一种可测量目标倾角的激光测距仪的制作方法
1.本发明涉及角度测量设备技术领域,具体是涉及一种可测量目标倾角的激光测距仪。
背景技术:
2.激光测距仪,是利用调制激光的某个参数实现对目标的距离测量的仪器。激光测距仪测量范围为3.5~5000米。
3.按照测距方法分为相位法测距仪和脉冲法测距仪,脉冲式激光测距仪是在工作时向目标射出一束或一序列短暂的脉冲激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。相位法激光测距仪是利用检测发射光和反射光在空间中传播时发生的相位差来检测距离的。激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一,右图中,为典型的相位法测距仪和脉冲法测距仪图。
4.但是目前现有的激光测距仪仅能检测目前物体与自身的距离,无法去测量两者之间的角度,所以需要提出一种可测量目标倾角的激光测距仪,可以测量目标与观测者之间的距离,还可以对两者之间的角度进行测量,并且能对激光测距仪的水平角度进行调节。
技术实现要素:
5.为解决上述技术问题,提供一种可测量目标倾角的激光测距仪,本技术方案可以测量目标与观测者之间的距离,还可以对两者之间的角度进行测量,并且能对激光测距仪的水平角度进行调节。
6.为达到以上目的,本发明采用的技术方案为:一种可测量目标倾角的激光测距仪,包括:激光测距仪;包括:玻璃幕板;纵向调节机构,设置于玻璃幕板上,激光测距仪设置于纵向调节机构的输出端,纵向调节机构用于驱动激光测距仪进行纵向移动;倾角调节机构,玻璃幕板设置于倾角调节机构的输出端,倾角调节机构用于驱动玻璃幕板进行倾斜角度调节;水平角调节机构,倾角调节机构设置于水平角调节机构的顶部,水平角调节机构用于驱动倾角调节机构进行水平角度调节;驱动载体,水平角调节机构设置于驱动载体的顶部,驱动载体用于驱动激光测距仪、玻璃幕板、纵向调节机构、倾角调节机构和水平角调节机构进行移动。
7.优选的,纵向调节机构包括:底座,设置于玻璃幕板的正面,底座上设有纵向滑槽;
滑动块,设置于底座上并与滑槽滑动连接,激光测距仪设置于滑动块上;螺纹杆,设置于底座上并与其可转动连接,螺纹杆与滑动块螺纹连接;第一伺服电机,设置于底座上,第一伺服电机的输出端与螺纹杆连接。
8.优选的,倾角调节机构包括:座体,设置于水平角调节机构的顶部,座体的顶部设有铰接座;连动杆,设置于玻璃幕板的底部并与其固定连接,连动杆与铰接座可转动连接;小量角器,设置于座体的一侧,玻璃幕板的侧壁设有指针;倾角驱动组件,设置于座体的一侧,倾角驱动组件的输出端与连动杆连接。
9.优选的,倾角驱动组件包括:蜗轮,设置于连动杆的受力端;蜗杆,蜗杆的一端与座体侧壁可转动连接,蜗杆与蜗轮啮合;第一驱动柄,设置于蜗杆的受力端。
10.优选的,倾角调节机构还包括:背撑组件,对称设置于玻璃幕板的背面,背撑组件用于稳固玻璃幕板的结构;背撑组件包括:导向杆,导向杆的一端与玻璃幕板的背面铰接;套筒,设置于水平角调节机构的非工作部并与其铰接,导向杆与套筒滑动连接;第一弹簧,设置于套筒的内部,第一弹簧的输出端抵触导向杆。
11.优选的,水平角调节机构包括;内齿圈,座体的一侧设有圆环,设置于座体的圆环内并与其固定连接;驱动杆,驱动杆的一端设有第一齿轮,驱动杆的另一端设有第二驱动柄;底板,设置于驱动载体的顶部,座体的圆环处于底板可转动连接,座体的底部设有凸柱,底板的顶部设有弧形槽,凸柱与弧形槽滑动连接;弹性组件,设置于底板的顶部,圆环上设有指针,指针指向弹性组件。
