰量,去除该磁干扰量的影响,求出所述物理量。
13.另外,本发明采用以下结构:一种检测装置,使从由于外力的作用而进行位移的部位产生的测定用磁场的强度变化,根据该变化,检测与所述外力的作用相伴的物理量,所述检测装置具有以下功能:在以使强度随时间变化的方式产生所述测定用磁场时,通过预先存储的关系式,确定和与所述测定用磁场分别地在周围产生的干扰磁场的强度对应的磁干扰量,去除该磁干扰量的影响,求出所述物理量。
14.而且,本发明采用以下手法:一种偏置方法,应用于根据从由于外力的作用而进行位移的部位产生的测定用磁场的变化来检测与所述外力的作用相伴的物理量的系统,在所述物理量的检测时,去除和与所述测定用磁场分别地在周围产生的干扰磁场的强度对应的磁干扰量的影响,在所述偏置方法中,以使强度随时间变化的方式产生所述测定用磁场,随时间测定所述干扰磁场影响该测定用磁场后的周围的磁场的强度,根据该测定结果和所述测定用磁场的强度,通过预先存储的关系式,确定所述磁干扰量,去除该磁干扰量的影响,求出所述物理量。
15.此外,在本发明的说明书以及权利要求书中,“随时间”这样的用语还考虑了存在利用不同的多个时刻的测定、动作来得到等同的目的和结果的数理上的方法,还包括不限定这些不同的多个时刻的顺序的概念。
16.发明的效果
17.本发明成为以下结构:使用使产生的测定用磁场的强度可变的磁场产生单元,在由磁场产生单元产生强度随时间变化的测定用磁场的状态下,确定磁干扰量,使磁干扰偏置而检测与外力的作用相伴的物理量。因此,无需另外设置测定磁干扰的目的的传感器,能够使安装于测定物理量的部位的传感器部分的结构紧凑化。另外,能够使用共同的磁场测定单元来检测与外力的作用相伴的测定用磁场的状态变化以及磁干扰所引起的干扰磁场的状况,能够在更可靠地排除了磁干扰的状态下准确地检测与外力的作用相伴的测定用磁
场的变化。
附图说明
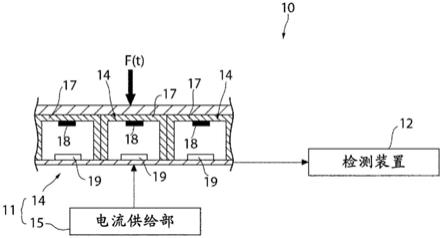
18.图1是第1实施方式中的磁感测系统的概略结构图。
19.图2(a)、(b)是示出第2实施方式中的传感器本体的平面配置的概念图。
具体实施方式
20.以下,参照附图来说明本发明的实施方式。
21.(第1实施方式)
22.在图1中,示出第1实施方式中的磁感测系统的概略结构图。在该图中,所述磁感测系统10具备产生与伴随外力的作用而变化的磁场的强度对应的电信号的感测装置11以及根据基于来自感测装置11的电信号的测定值的磁场的变化来检测与外力的作用相伴的物理量的检测装置12。在本实施方式中,磁感测系统10作为利用由外力的作用引起的磁场的变化来将该外力的大小检测为物理量的磁式的力传感器发挥功能。
23.上述感测装置11由安装于测定外力的期望的部位并产生与所作用的外力的大小对应的电信号的传感器本体14以及与传感器本体14连接并供给电流的电流供给部15构成。
24.所述传感器本体14具备由因外力的作用而进行位移的弹性体构成的位移部17、与位移部17一体地设置的电磁铁18以及在与电磁铁18之间隔开空气层而固定配置并测定周围的磁场的强度的磁传感器19。
25.上述磁传感器19采用由探测磁的元件以及电路基板等构成的公知的构造的传感器。在该磁传感器19中,在对位移部17施加了外力时,检测由于电磁铁18与位移部17一体地进行位移而引起的磁场的变化,产生与该磁场的强度对应的电信号。
26.所述电流供给部15成为以下结构:具有对电磁铁18供给电流的功能,以使作为从电磁铁18产生的磁场的测定用磁场的强度变化的方式使对电磁铁18供给的电流量可变。
27.以上,电流供给部15和电磁铁18构成从由于外力的作用而进行位移的部位产生强度不同的期望值的测定用磁场的磁场产生单元。另外,磁传感器19构成测定包括测定用磁场在内的周围的磁场的强度的磁场测定单元。此外,本发明中的磁场产生单元不限定于本实施方式的结构,只要是调整测定用磁场的强度并一边使该强度发生变化一边产生该强度的结构,则能够采用各种磁场产生装置、系统。另外,对于磁场测定单元,也不限定于本实施方式的磁传感器19的结构,只要起到同样的作用,则能够采用各种设备、系统。
28.上述检测装置12由预定的处理电路以及计算机构成,如后所述具有在根据来自磁传感器19的测定值计算外力的大小时偏置与来自电磁铁18的测定用磁场分别地在磁传感器19的周围产生的磁场(干扰磁场)造成的磁干扰的功能。
