一种全系统RTK快速选星方法与流程
一种全系统rtk快速选星方法
技术领域
1.本发明属于接收机导航技术领域,具体涉及一种全系统rtk快速选星方法。
背景技术:
2.随着北斗三代全面组网完成,单北斗全天最大可观测卫星数就可能超过25颗,加上gps、glonass以及伽利略全天最大可见卫星超过40颗。天空中卫星越来越多,这样也给卫星导航在城市峡谷等恶劣带来了机遇,但对于开阔环境,将全系统所有卫星都参与rtk解算可能会导致所花费超过1s的情况。因此如何在保证高精度的同时,尽可能减少运算量变成了工程应用必须考虑的问题。
3.针对目前实际应用嵌入式系统cpu资源有限,如果将接收机所有观测卫星全部参与rtk解算,每增加一颗卫星,观测矩阵维度就增加了2*nf纬,nf为卫星频点数,严重增加了cpu负荷。此外当卫星数达到一定时,随着卫星数的增加对定位精度的影响越来越小。
技术实现要素:
4.本发明要解决的技术问题是:提供一种全系统rtk快速选星方法,用于从可见卫星中选择部分卫星参与解算。
5.本发明为解决上述技术问题所采取的技术方案为:一种全系统rtk快速选星方法,包括以下步骤:
6.s1:接收机定位并计算参与单点定位的卫星的伪距残差,剔除残差超过设定阈值的卫星;
7.s2:计算卫星的仰角和方位角,统计仰角大于60
°
的卫星数和仰角小于60
°
的卫星数,标计各个系统的仰角最高和仰角次高的卫星;若卫星数大于设定卫星数则开始选星,统计单频卫星数和多频卫星数,若存在单频卫星,则优先剔除低仰角的单频卫星;若剩余的卫星数依然大于设定卫星数则执行下一步骤;
8.s3:对各个系统中除开仰角最高和仰角次高的卫星的剩余卫星的方位角进行排序,记录排序后方位角对应的卫星号;将每两个相邻方位角做差并排序方位角差值,记录排序后方位角差值对应的卫星号;
9.s4:结合剩余卫星的仰角和观测量的完整性,从方位角最接近的两颗卫星里剔除一颗;
10.s5:判断剩余卫星的最大验后标准化残差是否连续n个历元大于阈值,否则参与解算;是则剔除该卫星m个历元,并从已剔除的卫星中选择一个仰角最高的卫星加入解算。
11.按上述方案,所述的步骤s1中,具体步骤为:
12.s11:设真空中光速为clight,第i颗卫星的伪距残差为v
i
,第i颗卫星的伪距为p,迭代收敛后第i颗卫星的位置到接收机的几何距离和接收机钟差分别为r和dtr,第i颗卫星的电离层延迟、对流层延迟、卫星钟差分别为ion、trop、dts;则定位后的伪距残差为:
13.v
i
=p
i
‑
(r
i
+ion
i
+trop
i
+dtr
i
‑
clight
i
*dts
i
);
14.s12:对比第i颗卫星定位后的伪距残差与设定阈值,若第i颗卫星定位后的伪距残差大于设定阈值,则将第i颗卫星的标志位置0,不参与后续解算;若第i颗卫星定位后的伪距残差小于等于设定阈值,则将第i颗卫星的标志位置1,参与后续解算。
15.按上述方案,所述的步骤s2中,具体步骤为:
16.s21:设接收机在地心地固坐标系中的观测矢量点p的坐标为(x,y,z)、卫星所在点s的坐标为(x
s
,y
s
,z
s
),则从接收机到卫星的观测矢量为:
[0017][0018]
设观测矢量点p在站心坐标系中表示为:
[0019]
[δe,δn,δu]
t
=s
·
[δx,δy,δz]
t
,
[0020]
设接收机位置经度为λ,接收机位置纬度为φ,则坐标变换矩阵s为:
[0021][0022]
则卫星的仰角θ和方位角α分别为:
[0023][0024]
α=arctan(δe/δn);
[0025]
s22:设仰角大于60
°
以的卫星数为n1,仰角小于等于60
°
的卫星数为n2;卫星总数为n,设定卫星数为num,当n>num则开始选星;
[0026]
s23:当n>num时,设需剔除的卫星数为n0,则n0=n
‑
num;
[0027]
设所有系统的最大卫星数的和为maxsat,多频卫星号对应的标志位为mulfrq[maxsat],若卫星为多频卫星则置1,若卫星为单频卫星则置0;设单频卫星数为sigfrq,判断需剔除的卫星数n0与单频卫星数sigfrq的大小,若sigfrq大于等于n0则剔除n0个单频卫星,选星结束;若sigfrq小于n0,则剔除sigfrq个卫星,更新n0的取值为n0=n0‑
sigfrq。
[0028]
按上述方案,所述的步骤s3中,具体步骤为:
[0029]
s31:设最大可见卫星数为maxobs,方位角数组为azls1[maxobs],对应的卫星号数组为sats1[maxobs];对azls1数组中的方位角进行排序的同时排序sats1数组里对应方位角的卫星号;
[0030]
s32:将步骤s31排序后的azls1数组中每两个相邻元素做差,设方位角差值数组为azls2[maxobs],对应的卫星号数组为sats2[maxobs];对azls2数组中的方位角差值进行排序的同时排序sats2数组里对应方位角差值的卫星号。