12.优选的,水平角调节机构还包括:弹性组件,有三个,三个弹性组件呈三角排列状设置于大量角器的底部。
13.优选的,弹性组件包括:限位杆,设置于底板的底部;限位筒,设置于底板的顶部,限位杆插入限位筒内部并与其滑动连接;第二弹簧,设置于限位筒的内部,第二弹簧的两端分别抵触限位杆和底板。
14.优选的,驱动载体包括:车架;滚动轮组,设置于车架的尾部;转向轮组,有两个,两个转向轮组设置于车架的头部;转向驱动组件,设置于车架上,转向驱动组件的输出端分别与两个转向轮组的受力端连接;主动杆,设置于车架的尾部,主动杆的受力端与转向驱动组件的受力端连接,主动杆的受力端设有方向盘。
15.优选的,转向驱动组件包括:
齿条,设置于车架的内部,齿条的两端分别与两个转向轮组的受力端连接;转向杆,设置于车架的内部并与其可转动连接;第二齿轮,设置于转向杆的一端,第二齿轮与齿条啮合;万向节,设置于转向杆的另一端,主动杆的输出端与万向节连接。
16.本发明与现有技术相比具有的有益效果是:首先工作人员通过驱动载体驱动本设备移动至工作地点,然后将激光测距仪的输出端朝向目标物体,纵向调节机构开始工作,纵向调节机构的输出端驱动激光测距仪处于合适的高度,此时需要确定激光测距仪与目标物体的水平角度处于一致,激光测距仪开始工作,激光测距仪的输出端发射光线给目标物体,目标物体将光线反射回来,根据光点处于玻璃幕板上的位置对水平角调节机构进行调节,水平角调节机构的输出端带动倾角调节机构进行水平角度的转动,直至玻璃幕板上的光点与激光测距仪处于同一纵向线上,由于玻璃幕板的初始角度为九十度垂直状态,所以此时需要根据激光测距仪是否接收到发出的光线,来初步确定目标物体的平面是否也为九十度垂直状态,如果激光测距仪没有接收到发出的光线,工作人员根据光线反射到玻璃幕板上的位置来调节倾角调节机构,倾角调节机构驱动玻璃幕板进行倾角转动,玻璃幕板通过纵向调节机构带动激光测距仪随其移动,直至激光测距仪接收到反射的激光,此时通过激光测距仪计算出距离目标物体的距离,再根据倾角调节机构反馈的信息得知目标物体的倾斜角度;1、通过水平调节机构的设置,可以对激光测距仪的水平发射角度进行调节;2、通过本设备的设置,可以测量目标与观测者之间的距离,还可以对两者之间的角度进行测量,并且能对激光测距仪的水平角度进行调节。
附图说明
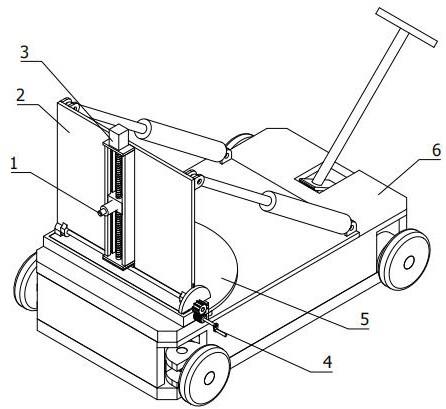
17.图1为本发明的立体结构示意图一;图2为本发明的立体结构示意图二;图3为本发明的激光测距仪、玻璃幕墙、纵向调节机构、倾角调节机构和水平角度调节机构的主视图;图4为本发明的激光测距仪、玻璃幕墙、纵向调节机构、倾角调节机构和水平角度调节机构的立体结构示意图一;图5为本发明的图4的b处放大图;图6为本发明的图3的a
‑
a方向剖视图;图7为本发明的激光测距仪、玻璃幕墙、纵向调节机构、倾角调节机构和水平角度调节机构的立体结构示意图二;图8为本发明的激光测距仪、玻璃幕墙、纵向调节机构、倾角调节机构和水平角度调节机构的侧视图;图9为本发明的图8的c
‑
c方向剖视图;图10为本发明的驱动载体的立体结构示意图;图11为本发明的驱动载体的主视图;图12为本发明的图11的d
‑
d方向剖视图。
18.图中标号为:
1
‑
激光测距仪;2
‑
玻璃幕板;3
‑
纵向调节机构;3a
‑
底座;3b
‑
滑动块;3c
‑
螺纹杆;3d
‑
第一伺服电机;4
‑
倾角调节机构;4a
‑
座体;4a1
‑
铰接座;4b
‑
连动杆;4c
‑
小量角器;4d
‑
倾角驱动组件;4d1
‑
蜗轮;4d2
‑
蜗杆;4d3
‑
第一驱动柄;4e
‑
