用于确定多图案的线角度及旋转的方法与流程
1.本公开内容的实施方式大致涉及用于光学装置制造的设备及方法。更特定地,本公开内容的实施方式设计用于测量在波导中并入的光栅结构的拼接品质的设备及方法。
背景技术:
2.虚拟现实一般被认为是计算机生成的模拟环境,在其中使用者有明显的实体存在。虚拟现实体验能以三维(3d)生成并利用头戴式显示器(hmd)来观看,头戴式显示器诸如是眼镜或其他可穿戴显示装置,这些装置具有近眼显示面板作为镜片,来显示替代真实环境的虚拟现实环境。
3.然而,增强现实使得能够实现这样一种体验,其中使用者仍能看穿眼镜或其他hmd装置的显示镜片来观看周围环境,又能看到被生成以供显示并作为该环境的一部分出现的虚拟物体图像。增强现实能包括任何类型的输入,像是音频或触觉输入,还有加强或增强使用者所经历的环境的虚拟图像、图形、和视频。增强现实作为新兴技术,有许多挑战及设计限制。
4.一个挑战是显示叠加在周围环境上的虚拟图像。波导被用来辅助叠加图像。所生成的光通过波导传播直到光离开波导并被叠加在周围环境上。制造波导可能是有挑战性的,因为波导倾向于具有不均匀的属性。制造波导中的常有的议题是测量光栅线的拼接品质的能力。测量拼接品质上的先前尝试已经证实是昂贵且费时的。因此,本领域中需要的是量化光栅结构上的光栅线的拼接品质的改良方法及系统。
技术实现要素:
5.在一个实施方式中,提供一种用于线角度(line angle)的测量方法。该方法包括选择光栅结构的视野,使用测量工具来识别出线特征,以及选择沿着该线特征的起点。测量一级坐标,且该一级坐标包括第一x坐标及第一y坐标,其中该第一x坐标是从该视野的边缘到该一级坐标的第一距离。测量沿着该线特征的二级坐标,且该二级坐标包括第二x坐标及第二y坐标,其中该第二x坐标是从该视野的该边缘到该二级坐标的第二距离。使用该一级坐标及该二级坐标估计理论线特征,以及计算在该理论线特征与参考轴之间的线角度测量值。
6.在另一实施方式中,提供一种测量光栅结构的线角度旋转(line angle rotation)的方法。该方法包括测量第一线角度。测量该第一线角度包括选择光栅结构的视野,使用测量工具来识别出线特征,以及选择沿着该线特征的起点。测量一级坐标,且该一级坐标包括第一x坐标及第一y坐标,其中该第一x坐标是从该视野的边缘到该一级坐标的第一距离。测量沿着该线特征的二级坐标,且该二级坐标包括第二x坐标及第二y坐标,其中该第二x坐标是从该视野的该边缘到该二级坐标的第二距离。使用该一级坐标及该二级坐标估计理论线特征,以及计算在该理论线特征与参考轴之间的线角度测量值。利用与用于测量该第一线角度的相同方法来测量第二线角度。计算该第一线角度与该第二线角度的
差,以确定该线角度旋转,且将该线角度旋转与设计规格线角度测量值进行比较。
7.在又一实施方式中,提供一种测量光栅结构的线角度旋转的方法。该方法包括定位测量工具来测量光栅结构中的第一图像曝光。该方法进一步包括测量第一线角度。测量该第一线角度的步骤包括选择光栅结构的视野,使用测量工具来识别线特征,及选择沿着该线特征的起点。测量一级坐标,且该一级坐标包括第一x坐标及第一y坐标,其中该第一x坐标是从该视野的边缘到该一级坐标的第一距离。沿着该线特征测量二级坐标,及该二级坐标包括第二x坐标及第二y坐标,其中该第二x坐标是从该视野的该边缘到该二级坐标的第二距离。使用该一级坐标及该二级坐标来估计理论线特征,及计算在该理论线特征与参考轴之间的线角度测量值。该测量工具被定位以测量光栅结构中的第二图像曝光。利用与用来测量该第一线角度的相同方法来测量第二线角度。计算该第一线角度与该第二线角度的差,以确定该线角度旋转,且将该线角度旋转被与设计规格线角度测量值进行比较。从该第一线角度与该第二线角度之间的差来确定拼接品质。
附图说明
8.因此,为了能详细了解本公开内容的上述特征的方式,可通过参照实施方式来获得上文所简要概述地本公开内容的更特定的说明,实施方式的一些绘示于附图中。然而,将注意附图仅图示示例性实施方式,而因此不应被认为限制其范围,可以允许其他同等有效的实施方式。
