具有一致MRAM裸片定向的MOKE计量的系统及方法与流程
具有一致mram裸片定向的moke计量的系统及方法
1.相关申请案
2.本技术案主张2019年7月24日申请的第62/877,908号美国临时专利申请案的优先权,所述案的全部内容为了全部目的以引用的方式并入。
技术领域
3.本公开涉及磁光克尔(kerr)效应(moke),且更明确来说,本公开涉及用于特性化磁性随机存取存储器(mram)的moke计量。
背景技术:
4.磁光克尔效应(moke)是指当从磁性表面反射时光的偏振的旋转。moke测量可用于特性化连续及图案化薄膜两者。例如,moke测量用于特性化磁性随机存取存储器(mram)装置,其中磁性薄膜经图案化为位胞。moke测量可在图案化之前及之后进行以测量图案化对装置的磁性质的影响。moke测量也被称为moke计量。
5.图1是moke测量系统100的示意图。moke测量系统100包含具有第一极片104-1及第二极片104-2的磁铁102。磁铁102(其为电磁铁)还包含缠绕极片104-1及104-2的相应导电线圈106-1及106-2。晶片110定位在磁铁中在极片104-1与104-2之间。(当晶片110定位在极片104-1与104-2之间时,晶片的部分可侧向延伸超出极片104-1及104-2的底部边缘,如图1中所展示)。晶片110可为被划分为多个mram裸片(例如mram裸片302,图3)的mram晶片(例如mram晶片300,图3)。磁铁102产生法向(即,垂直)于晶片110的表面的磁场(h)108。如果晶片110是mram晶片,那么磁场108垂直于晶片上的mram裸片的表面。
6.moke测量系统100还包含光学器件以提供激光束114且引导激光束114以入射于晶片110上,其中晶片110定位在磁铁中在极片104-1与104-2之间。激光束114法向入射于晶片110上(即,垂直于晶片110的表面)。光学器件包含用以产生激光束114的激光器112、用以使激光束114偏振的偏振器116及用以引导激光束114,使得其入射于晶片110上的镜118-1及118-2。尽管图1展示两个镜118-1及118-2,但镜118的数目及布置可针对moke测量系统100的不同实施方案而不同。如由偏振器116偏振的激光束114具有特定偏振(例如具有特定偏振平面)。
7.为进行moke测量,当磁铁102产生磁场108时(例如当电流施加于导电线圈106-1及106-2时)提供激光束114且将其引导到晶片110上,其中晶片110定位在磁场108中。激光束114由晶片110反射(例如由mram裸片302中的mram阵列304反射,图3),从而产生由检测器122接收的反射激光束120。反射激光束120的偏振(例如偏振平面)归因于moke而相对于激光束114的偏振(例如偏振平面)旋转。检测器122测量此旋转。检测器122包含结合偏振器116使用以测量旋转的分析器。可基于这些moke测量确定所关注的各种磁性质(例如矫顽磁力、饱和磁化、交换耦合、域结构、自旋偏振、开关曲线及/或磁滞曲线)。
8.moke测量系统100测量极性moke,其中磁场108及激光束114两者法向于晶片110的表面。极性moke测量用于特性化具有垂直型磁性穿隧接面(mtj)堆叠的mram装置,例如自旋
力矩转移(stt)mram装置。
9.图2是传统上用于将晶片110定位在磁铁102中在极片104-1与104-2之间(图1)的载物台系统200的透视图。载物台系统200包含晶片110可安装在其上的旋转卡盘202。电动机208使卡盘202围绕卡盘202的中心轴线旋转。中心轴线是卡盘202的旋转轴线。卡盘202耦合到可由电动机210沿轨道206移动(即,平移)的平移载物台204(很大程度上被图2中的卡盘挡住)。载物台系统200因此在卡盘202可沿其平移的轨道206的方向上(即,平行于轨道206)具有单个平移轴线。通过卡盘202的旋转与卡盘202沿单个平移轴线的平移的组合,晶片110的不同区域(例如晶片110上的每一裸片)连续定位在激光束114中(即,经定位以接收激光束)且相应地进行区域(例如裸片)的moke测量。
