一种室内施工的物联网监控系统的制作方法
1.本发明涉及物联网监控系统领域,具体地说是一种室内施工的物联网监控系统。
背景技术:
2.因为家装和工装领域的迅速发展,市面上的施工队也层出不穷,施工技术也因此参差不齐,因此监理的的作用就显得尤为主要,但是监理能够监督施工质量,却没有办法监督监理的工作,因此在监理的工作上需要一个监控系统,能够让监理作为执行人,将现场的施工情况通过系统传送到电脑终端,使得电脑终端能够同时记录数据,并做出相应的指示和措施,因此,在监理所使用的的工具上需要配备检查和远程监控系统。
3.房子在完成混凝土施工后需要进行空鼓检测,一般的检测需要通过空鼓锤进行手动敲击,再通过耳力判断是否存在空鼓现在,对于经验不足的检测员会比较难以判断空鼓的声音,同时也难以确定空鼓的范围,需要通过多处敲击,来判定空鼓的范围,从而方便进行填充,如此会给检测员增强工作难度,同时也容易造成误判。
技术实现要素:
4.本发明的主要目的在于克服现有技术的不足,提供一种室内施工的物联网监控系统。
5.本发明采用如下技术方案来实现:一种室内施工的物联网监控系统,其结构包括外壳、空鼓检测器、填充剂控制器,所述空鼓检测器与填充剂控制器设于外壳内部,对称分布于外壳两端;其中,所述外壳设有把手、添加孔、开关、显示板,所述把手为两组分布于外壳外表面上,所述添加孔设于外壳上填充剂控制器所在一端的外表面,所述开关与显示板在外壳外表面上呈同一水平线分布;所述空鼓检测器设有空鼓锤、空鼓锤摆动器、电路板、拨片、振频传感芯片,所述空鼓锤卡合连接于外壳内部,所述空鼓锤摆动器贯穿空鼓锤一端连接于外壳内壁上,所述电路板嵌设于外壳内部,所述拨片连接于空鼓锤摆动器与振频传感芯片之间,呈倾斜状态与振频传感芯片相连接;所述填充剂控制器设有驱动芯片、液压驱动器、存放腔、输送管、切割填充器,所述驱动芯片与振频传感芯片通过电相连接,所述驱动芯片设于外壳内部,所述液压驱动器连接于空鼓检测器与填充剂控制器之间,所述存放腔设于外壳内部一端,所述输送管焊接于存放腔与切割填充器之间,所述切割填充器焊接于输送管端部。
6.进一步的,所述空鼓锤设有伸缩杆、旋转头,所述伸缩杆焊接于旋转头上,所述旋转头上设有锯齿槽,所述锯齿槽设于旋转头内部,所述旋转头通过锯齿槽卡合在空鼓锤摆动器上。
7.进一步的,所述旋转头为圆形球状结构,所述旋转头优选为不锈钢材质,所述旋转头用于与空鼓锤摆动器相配合,带动空鼓锤进行摆动。
8.进一步的,所述空鼓锤摆动器设有微型减速器、卡杆、弹片,所述微型减速器焊接于外壳内壁上,所述卡杆与旋转头相卡合连接,所述弹片焊接于卡杆一端,所述卡杆为圆形
杆状结构,优选为钢材质,所述弹片为四片,所述卡杆带动弹片进行转动。
9.进一步的,所述卡杆上设有锯齿,所述锯齿为四条,呈对称分布于卡杆外表面上,所述锯齿为矩形条状结构,所述锯齿用于配合锯齿槽进行工作。
10.进一步的,所述液压驱动器设有电机、推杆,所述电机焊接于外壳内壁上,所述推杆焊接于液压驱动器上,所述液压驱动器用于推动存放腔内部的混凝土界面剂进行挤压。
11.进一步的,所述切割填充器设有三通头、注入管、微型电机,所述三通头焊接于注入管与微型电机之间,所述注入管与微型电机通过对称分布于三通头两侧,所述三通头为中空圆形结构,所述三通头优选为钢材质,所述三通头用于辅助混凝土界面剂进行注入,所述微型电机用于辅助注入管进行切割工作。
12.进一步的,所述三通头设有信号接收器,所述信号接收器设于三通头内部,所述信号接收器用于驱动微型电机进行工作。
13.进一步的,所述注入管设有螺纹管、割刀、灌注头,所述螺纹管分为两部分,所述螺纹管一部分嵌设于焊接于割刀底端,一部分与微型电机相连接,所述割刀嵌设于灌注头与注入管之间,所述灌注头嵌设于注入管内部与三通头相通,所述割刀优选为不锈钢材质,形状为圆管形,顶部设有三角形刀刃。
14.有益效果
15.本发明的有工作原理是:
16.在音箱使用的时候,通过设计一种安装板和防尘网组合成的特殊组件,通过方便将防尘网从安装板的扣槽中抽出,从而对扩音器内部的沙子进行清理,再通过将防尘网嵌入安装板上的扣槽中,使得防尘网两侧的侧扣条分别卡入侧扣槽中,然后使得防尘网底部的底部扣条嵌入底部扣槽中,使得防尘网安装完毕,在防尘网安装完毕后,防尘网底部的毛刷条挡在底部扣槽和底部扣条的卡合处,避免了沙子进入底部扣槽中,导致防尘网安装不稳固,同时防尘网网孔的锥形设计,能够使得沙子通过防尘网网孔流下,使沙子不会轻易进入防尘网中,同时又不影响防尘网的正常使用。
附图说明
17.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
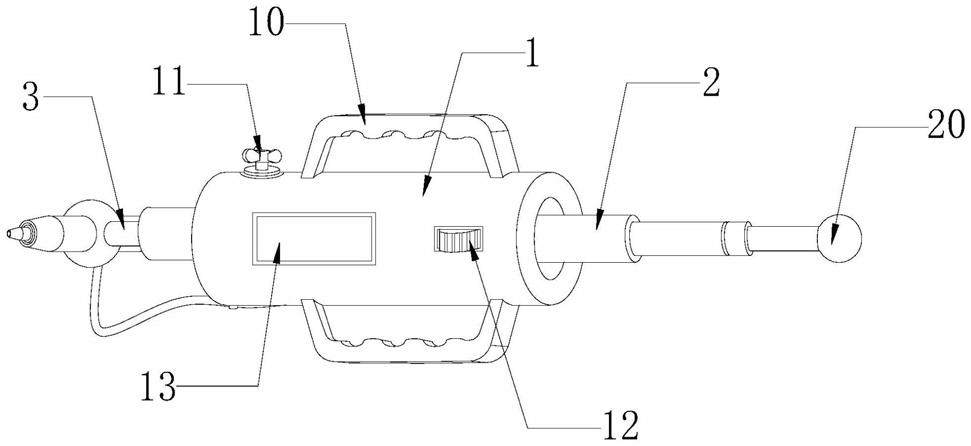
18.图1为本发明一种室内施工的物联网监控系统的结构示意图。
19.图2为本发明外壳的剖面结构示意图。
20.图3为本发明外壳的内部剖面结构示意图。
21.图4为本发明空鼓锤的放大结构示意图。
22.图5为本发明空鼓锤摆动器的放大结构示意图。
23.图6为本发明液压驱动器的放大结构示意图。
24.图7为本发明切割填充器的放大结构示意图。
25.图8为本发明切割填充器的内部结构示意图。
26.图9为本发明的系统流程图。
27.附图中的标记为:外壳1、空鼓检测器2、填充剂控制器3、把手10、添加孔11、开关12、显示板13、空鼓锤20、空鼓锤摆动器21、电路板22、拨片23、振频传感芯片24、驱动芯片
30、液压驱动器31、存放腔32、输送管33、切割填充器34、伸缩杆200、旋转头201、锯齿槽2010、微型减速器210、卡杆211、弹片212、锯齿2110、电机310、推杆311、三通头340、注入管341、微型电机342、信号接收器3400、螺纹管3410、割刀3411、灌注头3412。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1
‑
9,本发明提供一种室内施工的物联网监控系统技术方案:其结构包括外壳1、空鼓检测器2、填充剂控制器3,所述空鼓检测器2与填充剂控制器3设于外壳1内部,对称分布于外壳1两端;其中,所述外壳1设有把手10、添加孔11、开关12、显示板13,所述把手10为两组分布于外壳1外表面上,所述添加孔11设于外壳1上填充剂控制器3所在一端的外表面,所述开关12与显示板13在外壳1外表面上呈同一水平线分布;所述空鼓检测器2设有空鼓锤20、空鼓锤摆动器21、电路板22、拨片23、振频传感芯片24,所述空鼓锤20卡合连接于外壳1内部,所述空鼓锤摆动器21贯穿空鼓锤20一端连接于外壳1内壁上,所述电路板22嵌设于外壳1内部,所述拨片23连接于空鼓锤摆动器21与振频传感芯片24之间,呈倾斜状态与振频传感芯片24相连接;所述填充剂控制器3设有驱动芯片30、液压驱动器31、存放腔32、输送管33、切割填充器34,所述驱动芯片30与振频传感芯片24通过电相连接,所述驱动芯片30设于外壳1内部,所述液压驱动器31连接于空鼓检测器2与填充剂控制器3之间,所述存放腔32设于外壳1内部一端,所述输送管33焊接于存放腔32与切割填充器34之间,所述切割填充器34焊接于输送管33端部,所述空鼓锤20设有伸缩杆200、旋转头201,所述伸缩杆200焊接于旋转头201上,所述旋转头201上设有锯齿槽2010,所述锯齿槽2010设于旋转头201内部,所述旋转头201通过锯齿槽2010卡合在空鼓锤摆动器21上,所述旋转头201为圆形球状结构,所述旋转头201优选为不锈钢材质,所述旋转头201用于与空鼓锤摆动器21相配合,带动空鼓锤20进行摆动,所述空鼓锤摆动器21设有微型减速器210、卡杆211、弹片212,所述微型减速器210焊接于外壳1内壁上,所述卡杆211与旋转头201相卡合连接,所述弹片212焊接于卡杆211