9.图1图示根据本公开内容的实施方式的波导组合器的平面图。
10.图2图示根据本公开内容的实施方式的由两个相邻图像曝光所形成的多个光栅的示意平面图。
11.图3图示根据本公开内容的实施方式的光栅和该光栅的测量特性的示意平面图。
12.图4图示根据本公开内容的实施方式的在两个相邻线特征之间的界面边界的示意图。
13.图5图示根据本公开内容的实施方式的用于确定光栅线的线角度的方法的操作。
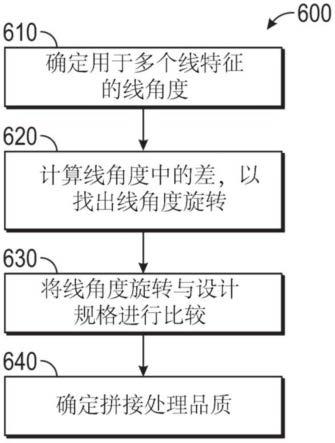
14.图6图示根据本公开内容的实施方式的用于确定光栅结构的拼接处理品质的方法的操作。
15.为促进理解,已尽可能使用相同的附图标记来指示图中共有的相同元件。可设想到一个实施方式中的元件及特征可在没有进一步赘述的情况下有益地并入其他实施方式中。
具体实施方式
16.本公开内容的方面涉及用于确定线角度及光栅结构的拼接品质的设备及方法。在一个示例中,线角度是通过测量沿着线特征的离散的坐标来确定的。另一例中,线角度旋转是通过测量多个相邻线光栅区段的线角度来确定的。
17.图1图示根据本公开内容的实施方式波导组合器100的平面图。将理解,以下描述的波导组合器100是示例性波导组合器,且具有不同设计的其他波导组合器可受益于本文中所描述的实施方式。波导组合器100包括由多个光栅108限定的输入耦合区102、由多个光栅110限定的中间区104、及由多个光栅112限定的输出耦合区106。多个光栅112的光栅区段
120位于输出耦合区106内。光栅区段120涵盖整个输出耦合区106的一小区段,且将在下文更详细说明。输入耦合区102从微显示器接收具有强度的光(虚拟图像)的入射光束。
18.多个光栅108的各光栅(诸如鳍片结构或类似者)将入射光束分离成多个模式,各光束具有一个模式。零阶模式(t0)光束被反射返回或被透射通过波导组合器100,正一阶模式(t1)光束通过波导组合器100耦合至中间区104,而负一阶模式(t-1)光束在波导组合器100中以与t1光束相反的方向传播。理想地,这些入射光束被分离成具有入射光束的全部强度的t1光束,以便将虚拟图像朝向中间区104引导。将入射光束分成具有这些入射光束的全部强度的t1光束的一种做法是运用鳍片(其包含光栅108),这些鳍片具有倾斜角以抑制t-1光束及t0光束。t1光束通过波导组合器100经历全内反射(tir),直到这些t1光束接触中间区104中的多个光栅110。输入耦合区102的一部分的可具有光栅108,其倾斜角不同于来自输入耦合区102的相邻部分的光栅108的倾斜角。
19.t1光束接触多个光栅110的鳍片。t1光束被分离成往回反射或透射通过波导组合器100的t0光束、在中间区104中经历tir直到接触多个光栅110的另一鳍片的t1光束、以及通过波导组合器100耦合至输出耦合区106的t-1光束。在中间区104中进行tir的t1光束持续接触多个光栅110的光栅,直到通过波导组合器100耦合至中间区104的t1光束的强度耗尽,或是直到通过中间区104传播的剩余t1光束到达中间区104的末端。
20.多个光栅110被调谐以控制通过波导组合器100耦合至中间区104的t1光束,以控制耦合至输出耦合区106的t-1光束的强度,从而调制从使用者的视角观察的产生自微显示器的虚拟图像的视野,以及增加使用者能观看到该虚拟图像的视角。一种控制通过波导组合器100耦合至中间区104的t1光束的作法是制造多个光栅110的各鳍片的倾斜角,以控制耦合至输出耦合区106的t-1光束的强度。中间区104的一部分的可具有光栅110,其倾斜角不同于来自中间区104的相邻部分的光栅110的倾斜角。此外,光栅110可具有鳍片,其倾斜角不同于光栅108的鳍片的倾斜角。