29.即,在该检测装置12中,如下所述,通过预先存储的关系式,根据从电磁铁18产生的随时间的测定用磁场的变动,确定和与磁干扰相关的干扰磁场的强度对应的磁干扰量,去除该磁干扰量的影响,求出外力的大小。此外,以下,将检测1轴方向上的外力的大小的力传感器作为对象进行说明,但本发明不限于此,能够将检测多轴方向上的外力的大小的力传感器作为对象来应用同样的手法。
30.首先,在时刻t处的磁传感器19的测定值m(t)、在时刻t处所作用的外力的大小f
(t)、在该时刻t处由电磁铁18产生的测定用磁场的强度e(t)以及该时刻t处的磁干扰量d(t)之间,下式(1)的关系成立,该关系式被预先存储到检测装置12。
31.m(t)=f(f(t))
·
e(t)+d(t)
ꢀꢀ
(1)
32.在此,f(f(t))表示将外力的大小f(t)作为输入值得到的函数,通过该函数,根据外力的大小f(t),求出与测定用磁场的强度e(t)相乘的系数。该函数通过事先进行的校准(校正)作业来确定。
33.然后,根据实测的磁传感器19的测定值m(t)和通过电流供给部15的调整而由电磁铁18产生的已知的测定用磁场的大小e(t),通过上式(1),如下所述求出此时所作用的外力的大小f(t)和磁干扰量d(t)。即,在此求出的外力的大小f(t)根据上式(1)的关系,成为磁干扰被偏置后的值。
34.具体而言,在时刻t1与t2之间的短时间内,在作用于同一传感器本体14的外力的大小f(t1)、f(t2)相同并且磁干扰量d(t1)、d(t2)也相同的情况下,在2个时刻t1与t2之间,使从电流供给部15供给到电磁铁18的电流量变化来使由电磁铁18产生的测定用磁场的强度变化。
35.此时,在时刻t1和t2处实测的磁传感器19的测定值m(t1)、m(t2)和时刻t1和t2处的由电磁铁18产生的测定用磁场的强度e(t1)、e(t2)已知。因此,通过上式(1),在对位移部17施加的外力的大小f(t1)=f(t2)=fx与磁干扰量d(t1)=d(t2)=dy之间,接下来的连立方程式成立,根据该连立方程式,计算外力的大小fx和磁干扰量dy。
36.m(t1)=f(fx)
·
e(t1)+dy
37.m(t2)=f(fx)
·
e(t2)+dy
38.在此,还能够在时刻t1和t2中的任意一个时刻,还能够停止从电流供给部15的电流供给,使由电磁铁18产生的测定用磁场的大小e(t1)、e(t2)中的任意一方成为零。另外,还能够通过依照预定的函数使对电磁铁18供给的电流量相对于时间而变化,使由电磁铁18产生的测定用磁场的强度e(t)相对于时间而规则性、周期性地变化。例如,能够以使测定用磁场的强度e(t)相对于时间而正弦波状地变化的方式,控制从电流供给部15的电流供给。而且,出于高精度地进行外力的检测的理由,时刻t1和t2处的测定用磁场的强度e(t1)、e(t2)优选不微小,另外,出于同样的理由,测定用磁场的强度e(t1)、e(t2)的差优选较大。
39.以上的第1实施方式中的外力的计算以在时刻t1与t2之间进行作用的外力的大小恒定为前提,所以根据基于过去的测定结果的倾向等,推测外力的大小成为恒定的时间,使用该时间内的来自磁传感器19的测定值进行上述处理即可。
40.此外,在上述中,说明了根据2个时刻t1和t2处的测定来求解连立方程式的方法,但在数理上,能够根据更多的时刻的测定值的集合并通过使用例如最小二乘法来以同等或其以上的准确度求出结果。
41.接下来,说明上述第1实施方式的变形例。
42.在该变形例中,在2个时刻t1和t2处进行作用的外力不同的情况下,利用来自相互接近配置的多个传感器本体14的测定结果,根据上式(1),求出在各时刻t1和t2处所作用的外力的大小和对各传感器本体14中的外力的检测产生影响的磁干扰量。
43.即,在该变形例所涉及的检测装置12中,使用以在相同时刻使相同大小的外力进行作用的方式配置的相邻的2个地方的传感器本体14的测定结果,如下所述计算在时刻t1
和t2处进行作用的外力。此外,在以下的说明中,将成为一方侧的第1传感器本体14的磁传感器19中的时刻t1和t2处的测定值表示为m1(t1)、m1(t2),将成为另一方侧的第2传感器本体14的磁传感器19中的时刻t1和t2处的测定值表示为m2(t1)、m2(t2)。另外,将在时刻t1和t2所作用的外力的大小设为fx(t1)、fx(t2)。
