具有变化的输出斜率的位置传感器的制作方法
1.本发明的实施例涉及位置传感器,尤其涉及具有变化的输出斜率的位置传感器。
背景技术:
2.位置传感器被用于各种设置,以测量一个组件相对于另一个组件的位置。感应式位置传感器可以被用于汽车、工业和消费应用以进行绝对旋转和线性运动感测。在许多感应式定位感测系统中,发射线圈被用于感应在一组接收线圈上方滑动或旋转的金属目标中的涡流。接收线圈接收由涡流和发射线圈产生的磁场,并向处理器提供信号。处理器使用来自接收线圈的信号来确定金属目标在该组线圈上方的位置。处理器、发射线圈和接收线圈都可以被形成在印刷电路板(pcb)上。
3.设计位置传感器的挑战之一是满足用户需求。典型地,位置传感器正被设计用于取代现有技术,因此新位置传感器的外壳和输出信号应与现有技术的外壳和输出信号匹配。典型的位置传感器根据目标位置提供线性输出信号。
4.因此,需要开发具有修改的输出信号的位置传感器。
技术实现要素:
5.提出了位置传感器。根据一些实施例的位置传感器的一些实施例包括一种位置传感器,该位置传感器包括:发射线圈;接收线圈,所述接收线圈包括至少一个极性改变;目标,被配置为穿过所述接收线圈;和控制器,被配置成驱动所述发射线圈,接收来自所述接收线圈的信号,并提供指示所述接收线圈上的目标位置的位置响应,其中,所述位置响应呈现第一斜率的第一线性区域和第二斜率的第二线性区域。
6.在一些实施例中,位置传感器包括:接收线圈,该接收线圈包括以几何形状形成在印刷电路板(pcb)上的第一线圈和第二线圈,其中所述第一线圈和所述第二线圈中的至少一个被配置为包括至少一个相位改变;和发射线圈,该发射线圈围绕所述接收线圈形成在pcb上,其中当目标穿过所述接收线圈时的位置响应包括具有不同斜率的多个线性区域。
7.下面参照附图讨论这些实施例和其他实施例。
附图说明
8.图1a和图1b示出了位置传感器的典型操作。
9.图2示出了图1b所示的位置传感器的典型响应与位置输出信号的关系。
10.图3示出了位置传感器的目标响应与位置输出信号的关系。
11.图4示出了根据本发明的一些实施例的位置传感器。
12.图5示出了图4所示的位置传感器的接收传感器线圈中极性的物理改变。
13.图6提供了位置传感器的接收传感器线圈中极性的物理改变的另一视图。
14.图7a和图7b展示了根据一些实施例的接收传感器线圈的操作。
15.图8a和图8b分别示出了根据目标位置的正弦电压和余弦电压,该目标位置是在前
半时段中并且通过位置传感器中的接收传感器线圈的平坦区域。
16.图9a和图9b分别示出了在位置传感器中的接收传感器线圈的第一时段的前半时段和通过接收传感器线圈的第二时段的前半时段的、结果输出与位置的关系。
17.图10示出了根据本发明的一些实施例的旋转位置传感器。
18.图11a和图11b示出了根据一些实施例的旋转位置传感器的另一实施例。
19.图12a、图12b和图12c示出了从根据一些实施例的旋转位置传感器导出的数据和结果。
20.图13是根据一些实施例的旋转位置传感器的照片。
21.下面进一步讨论本发明的实施例的这些方面和其他方面。
具体实施方式
22.在下面的描述中,阐述了描述本发明的一些实施例的具体细节。然而,对于本领域技术人员来说显而易见的是,可以在没有这些特定细节的部分或全部的情况下实施一些实施例。本文所公开的具体实施例是说明性的,而不是限制性的。本领域技术人员可以认识到,虽然没有在本文具体描述、但是仍处于本发明的范围和精神内的其他元素。
23.本说明书示出了发明方面,并且实施例不应被视为限制界定所保护的发明的权利要求。在不脱离本说明书和权利要求书的精神和范围的情况下,可以进行各种改变。在一些实例中,为了不混淆本发明,未详细示出或描述公知的结构和技术。
24.本发明的实施例提供具有变化的输出信号的位置传感器。具体地,根据一些实施例的位置传感器包括一个或多个相位改变,以便可以修改根据目标位置的位置输出信号的斜率。
25.图1a和图1b示出了典型定位系统100的操作。尽管图1a和图1b示出了线性位置传感器的操作,但旋转位置传感器在操作上是相同的。如图1a所示,定位系统包括发射/接收控制电路102,发射/接收控制电路102被耦合用于驱动发射线圈106并从接收线圈104接收信号。在大多数配置中,接收线圈104位于发射线圈106内,然而,在图1a中,为了澄清的目的,它们是分开示出的。接收线圈104通常在物理上位于发射线圈106的边界内。本发明的实施例可以包括发射线圈106、两个接收线圈104以及集成电路(ic)102,集成电路102驱动发射线圈106并测量源于全部形成在印刷电路板(pcb)上的接收线圈104中的信号。