背撑组件;4e1
‑
导向杆;4e2
‑
套筒;4e3
‑
第一弹簧;5
‑
水平角调节机构;5a
‑
内齿圈;5b
‑
驱动杆;5b1
‑
第一齿轮;5b2
‑
第二驱动柄;5c
‑
底板;5d
‑
大量角器;5e
‑
弹性组件;5e1
‑
限位杆;5e2
‑
限位筒;5e3
‑
第二弹簧;6
‑
驱动载体;6a
‑
车架;6b
‑
滚动轮组;6c
‑
转向轮组;6d
‑
转向驱动组件;6d1
‑
齿条;6d2
‑
转向杆;6d3
‑
第二齿轮;6d4
‑
万向节;6e
‑
主动杆;6e1
‑
方向盘。
具体实施方式
19.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
20.参照图1至图2所示,一种可测量目标倾角的激光测距仪,包括:激光测距仪1;包括:玻璃幕板2;纵向调节机构3,设置于玻璃幕板2上,激光测距仪1设置于纵向调节机构3的输出端,纵向调节机构3用于驱动激光测距仪1进行纵向移动;倾角调节机构4,玻璃幕板2设置于倾角调节机构4的输出端,倾角调节机构4用于驱动玻璃幕板2进行倾斜角度调节;水平角调节机构5,倾角调节机构4设置于水平角调节机构5的顶部,水平角调节机构5用于驱动倾角调节机构4进行水平角度调节;驱动载体6,水平角调节机构5设置于驱动载体6的顶部,驱动载体6用于驱动激光测距仪1、玻璃幕板2、纵向调节机构3、倾角调节机构4和水平角调节机构5进行移动;首先工作人员通过驱动载体6驱动本设备移动至工作地点,然后将激光测距仪1的输出端朝向目标物体,纵向调节机构3开始工作,纵向调节机构3的输出端驱动激光测距仪1处于合适的高度,此时需要确定激光测距仪1与目标物体的水平角度处于一致,激光测距仪1开始工作,激光测距仪1的输出端发射光线给目标物体,目标物体将光线反射回来,根据光点处于玻璃幕板2上的位置对水平角调节机构5进行调节,水平角调节机构5的输出端带动倾角调节机构4进行水平角度的转动,直至玻璃幕板2上的光点与激光测距仪1处于同一纵向线上,由于玻璃幕板2的初始角度为九十度垂直状态,所以此时需要根据激光测距仪1是否接收到发出的光线,来初步确定目标物体的平面是否也为九十度垂直状态,如果激光测距仪1没有接收到发出的光线,工作人员根据光线反射到玻璃幕板2上的位置来调节倾角调节机构4,倾角调节机构4驱动玻璃幕板2进行倾角转动,玻璃幕板2通过纵向调节机构3带动激光测距仪1随其移动,直至激光测距仪1接收到反射的激光,此时通过激光测距仪1计算出距离目标物体的距离,再根据倾角调节机构4反馈的信息得知目标物体的倾斜角度。
21.如图3所示纵向调节机构3包括:
底座3a,设置于玻璃幕板2的正面,底座3a上设有纵向滑槽;滑动块3b,设置于底座3a上并与滑槽滑动连接,激光测距仪1设置于滑动块3b上;螺纹杆3c,设置于底座3a上并与其可转动连接,螺纹杆3c与滑动块3b螺纹连接;第一伺服电机3d,设置于底座3a上,第一伺服电机3d的输出端与螺纹杆3c连接;纵向调节机构3开始工作,第一伺服电机3d的输出端带动螺纹杆3c转动,螺纹杆3c带动滑动块3b沿底座3a移动至合适高度。
22.如图4所示倾角调节机构4包括:座体4a,设置于水平角调节机构5的顶部,座体4a的顶部设有铰接座4a1;连动杆4b,设置于玻璃幕板2的底部并与其固定连接,连动杆4b与铰接座4a1可转动连接;小量角器4c,设置于座体4a的一侧,玻璃幕板2的侧壁设有指针;倾角驱动组件4d,设置于座体4a的一侧,倾角驱动组件4d的输出端与连动杆4b连接;工作人员通过倾角驱动组件4d带动连动杆4b转动,连动杆4b带动玻璃幕板2进行倾角转动,玻璃幕板2通过纵向调节机构3带动激光测距仪1随其移动,直至激光测距仪1接收到反射的激光,根据玻璃幕板2侧壁的指针在小量角器4c外缘的转动角度得知目标物体的倾斜角度,座体4a用于固定支撑,铰接座4a1用于对玻璃幕板2的转动方向进行引导。