44.首先,从电流供给部15,对于相邻的各传感器本体14的各电磁铁18,在相同时刻供给不同的电流量,在相同时刻下由各电磁铁18产生不同的强度的测定用磁场。而且,在该条件下,对于各电磁铁18中的每个电磁铁,在时刻t1、t2处产生不同的强度的测定用磁场。以下,对于第1传感器本体14的电磁铁18,将在时刻t1、t2处产生的测定用磁场的强度表示为e(m1,t1)、e(m1,t2)。另外,对于第2传感器本体14的电磁铁18,将在时刻t1、t2处产生的测定用磁场的强度表示为e(m2,t1)、e(m2,t2)。
45.此时,与对外力的检测产生影响的干扰磁场对应的磁干扰量在设置位置不同的各传感器本体14的各磁传感器19中不同,但在第1传感器本体14的磁传感器19中的磁干扰量dy(m1)和第2传感器本体14的磁传感器19中的磁干扰量dy(m2)各自在时刻t1、t2不变化的短时间内进行处理。在该状况下,第1传感器本体14的磁传感器19的时刻t1、t2处的测定值m1(t1)、m1(t2)和第2传感器本体14的磁传感器19的时刻t1、t2处的测定值m2(t1)、m2(t2)由于分别被实测而是已知的。另外,对于由各电磁铁18产生的测定用磁场的强度e(m1,t1)、e(m1,t2)、e(m2,t1)、e(m2,t2),也被预先掌握而是已知的。因此,利用这些已知的各值,根据上式(1),得到将在时刻t1和t2处所作用的外力的大小fx(t1)、fx(t2)和各磁传感器19中的磁干扰量dy(m1)、dy(m2)作为变量的接下来的连立方程式,这些变量通过求解该连立方程式来求出。
46.m1(t1)=f(fx(t1))
·
e(m1,t1)+dy(m1)
47.m2(t1)=f(fx(t1))
·
e(m2,t1)+dy(m2)
48.m1(t2)=f(fx(t2))
·
e(m1,t2)+dy(m1)
49.m2(t2)=f(fx(t2))
·
e(m2,t2)+dy(m2)
50.此外,在磁干扰量根据时刻而变化的情况下,通过以能够在同一时刻测定同一磁干扰量的方式配置第1及第2传感器本体14中的各磁传感器19,如上所述根据上式(1)求出外力的大小和磁干扰量。另外,在该情况下,通过针对各磁传感器19确定磁干扰量和时刻的关系,类似地求出外力的大小和磁干扰量。
51.接下来,说明本发明的第2实施方式。此外,在以下的说明中,对与所述第1实施方式相同或等同的结构部分附加相同符号,省略或简化说明。
52.(第2实施方式)
53.在本实施方式中,如图2(a)、(b)例示,在沿着预定的平面均匀地配置多个的传感器本体14中,将几个传感器本体配置为不受外力作用的偏置用传感器21,将其余传感器配置为外力进行作用的外力检测用传感器22。作为构成这些传感器21、22的磁性体,不限于电磁铁18而能够采用永久磁铁等任意种类的磁性体。在此,例如,作为偏置用传感器21,在位移部17中不设置电磁铁18等磁性体而仅由磁传感器19构成,另一方面,作为外力检测用传感器22,使用与第1实施方式中的传感器本体14相同的结构。
54.在本实施方式中的检测装置12中,通过在根据来自偏置用传感器21的检测结果确定磁干扰量后从外力检测用传感器22的测定值减去该磁干扰量,在将磁干扰偏置的状态
下,求出作用于传感器本体14的外力。另外,也可以根据附近的多个地方的偏置用传感器21中的检测结果,对于设置于它们之间的外力检测用传感器22,基于与各偏置用传感器21的相对距离来依照预定的计算而求出该位置处的磁干扰量,从外力检测用传感器22的测定值减去磁干扰量。
55.根据该第2实施方式,沿着与外力检测用传感器22相同的面配置偏置用传感器21,所以相比于在厚度方向上配置这些传感器21、22的情况,能够使传感器本体14的厚度最小化。
56.此外,在上述各实施方式中,图示说明了使磁感测系统10作为磁式的力传感器发挥功能的例子,但本发明不限于此,还能够应用于作为将外力所作用的部位的位移量检测为与外力的作用相伴的物理量的磁式的位移传感器发挥功能的磁感测系统。总之,本发明能够总体地应用于作为根据磁场的变化来检测预定的物理量的磁式的各种传感器发挥功能的系统。
57.另外,本发明中的装置各部的结构不限定于图示结构例,只要起到实质上同样的作用,就能够进行各种变更。
58.符号说明
59.10 磁感测系统
60.11 感测装置
61.12 检测装置
62.14 传感器本体
63.15 电流供给部(磁场产生单元)
64.17 位移部
65.18 电磁铁(磁场产生单元)
66.19 磁传感器(磁场测定单元)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1