26.图1b示出了线性位置定位系统中的发射线圈106和接收线圈104的配置。如图1b所示,导电金属目标124可以定位在发射线圈106和两个接收线圈104上方。
27.如图1a所示,发射线圈106被驱动以形成磁场108。发射线圈106可以在一频率范围或特定频率下被驱动。在图1a中,具有箭头所示的正电流的磁场108围绕每根导线呈圆形,并且以如图1a所示的电流方向从线圈106内部的页面指向线圈108外部的页面。接收线圈104位于线圈106内,如图1b所示。发射线圈106以能够产生电磁场108的任何频率被驱动以在接收线圈104中感应电压。通常,可以有任意数量的接收线圈,然而,为了便于讨论,在这些示例中示出了具有两个接收线圈的系统。
28.图1b示出了线性位置传感器的发射线圈(tx)106内的传感器接收线圈(rx)104的布置。如图1b所示,传感器接收线圈104包括正弦波定向线圈rxsin 112和余弦定向信号线圈rxcos 110。正弦波定向线圈rxsin 112包括正弦环路114、116和118,其中线圈112以同相
方向或反相方向缠绕,这里以顺时针或逆时针描绘,从而由于电磁场108的存在,在相反符号的环路中产生电压。如图所示,正弦波定向线圈112的布线在环路114和118中提供顺时针旋转以产生名义上的正极性,并且在环路116中提供逆时针旋转以产生名义上的负极性。类似地,余弦定向线圈110可以包括具有顺时针定向的第一环路120和具有逆时针定向的第二环路122。图1b示出了可能的电动势参考方向,如箭头所示,该电动势参考方向与图1a所示的发射线圈106产生的磁场一致。
29.在图1b所示的系统中,发射线圈(tx)106由电路102激励以产生如磁场108所示的可变电磁场(emf),电路102可以是集成电路。磁场108与接收线圈(rx)104耦合。如果如图1b所示将导电金属目标124放置在接收线圈104的顶部,则在金属目标124中产生涡流。该涡流产生新的电磁场,理想情况下该新的电磁场与场108相等且相反,抵消金属目标124正下方的接收线圈104中的场。接收线圈(rx)104捕获由发射线圈106产生的可变电磁场108和由金属目标124感应的电磁场,从而在接收线圈104的端子处产生正弦电压。
30.在没有金属目标124的情况下,在rx线圈104(图1b中标记为rxcos 110和rxsin 112)的端子处将没有电压。当金属目标124放置在相对于rx线圈104的特定位置时,金属目标124所覆盖的区域上的合成电磁场理想情况下为零,并且因此根据金属目标124相对于接收线圈104的位置,rx线圈104的端子处的电压将具有不同的特性。rx线圈104以如下方式被设计:当金属目标124扫过接收线圈104时,在一个rx线圈(rxsin 112)的端子处产生正弦电压(vsin),并且在另一个rx线圈(rxcos 110)的端子处产生余弦电压(vcos)。目标相对于rx线圈104的位置调制rx线圈104的端子处的电压的幅度和相位。输出响应可被计算为与反正切(vsin/vcos)成比例。
31.如图1a所示和上文所讨论的,发射线圈106、接收线圈104和发射/接收电路102可以被安装在单个pcb上。此外,pcb可以被配置成使得金属目标124定位于接收线圈104上方并且通过气隙(ag)与接收线圈104隔开。金属目标124相对于pcb的位置可以通过处理正弦定向线圈112和余弦定向线圈110产生的信号来确定,该pcb上安装有接收线圈104和发射线圈106。以下,在理论上的理想条件下描述金属目标124相对于接收线圈104的位置的确定。
32.在图1b中,金属目标124位于第一位置。在该示例中,图1b描绘了线性位置定位器系统的操作。线性位置定位器和旋转位置定位器的工作原理相同。在下面的讨论中,通过提供相对于正弦定向线圈112的正弦操作的角度关系,给出了与余弦定向线圈110和正弦定向线圈112的构造相关的位置。正弦定向线圈112的正弦操作由金属目标124的前缘和线圈110和112的位置引起。金属目标124在这种系统中的实际位置可以从通过接收线圈104的输出电压以及接收线圈110和112的拓扑所测量的角度位置得出。此外,如图1b所示,线圈110的拓扑和线圈112的拓扑被协调以提供对金属目标124相对于接收线圈104的位置的指示。