21.通过波导组合器100耦合至输出耦合区106的t-1光束在波导组合器100中经历tir,直到这些t-1光束接触多个光栅112的一个光栅为止,在该处这些t-1光束被分成往回反射或透射通过波导组合器100的t0光束。t1光束在输出耦合区106中经历tir直到接触多个光栅112的另一鳍片且t-1光束从波导组合器100耦合出(coupled out)。在输出耦合区106中经历tir的t1光束持续接触多个光栅112的鳍片,直到通过波导组合器100耦合至输出耦合区106的t-1光束的强度耗尽,或是直到通过输出耦合区106传播的剩余t1光束已到达输出耦合区106的末端。多个光栅112被调谐以控制通过波导组合器100耦合至输出耦合区106的t-1光束,以控制从波导组合器100耦合出的t-1光束的强度,从而进一步调制从使用者的视角观察的产生自微显示器的虚拟图像的视野,以及进一步增加使用者能观看该虚拟图像的视角。
22.一种控制通过波导组合器100耦合至输出耦合区106的t-1光束的作法是制造多个光栅112的各鳍片的倾斜角,以进一步调制视野并增加视角。中间区104的一部分可具有光栅110,其倾斜角不同于来自中间区104的相邻部分的光栅110的鳍片的倾斜角。此外,光栅112可具有鳍片,其倾斜角不同于光栅108和光栅110的鳍片的倾斜角。在一些实施方式中,108、110及112中的结构是2d图案,像是旋转的细长柱、过孔特征、或圆柱。
23.图2图示根据本公开内容的实施方式的由两个图像曝光形成的多个光栅112的示
意平面图。图2在图1中被图示成涵盖部分输出耦合区的光栅区段120。参考x坐标、y坐标、及z坐标来显示光栅区段120。多个光栅112包括光栅结构200。光栅结构200包括由第一图像曝光形成的第一组线特征204及由第二图像曝光形成的第二组线特征206。第一组线特征204及第二组线特征206在交界(junction)202处相交。交界202可被视为在处理期间两组线特征204、206结合在一起的点。交界202是由使用多个掩模或图像曝光以创建光栅结构200而产生的。
24.使用多个掩模来创建光栅结构200大幅降低掩模设计及制造的成本。已经进行了创建足够大的掩模来创建覆盖整个输出耦合区106的多个光栅112的一些尝试,但已使用单一掩模已经被证实是非常昂贵的。当前制造多个光栅112的方法运用多个掩模或重复使用相同掩模,以便对光栅结构200进行图案化。例如,光栅结构200被做成多个区段,其包括第一区段s1及第二区段s2。第一及第二区段s1、s2可经描述为图像曝光。第一区段s1包括第一组线特征204,而第二区段s2包括第二组线特征206。在一些实施方式中,使用额外的区段且这些额外的区段通过各区段之间的交界202而被拼接在一起。这些额外区段可被拼接在一起以组成输出耦合区106内的全部多个光栅112。上述关于多个光栅112和输出耦合区106的拼接处理可类似地应用至多个光栅108和输入耦合区102、或多个光栅110和中间区104。
25.各线特征204、206分别包括线角度θ1、θ2。第一线角度θ1被定义为第一组线特征204之内的多个光栅112与x轴之间的角度。第二线角度θ2被定义为第二组线特征206之内的多个光栅112与x轴之间的角度。代表性的线角度θ1及θ2被显示在区段s1及区段s2的各者的底部光栅上。然而,线角度θ1、θ2是从区段s1及区段s2中的多个光栅112的任一者找出的。在一些实施方式中,针对第一和第二区段s1、s2内的多个光栅112的各者找出个别的线角度θ1、θ2。据此,可针对各光栅获得相对于x轴的线角度测量值。对区段s1内的线角度测量值取平均以找出第一平均线角度。对区段s2内的线角度测量值取平均以找出第二平均线角度。
26.在替代实施方式中,相对于y轴来计算线角度θ1、θ2。可相对于线角度的相同平面之内的任何线或轴来找出这些线角度,只要针对全部的线角度测量值一致地使用该轴。一致地使用线或轴以作为参考线的做法是为了提供共同参考点使得能够在线角度测量值之间进行比较。