10.图3是被划分为多个mram裸片302的mram晶片300的假设实例。每一mram裸片302是包含mram位胞阵列304的完全或部分制造mram装置。(在图3中,阵列304为了简单而仅针对单个mram裸片302展示。)mram晶片300可安装在卡盘202(图2)上且定位在moke测量系统100的磁铁102中在极片104-1与104-2之间(图1)。在图3中,晶片300已经定位使得激光束114(图1)的光束点306入射于mram裸片302的阵列304上。光束点306可具有大约1毫米或大体上更小(例如大约数微米)的光点大小。通过使卡盘202旋转及使卡盘202沿载物台系统200(图2)的单个平移轴线平移,每一mram裸片302可连续定位使得光束点306连续入射于mram裸片302上。每一mram裸片302可借此当定位在磁场108(图1)中时接收及反射激光束114,且可相应地进行每一mram裸片302的moke测量。
技术实现要素:
11.使用载物台系统200(图2)及其单个平移轴线将每一mram裸片302连续定位在mram晶片300上的光束点306(图3)中使mram晶片300上的不同mram裸片302具有相对于激光束114的偏振(例如相对于激光束114的偏振平面)的不同定向。因此,mram裸片302相对于激光束114的偏振的定向取决于mram晶片300上的mram裸片302的位置而变动。然而,mram裸片的moke测量的信噪比取决于mram裸片相对于激光束114的偏振的定向而变动。相对定向的此晶片位置相依性源自mram裸片上的磁性膜的图案化以形成位胞,其暴露(例如底部电极的)下伏层的部分。一些相对定向引起信噪比的急剧降低。例如,一些相对定向的信噪比可降至低于用于执行moke测量的阈值。因此,moke测量可受限于对晶片上的mram裸片的部分进行取样且对于一些裸片来说可比其它裸片具有更多噪声。
12.因此,需要测量其中mram晶片上的相应mram裸片(例如所有mram裸片)经定位,使得其具有相对于用于moke测量的激光束的偏振的共同定向的mram裸片的moke的方法及系统。
13.在一些实施例中,一种计量工具包含用以产生磁场的磁铁。所述计量工具还包含用以将多个mram裸片定位在所述磁场中的mram晶片上的载物台系统。所述载物台系统包含其上将要安装所述mram晶片的卡盘。所述计量工具进一步包含用以提供激光束且引导所述激光束以在所述mram晶片上的相应mram裸片定位在所述磁场中的情况下入射于所述相应mram裸片上的光学器件。所述激光束具有偏振。所述计量工具额外包含用以接收由所述mram晶片上的所述相应mram裸片反射的所述激光束且测量所述反射激光束的所述偏振的旋转的检测器。所述计量工具可配置以当所述激光束在所述mram晶片上的每一mram裸片定
位在所述磁场中的情况下入射于所述mram裸片上时,为所述mram裸片提供相对于所述激光束的所述偏振的共同定向。
14.在一些实施例中,一种在计量工具中执行的方法包含产生磁场且将包含多个mram裸片的mram晶片定位在所述磁场中。在所述mram晶片定位在所述磁场中的情况下,提供激光束以入射于所述mram晶片上。所述激光束具有偏振。所述mram晶片上的相应mram裸片经连续定位使得所述激光束在所述相应mram裸片定位在所述磁场中时连续入射于所述相应mram裸片上。当所述激光束入射于所述mram裸片上时,所述相应mram裸片中的每一者经定向为具有相对于所述激光束的所述偏振的共同定向。针对所述相应mram裸片中的每一者,测量由所述mram裸片反射的所述激光束的所述偏振的旋转。