33.图2示出了图1b所示的接收传感器线圈的典型输出响应。如图2所示,当目标124穿过传感器线圈104的范围时,响应与位置的关系是线性的。因此,可以将目标位置确定为响应信号的线性函数。在这些系统中,如图2所示的响应与位置的关系曲线是线性的,具有正斜率或负斜率。使用传统传感器线圈104不可能更改该斜率或者将该斜率从正斜率改变到负斜率。
34.然而,在一些应用中,非常希望传感器输出沿平坦区域具有正斜率和负斜率二者。这种响应的一个例子在图3中示出。在某些情况下,这种响应可以用微型计算机处理图2所
示的线性响应曲线来制造。然而,这种方法有一些明显的缺点。特别是,这种方法显著地增加了成本,使得位置传感器响应更慢,并且增加了上市时间。特别地,与处理正弦信号和余弦信号以实现位置确定所需的计算相比,根据该方法制作的位置传感器需要额外的计算。
35.根据本发明的实施例,更改传感器线圈的正弦传感器线圈和余弦传感器线圈的结构以提供例如如图3所示的响应曲线,而无需进一步处理。特别地,正弦线圈和余弦线圈的线圈极性在沿传感器线圈的一个或多个点处被改变。以这种方式,输出信号的斜率通过传感器线圈的物理更改而在这些点处被反转。此外,当目标穿过极性改变区域时,产生平坦响应。
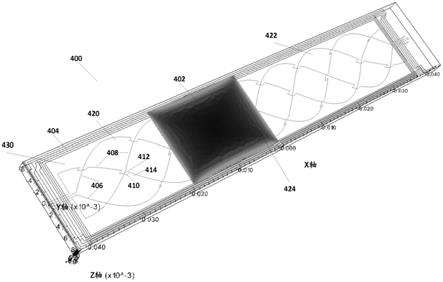
36.图4示出了根据本发明的一些实施例的两时段线性位置传感器400。如图4所示,位置传感器400包括发射线圈404和接收线圈430。被耦合用于控制发射线圈404和来自接收线圈430的接收信号的控制器未被明确示出,但本领域技术人员将认识到,下面讨论的功能是对来自接收线圈430的信号的处理结果。
37.图4示出了正弦线圈408和余弦线圈406,每个线圈都有沿传感器400延伸的两个时段。这两个时段在图4中被标记为时段420和时段422。发射线圈404定位于正弦线圈408和余弦线圈406周围。图4示出了位置传感器400的三维视图。因此,正弦线圈408和余弦线圈406由沿着印刷电路板(pcb)的顶部和底部的迹线形成,这些迹线通过过孔连接。因此,顶部迹线414和底部迹线412通过过孔410连接。在本示例中正弦线圈408和余弦线圈406被布置成使得线圈极性在第一时段和第二时段之间被改变。通过物理地互连正弦线圈408和余弦线圈406的迹线来改变线圈极性,以使电流与传统系统中通常获得的电流相反。
38.如下面更详细地讨论的,输出信号的斜率取决于目标402是在第一时段420之上还是在第二时段422之上。此外,当目标402在极性改变区域424之上时,输出响应是平坦的(不包括从可能施加的偏移产生的一些噪声)。因此,当目标402穿过接收线圈406和408时,在第一时段420中,输出响应将具有第一斜率,并且在第二时段422中,输出响应将具有第二斜率,该第二斜率为第一斜率的负值。当目标在极性改变424时,输出响应将是平坦的。
39.图5示出了接收线圈430中的结构极性改变424的实现。图5示出了作为第一接收线圈528的一部分的上迹线506和508以及下迹线510和512。图5进一步示出了形成第二接收线圈530的一部分的上迹线518和520以及下迹线514和516。在一些实施例中,第一接收线圈528可以是正弦线圈408,并且第二接收线圈530可以是余弦线圈406。在一些实施例中,取决于沿接收线圈430的极性改变424的位置,第一接收线圈528可以是余弦线圈406,而第二接收线圈530可以是正弦线圈408。
40.如图所示,迹线506、508、510、512、514、516、518和520可以形成在pcb的顶部和底部上,并且可以使用穿过pcb的过孔在pcb的顶部和底部之间转变。这种布置允许在具有下面讨论的连接的结构极性改变424的区域中形成迹线。