27.图3图示根据本公开内容的实施方式的光栅与该光栅的测量特性的示意平面图。图3进一步图示测量工具的视野300。在一些实施方式中,测量工具包括扫描式电子显微镜。视野300包括光栅结构。该光栅结构可类似图2中显示的光栅结构200。在该测量工具的视野300内是线特征302。该测量工具能够识别一个或多个线特征302。图3的线特征302可类似于针对图1及图2所描述的多个光栅112的任意者。尽管图3中仅显示一个线特征302,一般理解在给定时刻测量工具的视野300内将有多个线特征302。该测量工具是能够在各线特征302之间进行区分的测量工具组件的一部分,使得在视野300内有多个线特征302时,该测量工具能够锁定聚焦在一个线特征302上。该测量工具组件通过利用线追踪程序来在各线特征之间进行区分。该线追踪程序能够是控制器或计算机的一部分,其测量来自测量工具的数据。相关于图3所讨论的线特征302是线特征302的一个区段,诸如图2中的线特征204及206。图3中仅显示一个线特征302。在另一实施方式中(此处未显示),该线特征是细长棒状、圆柱、或过孔形状。
28.可利用沿通过线特征302的长端行进的中央轴的离散坐标点测量值来测量线特征
302。例如,这些离散坐标点测量值包括一级坐标320、二级坐标330、三级坐标340、及n级坐标350。该n级坐标是代表坐标序列中的、在三级坐标340之后的任何坐标。在一些实施方式中该n级坐标是四级坐标、五级坐标、六级坐标,或更大。图3中可能存在未示出的离散坐标点。坐标320、330、340、350位于测量区的中心处。一级坐标320位于第一测量区304的中心处。二级坐标330位于第二测量区306的中心处。三级坐标340位于第三测量区308的中心处。n级坐标位于第n个测量区310的中心处。沿着线特征302的起点可以是一级坐标320或是最靠近一级坐标320的线特征302与视野300的边缘的交点。替代地,该起点可以是在一级坐标320与最靠近一级坐标320的线特征302和视野300的边缘的交点之间的一点。从与线特征302相交的视野300的边缘到一级坐标320的距离少于大约500nm,诸如少于400nm,诸如少于300nm。在一些实施方式中,从与线特征302相交的视野300的边缘到一级坐标320的距离在大约300nm到大约400nm之间,诸如大约350nm。在一些实施方式中,从与线特征302相交的视野300的边缘到该起点的距离少于大约400nm,诸如少于大约350nm,诸如少于大约250nm,或诸如少于150nm。
29.在一些实施方式中,一级坐标320、二级坐标330、三级坐标340、及n级坐标350能够全部相对于x轴及y轴来测量。该x轴及该y轴可以是使用者所选择的任何x-y参考轴。在此实施方式中,一级坐标320包括第一x坐标及第一y坐标,且该第一x坐标是从视野300的边缘到一级坐标320的第一距离。在此实施方式中,y轴和x轴的原点是视野300的边缘。包括有y轴的视野300的边缘是平行于线特征302的边缘。该y轴也可在z轴上的相同平面内。该一级坐标的y坐标是沿着该y轴的任意y坐标。
30.二级坐标330包括第二x坐标及第二y坐标,且该第二x坐标是从视野300的边缘到二级坐标330的第二距离。第二x坐标及第二y坐标是利用被用来找到第一x坐标与第一y坐标的相同x轴与y轴来找到的。
31.三级坐标340包括第三x坐标及第三y坐标,且该第三x坐标是从视野300的边缘到三级坐标340的第三距离。第三x坐标及第三y坐标是利用被用来找到第一x坐标与第一y坐标的相同x轴与y轴来找到的。
32.n级坐标350包括第n个x坐标及第n个y坐标,且该第n个x坐标是从视野300的边缘到n级坐标350的第n个距离。第n个x坐标及第n个y坐标是利用被用来找到第一x坐标与第一y坐标的相同x轴与y轴来找到的。
33.一级坐标、二级坐标、三级坐标、及n级坐标的各者是相对于彼此且利用相同x轴与相同y轴来找到的。替代方法可运用x-y轴以外的坐标系,诸如径向坐标系。
34.第一间隔距离312是第一测量区304与第二测量区306之间的距离。第二间隔距离314是第二测量区306与第三测量区308之间的距离。在一些实施方式中,第一间隔距离312和第二间隔距离314为相同距离。替代地,第一间隔距离312和第二间隔距离314为不同距离,使得第一间隔距离312小于第二间隔距离314。在另一实施方式中,第一间隔距离312大于第二间隔距离314。