15.在一些实施例中,一种计量工具包含用以产生磁场的磁铁。所述计量工具还包含用以将多个mram裸片定位在所述磁场中的mram晶片上的载物台系统。所述载物台系统包含其上将要安装所述mram晶片的卡盘。所述计量工具进一步包含用以提供激光束且引导所述激光束以在所述mram晶片上的相应mram裸片定位在所述磁场中的情况下入射于所述相应mram裸片上的光学器件。所述激光束具有偏振。所述计量工具额外包含用以接收由所述mram晶片上的所述相应mram裸片反射的所述激光束且测量所述反射激光束的所述偏振的旋转的检测器。所述计量工具进一步包含一或多个处理器及存储用于由所述一或多个处理器执行的一或多个程序的存储器。所述一或多个程序包含用于当所述激光束在所述mram晶片上的每一mram裸片定位在所述磁场中的情况下入射于所述mram裸片上时,为所述mram裸片提供相对于所述激光束的所述偏振的共同定向的指令。
附图说明
16.为了各种所描述的实施方案的更好理解,应结合下图参考以下具体实施方式。图可不按比例。
17.图1是moke测量系统的示意图。
18.图2是用以使晶片旋转且使晶片沿平移轴线平移的载物台系统的透视图。
19.图3是被划分为多个mram裸片的mram晶片的假设实例,其中激光束入射于相应mram裸片上。
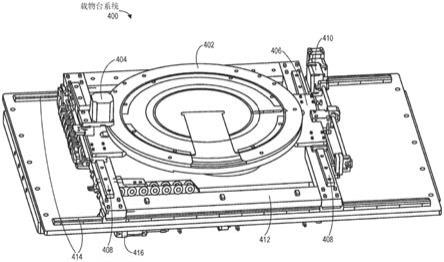
20.图4是根据一些实施例的使晶片旋转且使晶片沿两个平移轴线平移的载物台系统的透视图。
21.图5是根据一些实施例的moke测量系统的示意图。
22.图6及7是mram裸片上的mram阵列的moke测量的实例。
23.图8是展示根据一些实施例的使用moke特性化mram裸片的方法的流程图。
24.图9是根据一些实施例的moke计量系统的框图。
25.相同元件符号指代图及说明书通篇的对应部分。
具体实施方式
26.现将详细参考各种实施例,其实例在附图中说明。在以下详细描述中,阐述多种具体细节以提供各种所描述的实施例的彻底理解。然而,所属领域的一般技术人员应明白可在无需这些具体细节的情况下实践各种所描述的实施例。在其它例项中,众所周知的方法、
过程、组件、电路及网络尚未被详细描述以不非必要地使实施例的方面不清楚。
27.公开用于对mram裸片执行moke测量的方法及系统,其允许mram晶片(例如mram晶片300,图3)上经定位用于moke测量的相应mram裸片(例如所有mram裸片)具有相对于用于moke测量的激光束(例如激光束114,图1)的偏振(例如相对于偏振平面)的共同定向。此类方法及系统确保相应mram裸片的moke测量可使用足够信噪比执行。例如,此类方法及系统可确保可使用moke测量特性化(即,检验)mram晶片上的所有mram裸片或经识别为用于mram晶片上的检验的候选者的所有mram裸片。
28.图4是可用于moke测量系统中以将相应mram裸片(例如所有mram裸片)定位在磁场(例如h 108,图1)中的mram晶片(例如mram晶片300,图3)上的载物台系统400的透视图。根据一些实施例,载物台系统400可将mram晶片上的相应mram裸片(例如所有mram裸片)定向为具有相对于moke测量系统的激光束(例如激光束114,图1)的偏振(例如相对于偏振平面)的共同定向。例如,载物台系统400可用于极性moke测量系统(例如moke测量系统100,图1)、纵向moke测量系统或横向moke测量系统中。共同定向可为已预定针对moke测量提供足够信噪比的定向。载物台系统400包含晶片(例如晶片110,图1;晶片300,图3)可安装在其上的旋转卡盘402。电动机404使卡盘402围绕卡盘402的旋转轴线(例如中心轴线)旋转。卡盘402耦合到可由电动机410沿轨道408移动(即,平移)的第一平移载物台406。第一平移载物台406耦合到可由电动机416沿轨道414移动(即,平移)的第二平移载物台412。第一平移载物台406将卡盘402耦合到第二平移载物台412。第一平移载物台406及第二平移载物台412的移动相应地使卡盘402平移:移动第一平移载物台406使卡盘在轨道408的方向上平移,且移动第二平移载物台412使第一平移载物台406及卡盘402在轨道414的方向上平移。
