一种基于优化鱼群算法的管道连接器的检测方法
1.本发明管道检测技术领域,尤其涉及一种管道连接器检测方法。
背景技术:
2.管道是实现油、气或水等资源运输的最有效、便利和安全的方式。随着大量先前铺设的管道已达到或超过服役期,由管道泄漏带来的环境污染及经济损失是非常严重的,甚至管道爆炸造成的安全威胁更是难以估量。管道内检测机器人是在管道内实现管道缺陷检测及缺陷定位最有效的工具,已成为各类管道周期性检测的首选。
3.通常而言,管道是由直管道段通过管道连接器(弯管、环形焊缝和法兰等)连接而成的。管道连接处大都采用焊接或螺丝进行连接,在长期的地下环境中易于腐蚀甚至破裂。此外,管道内检测机器人在直管道内具有方位角和俯仰角不变的特性,可用于修正管道定位系统的方位角发散误差,提高管道检测定位系统的精度。但是,此方法实现的前提就是实现对管道连接器的正确检测,并确定其具体坐标位置。
4.公开号为cn201710414171.2的中国发明专利提出了一种基于复连续小波变换的管道连接器检测方法,该检测方法的检测精度不足;公开号为cn201710331931.3的中国发明专利提出了一种基于快速正交搜索算法的管道连接器,该检测方法的检测速度慢。
5.人工鱼群算法(artificial fish swarm algorithm,afsa)是一种基于动物行为的全局搜索算法。它是利用动物自治体模型的一种全局寻优算法。从构造鱼的简单行为出发,通过人工鱼个体的局部寻优行为,最终在群体中使全局最优值显现出来,是群智能思想的一个具体应用。其主要特点是无需了解问题的特殊信息,只需对问题进行优劣比较,并有着较快的收敛速度。人工鱼群算法已成功应用在信号处理、神经网络分类、数据挖掘及分类和多目标优化等方面取得了很好的实践效果。
技术实现要素:
6.针对现有技术中所存在的不足,本发明提供了一种基于优化鱼群算法的管道连接器的检测方法,其解决了现有技术中存在的管道连接器检测精度不足和检测速度慢的问题。
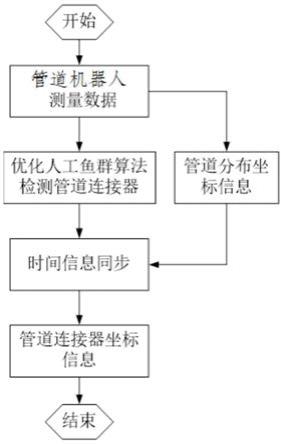
7.根据本发明的实施例,本发明提出了一种基于优化鱼群算法的管道连接器的检测方法,其包括以下步骤:
8.通过带有惯性测量单元的管道机器人获取管道内的测量数据;
9.采用人工鱼群算法进行测量数据从时域到频域的变化,得出对应的信号时频特性曲线;
10.通过变换后的时频特性曲线幅值判断整个被检测管道中的直管道段和管道连接器所对应的时间段;
11.采用捷联微惯性导航算法解算测量数据,确定管道的位置信息;
12.将管道连接器所对应的时间段和管道位置信息做时间同步处理,得出管道连接器
的位置信息;
13.在通过人工鱼群算法变化测量数据时,视野和步长随着迭代次数增加而逐渐缩小。
14.本发明的技术原理为:本发明基于鱼群算法处理惯性测量单元的测量数据,得到测力量数据的时频特性曲线,之后通过对测量数据的阈值筛选就能够得到管道连接器在时频特性曲线中的位置;再通过测量数据解算出管道机器人的空间位置,进而得出管道的位置信息,进行时间同步就能够得到管道连接器的位置。
15.相比于现有技术,本发明具有如下有益效果:本发明通过鱼群算法结合视野和步长的逐渐减小的方式,在起始阶段视野和步长均较大,全局搜索能力较强,收敛速度较快;随着算法的进行,迭代次数的增加,算法的视野和步长逐渐减小,局部搜索能力逐渐增强,算法精度逐渐提高,保证了管道连接器检测的快速和准确。
附图说明
16.图1为本发明实施例的管道机器人结构的简易视图。
17.图2为本发明管道连接器的检测流程图。
18.图3为管道位置信息解算流程图。
19.图4为管道连接器定位流程图。
20.图5为优化鱼群算法流程示意图。
21.上述附图中:1、电源模块;2、支撑轮;3、密封圈;4、惯性测量单元;5、数据处理单元;6、数据存储单元;7、里程仪;8、图像采集模块。