35.在各测量区之间可以存在后续的间隔距离,直到第n个测量区310为止。在此实施方式中,各测量区之间的间隔距离312、314等等能够是相同距离或不同距离。在一些实施方式中,各测量区之间的距离在第一间隔距离312及第二间隔距离314之间交替。在一些实施方式中,各测量区304、306、308、及310之间的间隔距离312、314在大约200nm及大约2000nm
之间。例如,各测量区304、306、308、及310之间的间隔距离312、314在大约500nm与大约1500nm之间,诸如在大约750nm与大约1250nm之间。在一些实施方式中,各测量区304、306、308、及310被视为感兴趣区域。在图3绘示的实施方式中,测量区304、306、308、及310是测量方块,其中这些测量方块有形成封闭平行四边形的两组平行线。
36.所利用的另一测量值是内区长度318。内区长度318是从坐标320、330、340、及350到测量区304、306、308、及310的与线特征302垂直的边缘的距离。例如,内区长度318是从一级坐标320到第一测量区304的垂直于线特征302边缘的距离。此内区长度318可取自垂直于线特征302的两侧的任一侧。不管取自第一测量区304的哪一边缘,内区长度318都将为相同的,因为一级坐标320位于测量区304的中心。当测量区304的边缘垂直于线特征302时,内区长度318的两倍是从第一测量区304的边缘到测量区304的相对边缘的距离。能利用相同方法来测量其他测量区306、308、310的任意者内的内区长度318。在一些实施方式中,内区长度318对于全部测量区304、306、308、310和坐标320、330、340、350而言是相同的。
37.能够以不同组合的方式将该内区长度与间隔距离312及314加一起,以代表一个坐标点到另一坐标点之间的总距离。在一个实施方式中,一级坐标320与二级坐标330之间的总距离是第一间隔距离312加上内区长度318的两倍。二级坐标330和三级坐标340之间的总距离是第二间隔距离314加上内区长度318的两倍。此关系对于全部后续的坐标点之间的距离是相同的。
38.在一些实施方式中,各组相邻坐标点之间的总距离是相同的。各组相邻坐标点之间的总距离可被预先设定或由被编程以确定测量距离的控制器自动确定。在各示例中,能够存在用于内区长度318的预先设定距离。在一些实施方式中,内区长度318被预先设定而间隔距离312和314有所变化。间隔距离312和314可自动变化以减少噪声,或者可具有预设的变化模式。在一些实施方式中,间隔距离312和314在各测量区之间变化,以便优化相对于整个线特征302的测量位置。据此,能够在线特征302上的特定范围内进行测量。例如,可能不期望在靠近线特征302的边缘处进行测量。使用者可能希望在距离各组线特征302的边缘设定距离处取得数据。
39.在一些实施方式中,一组相邻坐标之间的总距离在大约200nm与大约2000nm之间,例如,在大约500nm、和大约1500nm之间,诸如在大约750nm与大约1250nm之间。在一些实施方式中,一组相邻点之间的总距离趋近1000nm。
40.也可确定可变距离316。可变距离316是在沿着线特征302的任意给定点处从参考轴到线特征302的距离。在一些实施方式中,可变距离316被描述成沿着线特征302的点的x坐标。该参考轴是平行于线特征302且在线特征302的相同平面内的任意轴。在一些实施方式中,该参考轴是视野300的平行于线特征302的边缘。在又一实施方式中,该参考轴可以是平行于线特征302的任意轴,只要在测量沿着线特征302的区段的全部点时都使用相同的轴。在一些实施方式中,可针对线特征302的一个区段与线特征的另一区段使用相同参考轴。在此实施方式中,用于图2的区段s1的参考轴将是用于图2的区段s2的相同参考轴。在一些实施方式中,参考轴可能是用于区段s1的参考轴,而不同于用于区段s2的参考轴。然而,这两个参考轴互相平行。
41.针对沿着线特征302的各坐标点找到可变距离316,使得在参考轴与一级坐标之间找到第一可变距离,在参考轴与二级坐标之间找到第二可变距离,在参考轴与三级坐标之
间找到第三可变距离,并在参考轴与n级坐标之间找到第n个可变距离。