29.载物台系统400因此具有两个平移轴线:轨道408的方向(即,平行于轨道408)上的第一平移轴线,第一载物台406可使卡盘402沿其平移;及轨道414的方向(即,平行于轨道414)上的第二平移轴线,第二载物台412可使第一平移载物台406及卡盘402沿其平移。电动机410使第一平移载物台406沿第一平移轴线移动。电动机416使第二平移载物台412沿第二平移轴线移动。在一些实施例中,第一及第二平移轴线是垂直的。例如,轨道408垂直于轨道414(在制造公差内)。
30.通过将mram晶片安装在卡盘402上,将经安装在卡盘402上的mram晶片定位在moke测量系统的磁铁中(例如磁铁102的极片104-1与104-2之间,图1),及执行使卡盘402旋转及使卡盘402沿第一及第二平移轴线平移的组合,当激光束连续入射于mram晶片上的相应mram裸片(例如每一mram裸片)上时,mram裸片可在磁铁的磁场(例如h 108,图1)中被连续地定位为具有相对于moke测量系统的激光束的偏振的共同定向。例如,共同定向可通过使卡盘402及因此mram晶片旋转来实现。接着,相应mram裸片可经连续地定位为具有共同定向以通过使卡盘402及因此mram晶片沿第一及第二平移轴线平移来接收激光束。
31.共同定向可替代地通过使光学组件旋转来实现。图5是根据一些实施例的moke测量系统500的示意图。moke测量系统500包含moke测量系统100(图1)的组件,其中激光器112、偏振器116及检测器122由可围绕其相应纵轴线旋转的激光器512、偏振器516及检测器522替换:激光器512可围绕其纵轴线502旋转,偏振器516可围绕平行于激光束514的光学路径的纵轴线旋转,且检测器522(例如检测器522内的分析器)可围绕平行于反射激光束520的光学路径的纵轴线旋转。在一些实施例中,激光器512及偏振器516经配置以旋转达相等
量(例如一起旋转)。在一些实施例中,检测器522(例如检测器522内的分析器)经配置以根据激光器512及偏振器516的旋转来旋转。例如,检测器522(例如检测器522内的分析器)经配置以旋转达相等于激光器512及偏振器516的量(例如与激光器512及偏振器516一起旋转)。
32.旋转激光器512及偏振器516使激光束514的偏振旋转(例如使激光束514的偏振平面旋转)。激光器512及偏振器516可旋转以当针对不同mram裸片执行moke测量时维持不同mram裸片相对于激光束514的偏振的共同定向。例如,可使用载物台系统200(图2)将mram晶片300上的不同mram裸片302连续定位在磁场108中在第一极片104-1与第二极片104-2之间,使得激光束514连续入射于不同mram裸片302上。载物台系统200及其单个平移轴线使不同mram裸片302在经定位以依此方式接收激光束514时具有不同绝对定向。旋转激光器512及偏振器516允许不同mram裸片302具有相对于激光束514的偏振的共同定向,而与不同mram裸片302的不同绝对定向无关。使检测器522(例如检测器522内的分析器)根据激光器512及偏振器516的旋转而旋转允许检测器522测量反射激光束520的偏振的旋转(即,如相对于入射激光束514的偏振测量)。
33.在另外其它替代方案中,共同定向可通过使mram晶片保持静止及使moke测量系统的全部或一部分移动来实现。例如,磁铁102及moke测量系统100(图1)的光学器件的全部或一部分可在mram晶片安装在其上的载物台系统静止时移动。