41.在传统结构中,正弦线圈408和余弦线圈406不包括极性转换。因此,第一线圈528的上迹线506和508直接连接,并且第一线圈528的下迹线510和512直接连接,从而形成第一线圈528。同样,在传统结构中,第二线圈530的迹线518和516被连接,并且第二线圈530的迹线514和520被连接,从而形成第二线圈530。然而,图5示出本发明的实施例,其中迹线506与迹线512耦合并且迹线508与迹线510耦合。同样,在图5示出的实施例中,迹线518与迹线520耦合,并且迹线514与迹线516耦合,这在区域424中提供了极性转换。
42.如图5所示,在本发明的一些实施例中,在第一线圈528和第二线圈530二者中引入极性转换。特别是,如图5所示,在第一线圈528中,迹线506通过连接迹线502连接到迹线512,并且迹线510通过连接迹线504连接到迹线508。这导致第一线圈528中的极性转换。在第二线圈530中,如图5所示,通过连接迹线514和迹线516以及连接迹线518和迹线520,引入了极性转换。
43.因此,如图5所示,通过在极性转换区域424中引入极性转换,当目标402穿过极性转换区域424时,由接收线圈430提供的响应斜率切换斜率。此外,当目标402在极性转换区域424之上时,获得平坦响应曲线。
44.图6示出了如图4和图5所示的位置传感器400的极性转换区域424的平面图。图6所示的示例示出了迹线506、508、510、512、514和516如何布置在印刷电路板612的每侧上以构造第一线圈528和第二线圈530中的极性转换。特别地,过孔604允许迹线506从pcb 612的底层转换到pcb 612的顶层,使得迹线518可以与迹线506交叉而无需连接。过孔602同样允许迹线510和514的交叉。过孔606允许迹线508和520的交叉。过孔608允许迹线512和516的交叉。如图6所示的示例中所图示的,连接迹线504可以形成在pcb 612的顶侧,并通过过孔612连接到迹线508和510。连接迹线502可以主要形成在pcb 612的底侧,并通过过孔610到达pcb 612的顶侧以交叉迹线520和516。本领域技术人员将认识到,存在用于构造极性转换区域424中的极性转换的其他配置。
45.图5和图6示出了一个示例,其中极性改变区域424定位于两时段位置传感器400的第一时段420和第二时段422之间。在这种情况下,第一接收线圈530对应于余弦线圈406,第二接收线圈528对应于正弦线圈408。然而,在一些实施例中,极性改变可以发生在接收线圈430的其他地方。例如,如果极性改变被转换,则第一线圈530可以对应于正弦线圈408,第二线圈528可以对应于余弦线圈406。
46.图4、图5和图6示出了具有线性位置传感器的实施例,所述线性位置传感器包括具有两个时段的传感器线圈,并且在第一时段和第二时段之间构造极性转换。本领域技术人员将理解,位置传感器可以形成有具有任意时段数的接收传感器,并且其中可以如上文所讨论的那样在沿接收线圈的其他位置或沿位置传感器的多个位置构造极性转换。这种结构可以被形成为提供除图3所示以外的其它各种形状的响应曲线。
47.图7a和图7b示出了根据一些实施例的位置传感器400的操作。图7a示出了传感器线圈406和408中电流环路的极性。极性指定彼此相对,并且除了指示相反极性的电流环路外,正极(+)极性和负极(
–
)极性的指定是任意的,仅为便于解释。此外,为了清楚起见,传感器线圈406和408被分开示出,而不是像它们在位置传感器中那样重叠。图7a和图7b进一步示出了两时段位置传感器,其中相位改变发生在第一时段和第二时段之间,如图4至图6所示那样。
48.极性反映了电流在传感器线圈的截面中的圆形方向。例如,如图5所示,余弦线圈406包括迹线518和514,它们在一起形成大致圆形的结构,其中在任何给定时间的电流流动是在特定方向(顺时针或逆时针)上。在传统的接收线圈中,传感器线圈的相邻环路具有在相反方向上的电流流动,从而在该截面中产生特定的极性关系。在传统的传感器线圈中,极性在线圈结构的每个相邻环路中发生改变。然而,根据本发明的实施例,在沿着传感器线圈的至少一个点上,极性从传统进程中被切换,从而使两个相邻的环路具有相同的极性,或者
一个环路被分割以在每个半环路中提供不同的极性。
49.根据本发明的实施例,图7a示出了余弦线圈406,余弦线圈406具有正极性的第一环路702和具有负极性的相邻环路704。在极性改变424处,存在硬接线的极性改变,并且与环路704相邻的环路706也具有负极性。因此,与环路706相邻的环路708具有正极性。当目标402跨线圈406移动时的余弦响应722在图7b中被示出。