42.如图3中所示,线特征302是2d线特征360。2d线特征360能够是旋转细长柱、圆柱、通孔特征、或任何其他适当的2d图案。在此实施方式中,图3中显示的线特征302是2d线特征360的中央轴。图3中2d线特征360被显示为矩形,但一般理解2d线特征360是任何二维形状。该二维形状包括旋转细长柱、圆柱、及通孔特征。在其中线特征302为2d线特征360和被测量的线特征302为2d线特征的中央轴的实施方式中,该中央轴平行于2d线特征360的长度370。2d线特征360的长度370被进一步定义为2d线特征360的长边缘。
43.图4图示根据本公开内容的实施方式的在两个相邻线特征302之间的界面边界的示意图。界面边界400包括相邻的两组线特征302及在相邻的两组线特征302之间的交界点410。相邻两组线特征302可类似于图2的第一组线特征204和第二组线特征206。类似于图2,如图2中所示,第一及第二组线特征204及206被分组为区段1s1及区段2s2。
44.示例界面边界400具有第一区段及第二区段,该第一区段具有第一区段长度406,该第二区段具有第二区段长度408。第一区段长度406和第二区段长度408趋近于或等于从一组线特征302的第一端420上的一个交界点到同一组线特征302的第二端422上的另一交界点(未图示)的距离。交界点410是两组线特征302相会的点。各组线特征302具有一组测量点402及404。区段s1包括测量点402而区段s2包含测量点404。测量点402和404是一级坐标320、二级坐标330、三级坐标340、及n级坐标350以及其之间的点中的任一者。测量点402及404的各者具在图4中示出的参考箭头集合416及418,以显示测量点402及404的各者在水平轴上上的位置。第一参考箭头集合416被显示在区段s1中,而第二参考箭头集合418被显示在区段s2中。参考箭头416及418被定向为垂直于线特征302。
45.通过取交界点410与第一组测量点402的第一点之间的距离来计算第一边缘距离412。第一组测量点402的第一点能被定义为第一组测量点402中最靠近交界点410的点。通过取交界点410与第二组测量点404的第一点之间的距离来计算第二边缘距离414。第二组测量点404的第一点能被定义为第二组测量点404中最靠近交界点410的点。这能够通过观察交界点410及参考箭头集合416及418而更简单地看到。测量点402、404与参考箭头集合416、418之间的第一交点能被测量为第一及第二边缘距离412、414。
46.第一边缘距离412及第二边缘距离414可在大约100nm及大约500nm之间的范围中,诸如在大约200nm与大约400nm之间。在一个实施方式中,第一边缘距离412或第二边缘距离414中的任一者为大约350nm。一般不在距离交界点410的第一边缘距离412之内或距离交界点410地第二边缘距离414之内进行测量。这是因为在界面边界400的此范围内的点包含大量噪声及变异。这种噪声会严重扭曲了从测量点402和404收集的数据。第一边缘距离412和第二边缘距离414被选择以减少噪声,同时仍保有准确的测量结果。
47.将注意,尽管图4中显示了18个测量点402、404,但可利用其他个数的测量点402、404。可使用的最小数目的测量点402、404是两个测量点402、404。测量点402、404的数目在大约两个测量点402、404及大约50个测量点402、404之间。测量点402、404的数目可通常被描述为多个测量点402、404。在一个示例中,测量点402、404的数目被增加以获得更大量的数据。
48.图5图示根据本公开内容的实施方式的用于确定光栅线的线角度的方法500的操作。操作510包括利用测量工具以追踪线特征。该测量工具可以是扫描式电子显微镜。该线
特征可以是如上述且显示在图1及图2中的光栅112。该线特征也可以是一组线特征204及206。在此实施方式中,可在任何给定时刻追踪多个线特征。该线特征也可以是如上所示并在图3和图4图描述的线特征302。