34.图6及7是mram裸片上的mram阵列的moke测量的实例。图6展示mram阵列的高场、全堆叠测量,而图7展示mram阵列的低场、自由层测量。图6及7的x轴是磁场强度(例如以oe为单位),而y轴是任意单位的克尔旋转。在图6中,曲线602针对递增磁场测量且曲线604针对递减磁场测量。在图7中,曲线702针对递增磁场测量且曲线704针对递减磁场测量。所关注的磁性质可使用已知技术从曲线602、604、702及704提取。这些类型的曲线可使用moke测量系统(例如moke测量系统100(图1)或500(图5))获得。
35.图8是展示根据一些实施例的使用moke特性化mram裸片的方法800的流程图。在方法800中,将mram晶片(例如mram晶片300,图3)安装(802)在卡盘上。所述mram晶片包含多个mram裸片(例如mram裸片302,图3)。
36.产生(804)磁场。将所述mram晶片定位(806)在所述磁场中。例如,所述mram晶片定位在第一极片104-1与第二极片104-2之间(图1或5)。在一些实施例中,所述磁场(例如h 108,图1或图5)经配置(808)以法向于所述mram晶片上的相应mram裸片。
37.在所述mram晶片定位在所述磁场中的情况下,提供(810)激光束(例如激光束114,图1;激光束514,图5)以入射于所述mram晶片上。所述激光束具有含定向的偏振。使用激光器(例如激光器112,图1;激光器512,图5)产生(812)所述激光束且使用偏振器(例如偏振器116,图1;偏振器516,图5)使所述激光束偏振(814)以具有偏振。
38.连续定位(816)所述相应mram裸片(例如所述mram晶片上的每一mram裸片),使得所述激光束在所述相应mram裸片定位在所述磁场中时连续入射于所述相应mram裸片上。当所述激光束入射于所述mram裸片上时,将所述相应mram裸片中的每一者(例如所述晶片上的每一mram裸片)定向(816)为具有相对于所述激光束的所述偏振(例如相对于所述激光束的所述偏振平面)的共同定向。所述共同定向可为已预定针对moke测量提供足够信噪比的定向。所述相应mram裸片反射所述激光束。
39.在一些实施例中,引导(818)所述激光束以法向入射于所述相应mram裸片上(例如如图1及5中所展示)。
40.在一些实施例中,连续定位所述相应mram裸片包含使所述卡盘旋转(820)及使所述卡盘沿第一平移轴线及沿第二平移轴线平移(822)。例如,卡盘402沿载物台系统400(图4)的第一及第二平移轴线平移。第一及第二平移轴线可为垂直的(在制造公差内)。
41.在一些实施例中,将所述相应mram裸片中的每一者定向为具有所述共同定向包含使所述激光器(例如激光器512,图5)及所述偏振器(例如偏振器516,图5)围绕其相应纵轴线旋转(824)以改变入射激光束的偏振。例如,结合通过使所述卡盘(例如卡盘202,图2)旋转及使所述卡盘沿单个平移轴线平移(例如使用载物台系统200,图2)连续定位所述相应mram裸片来执行通过使所述激光器及偏振器旋转而定向所述mram裸片。
42.针对所述相应mram裸片中的每一者,测量(826)由所述mram裸片反射的所述激光束的所述偏振(例如所述激光束的所述偏振平面)的旋转。因此执行moke测量。在一些实施例中,检测器122(图1)或522(图5)包含用于测量由所述mram裸片反射的所述激光束的所述偏振的旋转的分析器。
43.在一些实施例(例如其包含步骤824)中,根据所述激光器及所述偏振器的旋转使用于测量由所述相应mram裸片反射的所述激光束的所述偏振的旋转的检测器(例如检测器522,图5)旋转(828)。