50.类似地,图7a所示的正弦线圈408示出了与正弦线圈408的负极性环路712相邻的正极性半环路710。极性改变424发生在相邻环路中,如图7a所示,该相邻环路示出了具有正极性的半环路714和具有负极性的半环路716。相邻的环路718(相邻于半环路716)是正极性的,并且正弦线圈408的最后一个环路720是负极性的。当目标402跨线圈408移动时的正弦响应724和余弦响应722在图7b中被示出。线圈406和408中的极性改变被硬连线到这些线圈的迹线中。此外,图7a示出了余弦线圈406和408,其中极性改变发生在如下点:在该点处,形成线圈406的迹线具有最近定位而形成线圈408的迹线具有最宽间隔。尽管如此,但是极性改变可以在沿位置传感器400的其他点处形成。
51.图8a示出了如图4至图6所示的线性位置传感器400的前半时段中的正弦响应804和余弦响应802的模拟。图8b示出了通过图4至图7a所示的极性改变424的正弦响应804和余弦响应802。结果示出了在进行任何线性化之前的仿真工具。y值以电压为单位。然而,x轴表示指示位置的移动窗口。图9a示出了基于图8a模拟的正弦响应804和余弦响应802的前半时段期间的模拟目标位置与参考值的关系。如已知的,图9a所示的响应由正弦响应804和余弦响应802确定。除了斜率将与图9a所示相反,可以确定线性位置传感器400的后半时段具有类似的响应。图9b示出了第二时段前半部分的响应。如图9a和图9b二者所示,计算值和参考值都被示出,但都是相同的。
52.图4至图6示出了在余弦线圈406和正弦线圈408中的每一个中都具有相位改变424的线性位置传感器400。尽管所示的特定示例示出在两时段位置传感器400的第一时段420和第二时段422之间在余弦线圈406和正弦线圈408中都发生相位改变424,但在一些实施例中,可以在沿参考线圈430的任何位置处构造相位改变。此外,沿参考线圈430可以有多于一个的相位改变。此外,在一些实施例中,在沿参考线圈430的每个相位改变位置处,相位改变可仅位于余弦线圈406或正弦线圈408中的一个中。通过沿位置传感器400将相位改变定位在余弦线圈406和正弦线圈408的各自线圈中可产生各种响应曲线。
53.图4至图9示出了根据一些实施例的线性位置传感器400的实施例。这里概述的原理也可以结合在旋转位置传感器中。因此,根据一些实施例,公开了一种旋转位置传感器,其包括下面讨论的图10和图11b中的接收线圈中的极性改变。
54.图10示出了根据一些实施例的旋转位置传感器接收线圈1000的示例。还示出了发射线圈1030。如图10所示,接收线圈1000包括布置在圆形平面中的第一线圈1006和第二线圈1004,以操作为旋转位置传感器。发射线圈1030和接收线圈1000被形成在印刷电路板1032的顶侧和底侧上。此外,接收线圈1000示出线圈1004和1006中的极性改变区域1002,其中线圈1004和1006都被布置成产生极性改变。如图10所示,当线圈1004的迹线最窄而线圈1006的迹线最宽时,发生相位改变1002。在一些实施例中,当线圈1004的迹线最宽而线圈1006的迹线最窄时,可以发生相位改变1002。控制器(未示出)被配置成驱动发射线圈1030并从第一线圈1006和第二线圈1004接收信号,以便在目标(未示出)在接收线圈1000之上旋
转时提供位置响应。
55.如图10所示,第二线圈1004包括极性改变区域1002中的迹线1008、1010、1012和1014。在传统传感器阵列中,迹线1008将被连接到迹线1012,并且迹线1010将被连接到迹线1014。在图10所示的传感器线圈1000的实施例中,迹线1008被连接到迹线1010,并且迹线1014被连接到迹线1012,这在第二线圈1004中提供极性转换。
56.此外,第一线圈1006包括迹线1016、1018、1020和1022。在传统传感器阵列中,迹线1018和1016将被连接,并且迹线1020和1022将被连接。然而,根据图10所示的一些实施例的传感器线圈1000通过经由连接迹线1026将迹线1016与迹线1022连接以及经由连接迹线1024将迹线1018与迹线1020连接,来提供极性改变。注意,连接迹线1024和1026重叠,其中迹线1024主要形成在电路板1032的顶侧,而迹线1026形成在电路板1032的底侧。