具体实施方式
22.下面结合附图及实施例对本发明中的技术方案进一步说明。
23.如图1所示,本发明提供了一种基于优化鱼群算法的管道连接器的检测方法。为保证本发明的可实施性,本发明采用小径管道机器人,其包括电源模块1、支撑轮2、密封圈3、惯性测量单元4、数据存储单元6、图像采集模块8和至少三个轮子上设有里程仪7。电源模块1、惯性测量单元4、数据处理单元5、数据存储单元6依次固定安装在小径管道检测机器人主体内,由外侧前后对称的两个密封圈3固定为一个整体。所述电源模块1为多里程仪小径管道检测机器人提供电能,保证其能正常工作遍历全部待测管道。所述惯性测量单元4用于测量小径管道检测机器人在管道内运用的三轴正交角速率和三轴正交线加速度,用于捷联惯性导航算法解算。所述数据处理单元5和数据存储单元6分别用于里程仪7和惯性测量单元4数据并进行简单的处理和有效的存储。由于实际的管道测绘工程中的城市地下管网的管道长度通常可达到几十甚至几百公里,在这种条件下如果采用串行的通信方式会因为距离的限制而导致很难完成数据的传输工作,同时由于城市地下管网恶劣的环境,也无法采用无线的信号收发装置。因此本发明的实施方式中考虑使用大容量的存储器完成实施测量数据的存储工作,采集的数据包括惯性测量单元数据、里程仪数据信息。
24.所述密封圈3有多个且分别位于所述电源模块1、惯性测量单元4、数据处理单元5、数据存储单元6的前后两侧,用于保证主体内的电源模块1、惯性测量单元4、数据处理单元5、数据存储单元6等电子元器件的正常工作,防止管内物质进入到小径管道检测机器人的
主体内腔中。所述里程仪7分别位于四个支撑轮2上,用于测量小径管道检测机器人在管内运动的轴向速度和距离。同时由于小径管道检测机器人在管内运动时与轴向垂直平面内运动速度为零,结合姿态角(横滚角、纵摇角和方位角)信息可计算出小径管道检测机器人在导航坐标系下的三维速度值,通过三维速度值再进行积分可以得到三维位置的变化值,从而得到小径管道检测机器人的三维坐标信息。
25.管道机器人采用缆绳拖曳的方式前进移动,在不考虑小径管道检测机器人发生侧滑的前提下,我们可以通过控制缆绳拖曳速度进而控制小径管道检测机器人在管内的运动。由于管内情况的复杂性以及考虑到可能发生的管内存在杂物等突发情况,会导致测量的加速度值发生突变,因此对小径管道检测机器人的行进加速度也要加以控制。管内运动姿态测量系统测得的数据包括姿态角和各轴角速度,这些数据是做状态估计所必需的参数,通过对小径管道检测机器人行进过程中陀螺仪和加速度计输出的数据进行采集和检测,再利用捷联惯性导航算法解算得到对应的姿态角和航向信息,同时通过控制支撑轮2的轮速用以保证小径管道检测机器人的横滚角不小于三十度。
26.上述方案中仅仅为实施本发明的方法的实施提供一种可行的装置体现本发明方法的可实施性,本领域技术人员在本发明所提出的方法的思路下,也可以采用其他常规方式测量相关数据,上述装置并不对本发明所提出的方法构成具体限制。
27.本发明包括如下步骤:
28.通过带有惯性测量单元的管道机器人获取管道内的测量数据;测量数据主要包括惯性测量单元测量的测量机器人的三轴姿态角和三轴加速的数据。当管道内检测机器人完成整个被检测管道的检测并回到管道接收器后,从管道内检测机器人的数据存储单元中下载并保存管道测量数据。
29.采用人工鱼群算法进行测量数据从时域到频域的变化,得出对应的测量数据的时频特性曲线。具体为:对管道内检测机器人内加速度计在管道内的测量数据采用优化人工鱼群算法进行信号从时域到频域的变换,得出对应的信号时频特性曲线。再通过变换后的时频特性曲线幅值判断整个被检测管道中的直管道段和管道连接器所对应的时间段。具体可采用以下方式判断:
30.设定静止状态下陀螺仪输出角速率的平方和作为阈值(陀螺仪在静止时测量值还有器件本身的噪声和漂移,不为零),当三轴陀螺仪任意轴测量的旋转角速率测量值大于阈值,则判定管道内检测机器人正通过弯曲管道段,否则判定管道内检测机器人正通过直管道段。同时,由加速度计在管道内检测机器人内随着管道运动的测量信号用于判断环形焊缝和法兰等管道连接器。当时频特性曲线幅值大于设定阈值时,对应的时间段为环形焊缝或法兰,而当时频特性曲线幅值小于设定阈值时,对应的时间段即为直管道段。与此同时,管道内检测机器人内陀螺仪测量数据用来判断管道内检测机器人是否通过某段弯管,将弯曲管道从整个被检测管道中分离出来。最后,将陀螺仪检测的弯管道段与加速度计检测出来的环形焊缝或法兰等进行合并,实现整个管道连接器的检测。本发明通过鱼群算法得出时频特性曲线后,简单的通过阈值设定就能够区分出管道连接器的信息。
31.在通过人工鱼群算法解算时,视野和步长随着迭代次数增加而逐渐缩小。具体公式为:
[0032][0033]
其中,g表示当前迭代次数,g
max
表示最大迭代次数,α是个衰减函数,visual表示人工鱼的视野长度,step表示人工鱼的步长,visual
min
表示最小视野长度,step
min
表示最小步长。本发明通过设定最小视野长度和最小步长,保证最终数据的精确性;当数据量大,迭代次数较多时,初始的视野长度和步长足够大保证效率;当数据量小,迭代次数较少时,初始视野长度和步长不会比最小视野长度和最小步长大多少,减小疏漏。
[0034]
管道内安装的测量数据不仅用于管道连接器的检测,同时还用于被检测管道地理坐标位置的计算。如图2所示,三轴陀螺仪和三轴加速度计分别敏感管道内检测机器人在管道内运动时的旋转角速率和线性加速度。在初始条件已知的状况下,采用捷联微惯性导航算法可以计算出管道内检测机器人在管道内运动的姿态、速度和位置信息。由于惯性测量单元本身的测量误差,会导致捷联微惯性导航系统输出误差随着管道检测距离的增长而增大。由里程仪测量的轴向速度和管道内检测机器人在管道内的非完整性约束提供三维速度,管道连接器检测在直管道段提供方位角和俯仰角,以及地表磁标记提供三维位置,在kalman滤波估计的作用下可估计出惯性测量单元误差和捷联微惯性导航系统误差,这些误差可以反馈并提高管道定位系统精度。此外,由于管道检测与维护的非实时性特性,可以采用数据平滑处理技术离线估计系统误差,再次提高管道定位系统精度。最终,得出精确的整个的管道地理坐标值。申请人在申请号为2020116333429的中国发明专利中,也对如何定位管道机器人做了详细阐述。
[0035]
由于二者采用了同一套管道内的测量数据,由此检测出的管道连接器和管道定位系统具有时间信息同步特性。管道连接器检测的输出是时间和管道连接器的关系,而管道机器人的定位系统的输出是时间和管道坐标位置的关系,通过管道连接器所对应的时间段和管道机器人地理位置信息做同步处理,得出管道连接器的地理位置信息。
[0036]
常年埋藏在地下或水下的管道由于其管道连接器处大部分为焊接等进行连接的,连接处与附近的泥土和水中的化学物质容易发生腐蚀,甚至破裂。因此,管道连接器成了管道泄漏的高危区域。此外,管道内检测机器人上搭载的管道检测传感器能有效的检测出直管道及管道连接器处的腐蚀及破裂状况。这样,管道连接器检测结果能为管道维修和开挖时提供便利。
[0037]
本发明中基于优化人工鱼群算法的管道连接器检测无需任何额外的硬件成本。管道连接器检测的实现不需要在管道内检测机器人中安装或添加其他任何传感器,用于检测的信号是对管道检测定位用惯性测量单元的测量数据的再次利用。此外,管道检测中对管道缺陷的维护是在管道检测完成之后进行的,无需同时进行,故对管道测量数据的分析、管道连接器检测和管道定位系统计算管道地理坐标都是离线进行的,故不会对现有的管道检测及完整性管理系统产生影响。