[0031]
进一步的,所述的步骤s4中,具体步骤为:
[0032]
s41:计算n1与n2的比值k;
[0033]
s42:若k小于1/3,设sats2数组中方位角差值最小的卫星号分别为sat1和sat2;分别判断sat1号卫星和sat2号卫星对应的mulfrq标志位是否为1,若sat1号卫星和sat2号卫
星都是多频卫星或都是单频卫星,则剔除仰角较低的卫星;若sat1号卫星和sat2号卫星中只有一个是单频卫星,则剔除单频卫星;
[0034]
s43:若k大于1/3,分别判断sat1号卫星和sat2号卫星对应的mulfrq标志位是否为1,若sat1号卫星和sat2号卫星都是多频卫星或都是单频卫星,则剔除仰角较高的卫星;若sat1号卫星和sat2号卫星中只有一个是单频卫星,则剔除单频卫星;
[0035]
s44:每剔除一颗卫星后更新n1与n2,从步骤s41循环直至剩余的卫星数等于设定卫星数。
[0036]
按上述方案,所述的步骤s5中,计算最大化验后标准化残差的具体步骤为:设卫星的高度角为e,a和b为根据经验或拟合确定的待定系数,则观测量的权重σ为:
[0037]
σ2=a2+b2/sin2e,
[0038]
设参数估计残差为v,则最大化验后标准化残差为:
[0039][0040]
进一步的,还包括以下步骤:不剔除各个系统的仰角最高的卫星和仰角次高的卫星。
[0041]
一种计算机存储介质,其特征在于:其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种全系统rtk快速选星方法。
[0042]
本发明的有益效果为:
[0043]
1.本发明的一种全系统rtk快速选星方法,根据可见卫星的仰角和方位角以,依次剔除单频卫星和相邻方位角的卫星,直至解算卫星数等于设定的解算卫星,实现了从可见卫星中按设定策略快速选择观测质量好的部分卫星参与rtk定位解算的功能。
[0044]
2.本发明结合定位后的残差,提高了首次固定时间和固定后的精度。
[0045]
3.本发明用于gnss卫星导航接收机,在保证定位精度的同时有利于快速固定模糊度,并且能够根据硬件资源灵活调整解算卫星数。
[0046]
4.本发明相对传统选星降低了运算量,有利于实时全系统rtk解算。
附图说明
[0047]
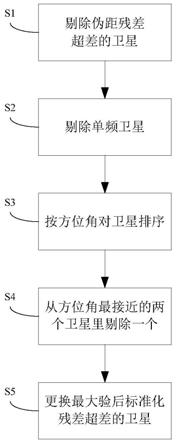
图1是本发明实施例的流程图。
[0048]
图2是本发明实施例的卫星仰角和方位角计算方法图。
[0049]
图3是本发明实施例的参与rtk解算的卫星数量图。
[0050]
图4是本发明实施例的选星与不选星的enu方向偏差图。
具体实施方式
[0051]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0052]
参见图1,本发明的实施例包括以下步骤:
[0053]
1.计算参与单点定位解算各个卫星伪距残差,剔除残差较大的卫星。
[0054]
1.1如1.所述,定位后的伪距残差为:
[0055]
v
i
=p
i
‑
(r
i
+ion
i
+trop
i
+dtr
i
‑
clight
i
*dts
i
),
[0056]
式中:设真空中光速为clight,v
i
表示第i颗卫星伪距残差,p表示第i颗卫星伪距,
r和dtr表示迭代收敛后第i颗卫星位置到接收机的几何距离和接收机钟差,ion、trop、dts分别第i颗卫星的电离层延迟、对流层延迟以及卫星钟差。
[0057]
如1.2所述,将定位后的伪距残差与设定的阈值对比,大于阈值则将其标志位置0,不参与后续解算。
[0058]
2.存储所有可见星仰角,方位角,统计仰角大于60
°
和小于60
°
的卫星数,各个系统仰角最高卫星,单频和多频卫星数。
[0059]
2.1如2.所述,计单频卫星数为sigfrq,多频卫星号对应的mulfrq[maxsat]标志位置1,否则置0。其中maxsat为所有系统最大卫星数和。卫星仰角和方位角计算方法如图2所示,p、s分别为接收机在地心地固坐标系中的坐标(x,y,z)和(x
s
,y
s
,z
s
),则接收机至卫星的观测矢量为:
[0060][0061]
观测矢量点p在站心坐标系中表示为:
[0062]
[δe,δn,δu]
t
=s
·
[δx,δy,δz]
t
[0063]
其中,坐标变换矩阵s为:
[0064][0065]
λ代表接收机位置经度,φ代表接收机位置纬度。则卫星仰角θ和方位角α分别为:
[0066][0067]
α=arctan(δe/δn)
[0068]
2.2如2.1所述,计大于60
°
以上卫星数为n1,小于60
°
卫星为n2,可见卫星总数n,各个系统仰角最高卫星和为n0。设定的解算卫星数为num,当n>num则开始选星。