44.尽管方法800包含呈现为以特定顺序发生的若干操作,但方法800可包含更多或更少操作。一些操作可依序或并行执行。两个或更多个非顺序相依操作的顺序可改变,两个或更多个操作的执行可重叠且两个或更多个操作可组合成单个操作。例如,步骤806可包含在产生磁场之前将mram晶片定位在磁铁中,使得当在步骤804中产生磁场(例如通过将电流施加于线圈106-1及106-2,图1或5)时,mram晶片位于期望位置中。
45.图9是根据一些实施例的moke计量系统900的框图。moke计量系统900包含moke检验工具930,及具有一或多个处理器902(例如cpu)、用户界面906、存储器910及互连这些组件的(若干)通信总线904的计算机系统。计算机系统替代地可通过一或多个网络与moke检验工具930通信地耦合。计算机系统可进一步包含用于与moke检验工具930及/或远程计算机系统通信的一或多个网络接口(有线及/或无线,未展示)。
46.moke检验工具930包含测量系统932(例如moke测量系统100,图1或500,图5)及载物台系统934(例如载物台系统200,图2或400,图4)。在一些实施例中,测量系统932是moke测量系统100(图1),且载物台系统934是载物台系统400(图4)。在一些其它实施例中,测量系统932是moke测量系统500(图5),且载物台系统934是载物台系统200(图2)。
47.用户界面906可包含显示器907及一或多个输入装置908(例如键盘、鼠标、显示器907的触敏表面等)。显示器907可显示moke测量结果(例如方法800的结果,图8)。例如,显示器907可显示图6及7中所展示的类型的曲线。
48.存储器910包含易失性及/或非易失性存储器。存储器910(例如存储器910内的非易失性存储器)包含非暂时性计算机可读存储媒体。存储器910任选地包含自处理器902远程地定位的一或多个存储装置及/或可移除地插入计算机系统中的非暂时性计算机可读存储媒体。在一些实施例中,存储器910(例如存储器910的非暂时性计算机可读存储媒体)存储以下模块及数据或其子集或超集:包含用于处置各种基本系统服务及用于执行硬件相依
任务的过程的操作系统912、用于使载物台系统934将mram裸片定位在测量系统932的磁铁中以具有相对于激光束的偏振的共同定向以接收所述激光束的定位模块914、用于使测量系统932进行moke测量的moke测量模块916,及用于报告moke测量结果(例如曲线,例如图6及7中的曲线)(例如方法800的结果,图8)的报告模块920。存储器910(例如存储器910的非暂时性计算机可读存储媒体)(例如定位模块914及moke测量模块916一起)可包含用于执行方法800(图8)的全部或部分的指令。
49.存储在存储器910中的模块中的每一者对应于用于执行本文所描述的一或多个功能的一组指令。单独模块不需要被实施为单独软件程序。模块及模块的各种子集可组合或以其它方式重新布置。在一些实施例中,存储器910存储上文所识别的模块及/或数据结构的子集或超集。
50.更期望图9作为可存在于moke计量系统中的各种特征的功能描述而非作为结构示意图。例如,moke计量系统900中的计算机系统的功能性可在多个装置之间分割。存储在存储器910中的模块的部分可替代地存储在通过一或多个网络与moke计量系统900的计算机系统通信地耦合的一或多个其它计算机系统中。
51.为了说明的目的,已参考特定实施例描述前述描述。然而,以上说明性讨论不旨在为穷举或使权利要求的范围受限于所公开的精确形式。鉴于以上教示,许多修改及变动是可行的。选择实施例以便最好地说明权利要求的基本原理及其实践应用以借此使得所属领域的其它技术人员能够最好地使用具有适于经考虑特定用途的各种修改的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1