[0038]
如图3所示,在具体采用人工鱼群算法时,采用如下步骤:
[0039]
s21:设置人工鱼群的种群数目n,人工鱼的最小视野长度visual
min
,最大迭代次数g
max
,拥挤度因子δ、最小步长step
min
、衰减函数α和终止条件。
[0040]
s22:随机设置n条人工鱼个体,并形成初始的人工鱼群。
[0041]
s23:计算各条人工鱼的食物浓度,得出适应函数和最优人工鱼个体。
[0042]
s24:对所有的人工鱼的状态进行评价,确定要执行的行为,包括随机行为、聚群行为、觅食行为和追尾行为;执行后,更新人工鱼的个体状态。
[0043]
s25:根据最优行为选择最佳人工鱼状态。
[0044]
s26:判断是否满足算法终止条件,若不满足则跳至s22,若满足则跳出参数寻优过程。
[0045]
在一片水域中,鱼数目最多的地方一般是本水域中含营养物质最多的区域,故该算法依据这一自然规律来模拟鱼群的觅食行为实现目标地寻优。人工鱼个体的状态用向量表示为:x=(x1,x2,l,x
n
),其中x
i
(i=1,2,l,n)为欲寻优参数。人工鱼所处位置的食物浓度值用y=f(x)表示,其中y为寻优指标,即适应度函数。两条人工鱼之间的距离为d
ij
=||x
i
‑
x
j
||;人工鱼个体的感知距离用visual表示;人工鱼的运动步长用step表示;δ表示拥挤度因子。鱼类行为主要由觅食行为、聚群行为、追尾行为和随机行为等生活习性组成:
[0046]
觅食行为:当鱼发现食物之后,会立刻朝着食物浓度逐渐增加的方向快速聚集。设人工鱼的当前状态为x
i
,并在感知距离内随机选取一个状态x
j
,若食物浓度y
i
<y
j
(这是求极大值问题的判断标准,若求极小值,则y
i
>y
j
,由于求极值问题可以相互转化,以下按求极大值问题进行讨论),则向该方向运动一步;反之,再重新随机选择状态x
j
,并判断x
j
是否满足前进条件。反复尝试几次后,如果仍不满足人工鱼移动条件,则随机移动一步。觅食行为数学描述如下:
[0047][0048]
聚群行为:为了保证鱼群躲避危害且利于生存,游动过程中的鱼会自然地集结成群,形成一种群体性生活习惯。设人工鱼的状态为x
i
,探索当前邻域内(即d
ij
<visual)的伙伴数目n
f
及中心位置x
c
,如果y
c
/n
f
>δy
i
,表明伙伴中心有较多的食物且不太拥挤,则鱼朝伙伴中心位置方向前进一步。若反复尝试几次后仍不满足移动条件,则执行觅食行为。聚群行为数学实现如下:
[0049]
若y
c
/n
f
>δy
i
,则
[0050]
追尾行为:鱼群运动过程中,当其中某个或某几个个体发现食物时,其邻近的鱼会跟随其快速抵达食物点。若当前人工鱼的状态为x
i
,搜索当前邻域内(即d
ij
<visual)y
j
最大的伙伴状态x
j
,且y
j
/n
f
>δy
i
,则伙伴x
j
的状态对应的食物浓度值较高并且x
j
周围不太拥挤,故朝伙伴x
j
的方向移动一步。若多次尝试后仍不满足移动条件,则执行觅食行为。追尾行为数学描述如下:
[0051]
若y
j
/n
f
>δy
i
,则
[0052]
随机行为:人工鱼在其视野范围内随机选择某个状态,并向该方向运动,它是觅食行为的缺省行为。在觅食行为中,当重复尝试次数较少时,为人工鱼个体提供了随机运动的机会,增强了鱼群的多样性,从而保证能跳出局部极值。
[0053]
参数的具体设置数值,根据测量数据的体量确定,这由管道本身条件决定,本领域可根据具体管道情况,结合算法的应用方式进行合理选择。
[0054]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1