23.如图5所示倾角驱动组件4d包括:蜗轮4d1,设置于连动杆4b的受力端;蜗杆4d2,蜗杆4d2的一端与座体4a侧壁可转动连接,蜗杆4d2与蜗轮4d1啮合;第一驱动柄4d3,设置于蜗杆4d2的受力端;工作人员手握第一驱动柄4d3转动蜗杆4d2,蜗杆4d2带动蜗轮4d1转动,蜗轮4d1带动连动杆4b转动。
24.如图6所示倾角调节机构4还包括:背撑组件4e,对称设置于玻璃幕板2的背面,背撑组件4e用于稳固玻璃幕板2的结构;背撑组件4e包括:导向杆4e1,导向杆4e1的一端与玻璃幕板2的背面铰接;套筒4e2,设置于水平角调节机构5的非工作部并与其铰接,导向杆4e1与套筒4e2滑动连接;第一弹簧4e3,设置于套筒4e2的内部,第一弹簧4e3的输出端抵触导向杆4e1;通过对称设置于玻璃幕板2的背面的背撑组件4e可以对玻璃幕板2的结构进行稳固,导向杆4e1和套筒4e2用于对玻璃幕板2的倾角方向进行引导,第一弹簧4e3用于防止导向杆4e1在套筒4e2的出现晃动。
25.如图7所示水平角调节机构5包括;内齿圈5a,座体4a的一侧设有圆环,设置于座体4a的圆环内并与其固定连接;驱动杆5b,驱动杆5b的一端设有第一齿轮5b1,驱动杆5b的另一端设有第二驱动柄5b2;底板5c,设置于驱动载体6的顶部,座体4a的圆环处于底板5c可转动连接,座体4a
的底部设有凸柱,底板5c的顶部设有弧形槽,凸柱与弧形槽滑动连接;弹性组件5e,设置于底板5c的顶部,圆环上设有指针,指针指向弹性组件5e;工作人员通过驱动杆5b将第一齿轮5b1插入内齿圈5a中,工作人员手持第二驱动柄5b2转动驱动杆5b,驱动杆5b通过内齿圈5a带动座体4a进行水平角度转动,直至玻璃幕板2上的光点与激光测距仪1处于同一纵向线上,通过座体4a圆环上的指针在大量角器5d上的位置变化得知转动角度,底板5c用于固定支撑,弧形槽用于对座体4a的移动方向加以引导。
26.如图8所示水平角调节机构5还包括:弹性组件5e,有三个,三个弹性组件5e呈三角排列状设置于大量角器5d的底部;在非工作状态时大量角器5d被弹性组件5e顶起,大量角器5d的平角面抵触座体4a的侧壁,通过大量角器5d的平角处对座体4a的初始角度加以限制,防止其出现偏转。
27.如图9所示弹性组件5e包括:限位杆5e1,设置于底板5c的底部;限位筒5e2,设置于底板5c的顶部,限位杆5e1插入限位筒5e2内部并与其滑动连接;第二弹簧5e3,设置于限位筒5e2的内部,第二弹簧5e3的两端分别抵触限位杆5e1和底板5c;限位杆5e1和限位筒5e2用于对底板5c的移动方向和范围进行限制,第二弹簧5e3用于通过限位杆5e1推动底板5c顶起。
28.如图10、图11和图12所示驱动载体6包括:车架6a;滚动轮组6b,设置于车架6a的尾部;转向轮组6c,有两个,两个转向轮组6c设置于车架6a的头部;转向驱动组件6d,设置于车架6a上,转向驱动组件6d的输出端分别与两个转向轮组6c的受力端连接;主动杆6e,设置于车架6a的尾部,主动杆6e的受力端与转向驱动组件6d的受力端连接,主动杆6e的受力端设有方向盘6e1;工作人员手持方向盘6e1通过主动杆6e推动车架6a进行移动,滚动轮组6b和转向轮组6c配合其进行转动,当需要进行转向时,工作人员扭动方向盘6e1,方向盘6e1带动主动杆6e转动,主动杆6e通过转向驱动组件6d带动两个转向轮组6c随其进行转向,车架6a用于固定支撑。