一端,所述卡杆211为圆形杆状结构,优选为钢材质,所述弹片212为四片,所述卡杆211带动弹片212进行转动,所述卡杆211上设有锯齿2110,所述锯齿2110为四条,呈对称分布于卡杆211外表面上,所述锯齿2110为矩形条状结构,所述锯齿2110用于配合锯齿槽2010进行工作,所述液压驱动器31设有电机310、推杆311,所述电机310焊接于外壳1内壁上,所述推杆311焊接于液压驱动器31上,所述液压驱动器31用于推动存放腔32内部的混凝土界面剂进行挤压,所述切割填充器34设有三通头340、注入管341、微型电机342,所述三通头340焊接于注入管341与微型电机342之间,所述注入管341与微型电机342通过对称分布于三通头340两侧,所述三通头340为中空圆形结构,所述三通头340优选为钢材质,所述三通头340用于辅助混凝土界面剂进行注入,所述微型电机342用于辅助注入管341进行切割工作,所述三通头340设有信号接收器3400,所述信号接收器3400设于三通头340内部,所述信号接收器3400用于驱动微型电机342进行工作,所述注入管341设有螺纹管3410、割刀3411、灌注头3412,所述螺纹管3410分为两部分,所述螺纹管3410一部分嵌设于焊接于割刀
3411底端,一部分与微型电机342相连接,所述割刀3411嵌设于灌注头3412与注入管341之间,所述灌注头3412嵌设于注入管341内部与三通头340相通,所述割刀3411优选为不锈钢材质,形状为圆管形,顶部设有三角形刀刃。
30.实施例:在使用时,通过调节空鼓检测器2上的伸缩杆200,将空鼓锤20调整到合适的长度,然后将空鼓锤20靠近混凝土墙壁,推动开关12,使得外壳1内部的电路板22电路连通,驱动微型减速器210进行转动,从而带动卡杆211在45
°‑
90
°
区间内进行来回转动,卡杆211上的锯齿2110与锯齿槽2010相啮合,当卡杆211转动的时候也会带动空鼓检测器2上的空鼓锤20进行摆动,空鼓锤20在摆动时敲击在混凝土墙上,将敲击墙壁振动的频率和传播范围传送回弹片212上,弹片212通过振幅接触拨片23,拨片23受撞击传回振频传感芯片24,通过振频传感芯片24感应墙壁是否有空鼓现象,以及空鼓范围,然后将数据传送回电脑终端,进行记录,同时通过显示板13显示振动的数据,让检测员对墙壁是否存在空鼓一目了然;同时,在电脑终端的指示下,能够通过电脑终端对三通头340内部的信号接收器3400,使得信号接收器3400驱动微型电机342进行工作,驱动微型电机342上的螺纹管3410进行旋转推动,从而推动注入管341内部的割刀3411进行推出和转动,从而对墙壁上空鼓的部分进行刮除清理,完成清楚后割刀3411回收,螺纹管3410封闭三通头340与微型电机342之间的连接处,然后再通过驱动芯片30驱动液压驱动器31,使得电机310驱动推杆311推动液压驱动器31在存放腔32内部移动,从而将存放腔32内部的混凝土界面剂进入输送管33,经由输送管33进入三通头340,再通过三通头340输送到注入管341,再注入到空鼓的墙壁中,完成空鼓填充。
31.本发明相对现有技术获得的技术进步是:
32.通过空鼓锤对混凝土墙壁进行空鼓检测,再通过振频传送到电脑终端,确定是否存在空鼓现象及空鼓的范围,摒除了手工进行敲击检测而容易造成误判的问题,同时也避免了回弹力使工作人员手腕受伤的问题,再通过电脑终端发送指令,驱动割刀对空鼓处进行小范围的刮除清理,然后通过推动混凝土界面剂进行填充,在填充混凝土界面剂的时候也可以通过信号接收器判断混凝土界面剂的使用量,通过电脑终端同时监控混凝土墙面施工情况,从而进行数据记录,之后再进行数据比对,判断施工队的施工质量,便于筛选出优质施工队进行施工,完善建筑工程施工系统。
33.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1