49.在操作520,设定各感兴趣区域之间的距离。在当前实施方式中,感兴趣区域是参照图3所讨论的测量区304、306、308、及310。各感兴趣区域之间的距离可以是第一间隔距离312抑或第二间隔距离314。各感兴趣区域之间的设定距离被预先确定,以便进行足够数量的测量来确保正确的测量结果。
50.在操作530,沿着线特征找出cx及cy值。cx及cy值与各坐标点的x坐标与y坐标相等或大致相等。其包括一级坐标、二级坐标、三级坐标、及n级坐标,使得有至少三个或更多个坐标点被测量。能相对于任何x-y轴找到cx及cy值,只要针对该线特征的全部坐标测量一致地使用这些轴。
51.在操作540,利用操作530中找出的该组坐标点找到线特征的斜率及线角度。该组坐标点被利用在计算机或控制器内绘制理论线特征的图形。利用在该计算机或控制器装置内的数学公式或程序计算该理论线特征的斜率。在一些实施方式中,在图形化多个理论线特征之后计算单一区段内的多个线特征的斜率。若计算了多个理论线特征的斜率,计算该多个理论线特征的斜率的平均值,以创建平均理论线特征斜率。
52.各理论线特征的线角度也能利用该斜率来计算。利用计算机或控制器内的数学公式及程序计算各理论线特征的线角度。
53.如上提及的,利用来自单一线特征、或一组线特征的测量值是可行的。利用来自单一线特征的测量值的一个优点是,来自单一线特征的测量值更有效且利用较少处理功率来完成这些测量。利用来自一组线特征的测量值的优点是,能将测量值取平均,这可提供更准确及可靠的测量值。
54.图6图示根据本公开内容的实施方式的用于确定光栅结构的拼接处理品质的方法600的操作。操作610包括确定针对两个分离线特征的线角度,操作620包括计算在第一及第二线特征之间线角度的差,以找出线角度旋转,操作630包括将该线角度旋转与设计规格做比较,而操作640包括确定拼接处理品质。
55.于操作610,计算用于多个线特征的线角度。线角度的计算包括找出用于两个线特征(若取一个区段内的平均线特征斜率,则会是多个额外线特征)的线角度。利用方法500中描述的方法确定这些线角度。操作610与方法500不同处在于,测量并计算针对多个相邻区段中直线的斜率及线角度。针对第二组的三个或更多个坐标,必须第二次完成方法500中描述的步骤,第二组的三个或更多个坐标是从分离、但相邻的线特征区段中的第二线特征找出的。
56.在操作620,计算第一区段的线特征的第一线角度与第二区段的线特征的第二线角度之间的差。在操作620中,通过将第一或第二线角度的一者与另一者相减来获得该差。第一及第二线角度之间的差的结果被定义为线角度旋转。
57.在操作630,将在操作620中找出的线角度旋转与设计规格进行比较。该设计规格能够是在光栅中所允许的最大线角度旋转。在一些实施方式中,该设计规格能够小至1/100度或更小,诸如1/250度或更小,1/500度或更小,或1/1000度或更小。通过确定所计算的线角度旋转是否小于该设计规格、大于该规格、或趋近于等于该规格来比较该线角度旋转及
该设计规格。
58.在操作640,确定拼接处理的品质。线角度旋转相较于该设计规格的程度确定了拼接处理品质。能在任何指定的尺度上确定拼接处理品质。在一些实施方式中,拼接品质能够是通过或不合格的决策,使得若线角度旋转小于该设计规格,则拼接处理品质被认为足以通过。若线角度旋转大于该设计规格,则拼接处理品质被认为是不合格。操作640能在计算机上计算完成并显示在或数字界面显示器上,或者操作640能由人工核查拼接处理是否落在预期设计规格之内来完成。也可设想其他确定拼接处理品质的方法,诸如在1~100%或1~10的尺度上对拼接处理品质进行分级。
59.通常理解以上说明中引用的线特征在某些实施方式中可以是二维线特征。例如,线特征204、206、302、及360可以是2d线特征。
60.尽管以上涉及本公开内容的实施方式,可在不背离本公开内容的基本范围的情况下设计出本公开内容的其他及进一步实施方式,且本公开内容的范围由随附的权利要求书所确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1