基于子轨迹相交的城市路口中心识别及路口转弯规则提取方法
1.本发明涉及数据处理领域,特别涉及一种基于子轨迹相交的城市路口中心识别及路口转弯规则提取方法。
背景技术:
2.交通路口是城市路由的重要组成部分,在许多智能交通应用中是关键的技术之一。目前自动驾驶技术成为热门研究领域,它能够安全的在户外环境中自动导航行驶,然而,一个重要的问题就是需要实时自动对交通路口进行可靠检测以帮助自动驾驶汽车能完成自动导航。因此路口以及路口交通规则的自动提取是路径导航的关键技术,而路径导航不仅对无人驾驶汽车起着重要作用,同时也是传统司机驾驶时路径规划的重要依据。交通管理部门为了控制交通流量的需要,常常会变更路口交通规则,如果自动导航地图不能及时获取这些路口及路口规则的变更信息,会导致交通状况的恶化甚至导致严重的交通事故。试想,如果无人驾驶汽车被自动导航设备导航到某个不允许左转的路口,试图左转,则违反了交通规则,另一方面,如果是司机根据导航设备行驶到这种路口,不得不自行改变行驶路径,从而造成不必要的浪费,给交通带来更大压力。
3.同时,交通路口自动识别不仅是自动路径规划的关键技术,也可应用于数字地图的自动更新。传统的道路地图的绘制需要昂贵的野外测量和劳力密集的制图。近年来,定位技术在汽车等设备上的广泛应用产生了海量的轨迹数据,为数字地图的制作和更新提供了新的机遇。
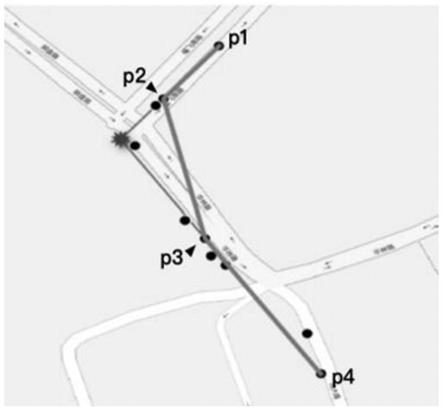
4.然而往往由于这些数据的采集频率固定,比如10到30秒发回一个数据点。因此,车辆在转弯过程中不一定就向数据中心发送轨迹点,如果仅仅通过行驶角度的改变或者gps位置的改变很难准确的定位交通路口的中心位置。如图1所示:车辆在转弯行驶过程中,发回数据中心的轨迹点有tr(p1,p2,p3,p4),这些轨迹点的gps位置都不在路口的中心处,以这些轨迹点作为检测路口的疑似点,然后通过其他聚类方法检测出的路口中心位置会导致错误的交通路口识别。
技术实现要素:
5.为了解决上述问题,本技术提出一种基于子轨迹相交的城市路口中心识别及路口转弯规则提取方法,本技术采用如下技术方案实现:基于子轨迹相交的城市路口中心识别及路口转弯规则提取方法,包括如下步骤:步骤一)选取一辆车的至少4个连续的轨迹点,通过计算相邻两个轨迹点的行驶角度差识别出具有转弯特征的轨迹点,得到转弯轨迹tr(p1,p2,p3,p4);将轨迹tr分成两条子轨迹:tr1(p1,p2)和tr2(p3,p4);计算这两条轨迹的反向延长线交点,并将该交点作为路口中心的候选点;再计算车辆转弯前的角度和转弯后的行驶角度;步骤二)按照步骤一)的方法对通过该路口的多辆车进行计算,得到多个候选点;
通过dbscan聚类算法对候选点进行聚类分析,从而准确识别出路口中心位置;步骤三)再通过dbsacn聚类算法对转弯轨迹点转弯前的角度和转弯后的角度进行聚类分析,从而识别路口的转向交通规则。
6.进一步的,所述步骤一)中路口中心的候选点的计算方法具体为:设路口中心点坐标为(p
x
, p
y
),轨迹点p1、p2、p3、p4的坐标分别为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),则有:),则有:进一步的,所述步骤一)中车辆转弯前的角度和转弯后的行驶角度的计算方法为:设tr1(p1,p2)与水平方向的角度为θ,tr2(p3,p4)与水平方向的角度为β,两条轨迹转向角为ang
p
,则有:本技术具有如下优点:识别结果准确,可以同时确定路口中心点和转向规则。
附图说明
7.为了更清楚地说明本发明的技术方案,下面对实施例描述中所需的附图作简单介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,这些附图直接得到的技术方案也应属于本发明的保护范围。
8.图1轨迹点示意图;图2两线交点坐标的计算示意图;图3为实施例1的中心点识别结果;图4为转向规则聚类分析结果;图5为行驶角度与行驶方向比照图。
具体实施方式
9.本方法提出基于两条子轨迹交叉点作为疑似路口点的方法。
10.首先,通过计算相邻两个轨迹点的行驶角度差识别出具有转弯特征的轨迹点,如
10.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
set threshold : (time interval)11.
ꢀꢀ
(distance between two points)12. 13. (candidate point)=([latitude,longitude])14. =calculating the distance between and
ꢀꢀ
using formula(3)
‑
(5).15.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
if 16.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
continue17.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
getone point ahead of named that
ꢀꢀ
with the distance larger than 18.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
gettwo point back of
ꢀꢀ
named
ꢀꢀ
that with the distance larger than19.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
the above
ꢀꢀ
4 points () form a trajectory ,20.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
compute the intersect angle using formula (6)21.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
if then22.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
type=1 (u_turn)23.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
compute the angle before turning
ꢀꢀ
and after turning using formula(6)24.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
if , then25.26.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
else if ,then27.28.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
else if 29.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
if or ,30.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
continue31.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
else32.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
type=2 (turn)33.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
computethe coordination of the intersection points34.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
between line
ꢀꢀꢀ
and
ꢀꢀꢀ
,using formula (1,2)35.36.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
else
ꢀꢀ
continue37.
ꢀꢀꢀꢀꢀꢀꢀꢀ
end for38. end for以下是利用福州市2018,5月某日的轨迹数据采用本技术中的方法进行识别的结果:图3是基于两条子轨迹反向延长线相交角度进行路口识别结果,其中的点表示识别的路口中心点。
[0015]
基于转弯前角度和转完后角度聚类识别路口转弯规则如下:图4是根据以上方法提取出的疑似路口点,对转弯前后的角度进行聚类后的结果,计算其对应的平均值。
[0016]
对照图5的角度对应的方向我们可以提取出如下规则:0: 车辆由东南方驶入,右转和左转被允许,不允许掉头1: 车辆由西方驶入,右转和掉头被允许,左转禁止2: 车辆由东北驶入,左转右转被允许,掉头禁止3: 车辆由西北方向驶入,左转右转允许,不允许掉头。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1