29.如图12所示转向驱动组件6d包括:齿条6d1,设置于车架6a的内部,齿条6d1的两端分别与两个转向轮组6c的受力端连接;转向杆6d2,设置于车架6a的内部并与其可转动连接;第二齿轮6d3,设置于转向杆6d2的一端,第二齿轮6d3与齿条6d1啮合;万向节6d4,设置于转向杆6d2的另一端,主动杆6e的输出端与万向节6d4连接;主动杆6e通过万向节6d4带动转向杆6d2转动,转向杆6d2带动第二齿轮6d3转动,第二齿轮6d3带动齿条6d1进行左右移动,齿条6d1带动两个转向轮组6c进行转向。
30.本发明的工作原理:首先工作人员手持方向盘6e1通过主动杆6e推动车架6a进行
移动,滚动轮组6b和转向轮组6c配合其进行转动,当需要进行转向时,工作人员扭动方向盘6e1,方向盘6e1带动主动杆6e转动,主动杆6e通过转向驱动组件6d带动两个转向轮组6c随其进行转向,通过驱动载体6驱动本设备移动至工作地点,然后将激光测距仪1的输出端朝向目标物体,纵向调节机构3开始工作,第一伺服电机3d的输出端带动螺纹杆3c转动,螺纹杆3c带动滑动块3b沿底座3a移动至合适高度,此时需要确定激光测距仪1与目标物体的水平角度处于一致,激光测距仪1开始工作,激光测距仪1的输出端发射光线给目标物体,目标物体将光线反射回来,根据光点处于玻璃幕板2上的位置对水平角调节机构5进行调节,工作人员通过驱动杆5b将第一齿轮5b1插入内齿圈5a中,工作人员手持第二驱动柄5b2转动驱动杆5b,驱动杆5b通过内齿圈5a带动座体4a进行水平角度转动,直至玻璃幕板2上的光点与激光测距仪1处于同一纵向线上,由于玻璃幕板2的初始角度为九十度垂直状态,所以此时需要根据激光测距仪1是否接收到发出的光线,来初步确定目标物体的平面是否也为九十度垂直状态,如果激光测距仪1没有接收到发出的光线,工作人员根据光线反射到玻璃幕板2上的位置来调节倾角调节机构4,工作人员通过倾角驱动组件4d带动连动杆4b转动,连动杆4b带动玻璃幕板2进行倾角转动,玻璃幕板2通过纵向调节机构3带动激光测距仪1随其移动,直至激光测距仪1接收到反射的激光,此时通过激光测距仪1计算出距离目标物体的距离,根据玻璃幕板2侧壁的指针在小量角器4c外缘的转动角度得知目标物体的倾斜角度。
31.本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:步骤一、工作人员通过驱动载体6驱动本设备移动至工作地点,然后将激光测距仪1的输出端朝向目标物体;步骤二、纵向调节机构3开始工作,纵向调节机构3的输出端驱动激光测距仪1处于合适的高度;步骤三、此时需要确定激光测距仪1与目标物体的水平角度处于一致,激光测距仪1开始工作,激光测距仪1的输出端发射光线给目标物体,目标物体将光线反射回来,根据光点处于玻璃幕板2上的位置对水平角调节机构5进行调节,水平角调节机构5的输出端带动倾角调节机构4进行水平角度的转动,直至玻璃幕板2上的光点与激光测距仪1处于同一纵向线上;步骤四、工作人员根据光线反射到玻璃幕板2上的位置来调节倾角调节机构4,倾角调节机构4驱动玻璃幕板2进行倾角转动,玻璃幕板2通过纵向调节机构3带动激光测距仪1随其移动,直至激光测距仪1接收到反射的激光;步骤五、此时通过激光测距仪1计算出距离目标物体的距离,再根据倾角调节机构4反馈的信息得知目标物体的倾斜角度。
32.以上描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1