[0069]
2.3如2.3所述,当n>num,需剔除卫星数记n0,n0=n
‑
num。如果是多频数据优先剔除单频卫星,判断n0和sigfrq的大小,如果sigfrq大于或等于n0,则剔除n0个单频卫星,选星结束。如果sigfrq小于n0,则剔除sigfrq个卫星执行后续选星,跟新n0=n0‑
sigfrq。
[0070]
3.对剩余除各个系统仰角最高的卫星的可见卫星方位角进行排序,记录排序后卫星号。并将相邻方位角做差并按照从小到大排序。
[0071]
3.1如3.所述,方位角数组记azls1[maxobs],卫星号数组记sats1[maxobs],maxobs为最大可见卫星数。对卫星方位角进行排序的同时交换sats1数组里面的卫星号。
[0072]
3.2如3.1所述,将3.1中的azls1数组中每两个相邻元素做差,并存储做差后的值和卫星号分别记为azls2[maxobs],sats2[maxobs]。对azls2进行排序,同时交换sats2数组里面的卫星号。
[0073]
4.结合卫星仰角及观测量的完整性,从方位角最接近的两颗的卫星里面剔除一颗卫星。
[0074]
4.1如2.2和4.所述,计算n1与n2的比值,记作k。
[0075]
4.2如4.1所示,如果k小于1/3,记sats2中方位角相差最小的卫星号为sat1,sat2。判断sat1和sat2对应mulfrq标志位是否为1,如果都是多频或单频则剔除仰角较低的卫星,否则剔除单频卫星。
[0076]
4.3如4.1所示,如果k大于1/3,判断sat1和sat2对应mulfrq标志位是否为1,如果都是多频或单频则剔除仰角较高的卫星,否则剔除单频卫星。
[0077]
5.判断参数估计解算卫星最大验后标准化残差是否连续n个历元大于阈值,是则剔除该卫星m个历元,并从已剔除卫星中找一个仰角最高的卫星加入解算。
[0078]
5.1如5.所述,最大化验后标准化残差为
[0079][0080]
式中,v为参数估计残差,其中σ为观测量的权重表示为:
[0081]
σ2=a2+b2/sin2e
[0082]
e为卫星高度角,a和b为待定系数,通常根据经验或者采用拟合的方式确定。
[0083]
当接收机定位时,可以得到各个卫星的仰角、方位角以及伪距残差,并统计各个系统卫星数,仰角最高和次高卫星以及单频观测量个数。利用上述信息,本发明能够快速从全部可见星中选择出设定解算最大的卫星数。首先,当可见卫星数大于设定卫星数,优先剔除单频卫星,一方面多频观测量可以快速准确的探测到周跳的载波观测量,其次,多频观测量有利于对电离层的估计(这里优先剔除单频卫星建立在观测数据是多频的前提下,如果数据本身都是单频卫星,直接进行下一步)。其次,从相邻方位角的卫星里面剔除一颗卫星。计算仰角大于60
°
和小于60
°
的比值。比值小于1/3则剔除仰角低的卫星,否则剔除仰角高的卫星。注:此时剔除卫星满足两个原则,各个系统仰角最高和次高卫星不剔,优先剔除单频卫星;最后每当剔除一颗卫星后,更新仰角大于60
°
和小于60
°
卫星数,重新计算仰角大于60
°
和小于60
°
的比值,重复上述步骤至解算卫星数等于设定的解算卫星。
[0084]
此外,本发明还提出了一种根据卫星残差选星的策略,在进行选星前,对于单点定位伪距标准化残差大的卫星不参与rtk解算。这样做的目的是,用伪距初始化模糊度单差值和方差,当伪距残差较大,说明改卫星观测质量较差,加入rtk解算可能会导致首次固定时间加长或有固定解变成浮点解的情况。另外,对rtk参数估计过程中最大验后标准化残差持续多个历元大于阈值的卫星不参与rtk解算。一般参数估计过程中,会采用抗差算法,但当一颗卫星粗差持续存在时,尽管采用方差膨胀进行降权,粗差转移的现象依然存在。
[0085]
表一:嵌入式arm3352平台对流层电离层进行参数估计下不同卫星数各个模块耗时对比
[0086] 252627282930313233快速选星0.10.10.10.10.10.10.10.10.1参数估计276.1272.6297.6328.2370.0393.3455.9486.9529.0模糊度搜索232.4235.6250.1277.6303.2325.9356.3373.0415.6
[0087]
图3和图4为采集导航院truecors接收机8小时的数据,事后进行rtk解算,基线长度约为11公里,对流层和电离层进行参数估计,在选星和不选星下的enu方向偏差。标准差分别为:0.0053,0.0043,0.0138和0.0044,0.0040,0.0122。
[0088]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术
人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1