57.因此,在根据一些实施例的接收线圈1000中,通过如上所述的迹线的物理连接,提供第一线圈1006和第二线圈1004二者中的极性改变。当目标(未示出)在极性改变之上通过时,输出响应根据角度来提供平坦区域以及正斜率和负斜率,这与根据一些实施例的的线性位置阵列中参考图7中所描述的情况类似。
58.图11a示出了形成在印刷电路板(pcb)1110上的旋转位置传感器1100。如图所示,旋转位置传感器1100包括定位于pcb 1110上的发射线圈1102和传感器线圈1108。如进一步所示,传感器线圈1108包括第一线圈1104和第二线圈1106。旋转位置传感器1100在线圈1104和1106的任一个中均不呈现极性转换。因此,图11a所示的旋转位置传感器将提供常规位置响应,例如,具有位于接收线圈1108之上的目标的角度位置的线性位置传感器。
59.相比之下,图11b示出了根据本发明的一些实施例的位置传感器1150。位置传感器1150包括形成在pcb 1170上的发射线圈1152、第一线圈1154和第二线圈1156。在图11b所示的实施例中,第二线圈1156包括区域1160中的极性改变。然而,第一线圈1154不包括极性改变。如图11b所示,第二线圈1156包括迹线1162、1164、1166和1168,其中迹线1162被连接到迹线1164,而迹线1166被连接到迹线1168,从而产生极性改变。在一些实施例中,极性改变可以被包括在第一线圈1154中、而不是第二线圈1156中。或者,如图10所示,极性改变被提供在第一线圈和第二线圈二者中。
60.图11b示出了当第二线圈1156的迹线具有最近间隔时发生的相位改变。在一些实施例中,相位改变可以发生在第二线圈1156的迹线具有最宽间隔时,在这种情况下,迹线如上文所讨论的那样与连接迹线连接。
61.图12a示出了针对位置传感器1150的示例的、根据角度位置的正弦响应1202和余弦响应1204,其中相位改变发生在正弦线圈(被标记为第二线圈1156)中。余弦线圈中没有类似的相位改变。因此,正弦响应1202呈现每隔180度的相位改变。图12b示出了所产生的根据角度位置的响应。
62.图12c示出了针对根据一些实施例的示例旋转传感器的、根据位置的响应。图12示出了位置参数1202,该位置参数1202示出了根据如图10所示的旋转位置传感器中的旋转角度的、所计算的响应与目标位置的关系。图12所示的spa信号1204是被定义为位置的arcoth(正弦/余弦)的空间角度。spa信号通常在校准和线性化之前,且直接来自线圈。如图12所示,根据角度的位置响应包括以第一斜率1204的响应、当目标穿过存在极性转换的区域时的平坦部分1206以及以与第一斜率1204的斜率相反的第二斜率1208的响应。
63.图13示出了根据本发明的一些实施例的旋转位置传感器1300的照片视图。旋转位置传感器1300可以是如图10或图11b所示的位置传感器。发射线圈和接收线圈被形成在印刷电路板(pcb)1302上的线圈1304中。如上所述,通常接收线圈包括第一线圈和第二线圈,通常被标记为正弦线圈和余弦线圈。根据本发明的实施例,接收线圈中的一个或两个接收线圈包括极性改变。极性改变被物理接线到线圈中。作为极性改变的结果,根据角度的输出响应具有第一斜率、平坦区域和第二斜率的时段。在大多数情况下,第二斜率是第一斜率的负斜率。图13进一步示出了被安装在旋转轴1310上的目标1308。轴1310被安装在pcb 1302上,使得目标1308在线圈1304之上旋转。
64.控制电路1306也可以被安装在印刷电路板1302上。控制电路1306为发射线圈供电并从接收线圈接收信号。控制电路1306还可以被配置为产生输出响应,该输出响应指示目标1308相对于线圈1304的接收线圈的位置。
65.提供上述详细描述是为了说明本发明的具体实施例,而不是旨在进行限制。本发明范围内的许多变化和修改是可能的。本发明在随附权利要求中被阐明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1