视觉检测装置的制作方法
1.本公开涉及视觉检测技术领域,具体涉及一种视觉检测装置。
背景技术:
2.近年来,随着生产技术的发展,产品的生产速度逐渐提高。随之而来的,生产出来的部分产品的质量可能无法达到要求。为了确定产品的质量是否满足要求,可以基于机器视觉对产品进行检测,视觉检测是指使用机器代替人眼来做测量和判断,具体是指通过图像采集装置采集被检测产品的图像,将图像传送给专用的图像处理系统,图像处理系统根据图像的像素分布、亮度、颜色等信息进行各种运算来抽取目标的特征,进而根据目标的特征确定产品的质量是否满足要求。
3.相关技术中,可以通过机械手、传送带或转盘承载被检测产品,以便基于机器视觉对被检测产品进行检测。但在通过机械手承载被检测产品时,由于机械手的基座位置固定,导致其运动范围有限,导致基于机器视觉对被检测产品进行检测的效率较低。而在通过传送带或转盘承载被检测产品时,需要在传送带、转盘上设置用于固定被检测产品的结构,从而导致被检测产品与传送带、转盘相对的一面的图像无法被图像采集装置采集到,从而降低了检测结果的准确率。
技术实现要素:
4.为了解决相关技术中的问题,本公开实施例提供一种视觉检测装置。
5.本公开实施例提供了一种视觉检测装置,包括驱动组件、导向组件、滚筒、支架以及图像采集组件;
6.导向组件与支架转动连接,导向组件包括贯穿导向组件的导向槽,滚筒设置于导向槽下方;
7.滚筒与支架转动连接,滚筒包括筒身以及设置于筒身外表面的外螺纹,筒身用于在滚筒转动时带动承载于筒身外表面的被检测产品转动,外螺纹用于在滚筒转动时推动承载于筒身外表面的被检测产品沿导向槽移动;
8.驱动组件与滚筒传动连接,驱动组件用于驱动滚筒转动;
9.图像采集组件设置于导向槽上方,图像采集组件用于采集沿导向槽移动的被检测产品的图像。
10.结合第一方面,本公开在第一方面的第一种实现方式中,导向槽的至少一个侧壁设置有多个导向齿。
11.结合第一方面的第一种实现方式,本公开在第一方面的第二种实现方式中,导向齿的数量nt、导向齿的齿长lt以及相邻的两个导向齿的齿间距dt满足0.8l<nt
×
lt+(nt
‑
1)
×
dt<l<nt
×
lt+(nt+1)
×
dt,其中l为被检测产品的长度。
12.结合第一方面的第一种实现方式,本公开在第一方面的第三种实现方式中,导向齿的齿长lt满足0.2dt<lt<0.4dt,和/或导向齿的齿宽wt满足0.4dia<wt<0.5dia,其中dia
为被检测产品的直径。
13.结合第一方面的第一种实现方式,本公开在第一方面的第四种实现方式中,导向齿的齿厚ht满足0.4dia<ht<0.5dia,其中dia为被检测产品的直径。
14.结合第一方面,本公开在第一方面的第五种实现方式中,导向槽的两个侧壁均设置有多个导向齿,两个侧壁中一个侧壁的导向齿与两个侧壁中另一个侧壁的导向齿间的距离dtp满足1.1l<dtp<1.2l,其中l为被检测产品的长度。
15.结合第一方面,本公开在第一方面的第六种实现方式中,筒身的直径diar以及外螺纹的螺距sp满足外螺纹的高度fh满足0.3dia<fh<0.4dia,其中dia为被检测产品的直径。
16.结合第一方面、第一方面的第一种至第七种实现方式中任一项,本公开在第一方面的第七种实现方式中,图像采集组件为面阵相机。
17.结合第一方面的第八种实现方式,本公开在第一方面的第八种实现方式中,面阵相机的镜头与被检测产品的轴心间的距离wd、面阵相机的实际视野区域的宽度wt、面阵相机的镜头焦距f、面阵相机的靶面宽度wb满足wd/wt=f/wb以及l+lr<wt,其中l为被检测产品的长度,lr为被检测产品每转动一周沿导向槽移动的距离。
18.结合第一方面、第一方面的第一种至第七种实现方式中任一项,本公开在第一方面的第九种实现方式中,驱动组件包括齿轮组以及步进电机,步进电机的外壳与支架连接,步进电机的驱动轴与齿轮组传动连接,滚筒与齿轮组传动连接。
19.本公开实施例提供的技术方案可以包括以下有益效果:
20.本公开实施例中,视觉检测装置,包括驱动组件、导向组件、滚筒、支架以及图像采集组件,导向组件与支架转动连接,导向组件包括贯穿导向组件的导向槽,滚筒设置于导向槽下方;滚筒与支架转动连接,滚筒包括筒身以及设置于筒身外表面的外螺纹,筒身用于在滚筒转动时带动承载于筒身外表面的被检测产品转动,外螺纹用于在滚筒转动时推动承载于筒身外表面的被检测产品沿导向槽移动;驱动组件与滚筒传动连接,驱动组件用于驱动滚筒转动;图像采集组件设置于导向槽上方,图像采集组件用于采集沿导向槽移动的被检测产品的图像。其中,当驱动组件驱动滚筒转动时,承载于筒身外表面的被检测产品在被设置于筒身外表面的外螺纹的推动下沿导向槽移动,设置于导向槽上方的图像采集组件可以采集沿导向槽移动的被检测产品朝向图像采集组件一面的图像,由于被检测产品沿导向槽移动的同时还在筒身的带动下转动,因此被检测产品各个面的图像均能够被图像采集组件采集到,使根据图像采集组件采集到的图像能够确定被检测产品各个面是否存在缺陷,从而在不降低检测效率的前提下提高了检测的准确率。
21.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
22.结合附图,通过以下非限制性实施方式的详细描述,本公开的其它特征、目的和优点将变得更加明显。在附图中:
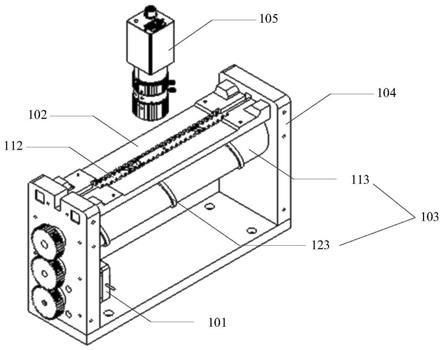
23.图1示出根据本公开一实施方式的视觉检测装置的结构示意图;
24.图2示出根据本公开一实施方式的导向组件的结构示意图;
25.图3示出根据本公开一实施方式的导向组件的纵向剖视图;
26.图4示出根据本公开一实施方式的滚筒的结构示意图;
27.图5示出根据本公开一实施方式的视觉检测装置的结构示意图;
28.图6示出根据本公开一实施方式的驱动组件的结构示意图;
29.图7示出根据本公开一实施方式的齿轮组的结构示意图。
具体实施方式
30.下文中,将参考附图详细描述本公开的示例性实施方式,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施方式无关的部分。
31.在本公开中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的标签、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他标签、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
32.另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的标签可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
33.在考虑本公开实施方式的应用场景时,发明人以视觉检测的场景进行研究,发明人研究了以下针对视觉检测的相关技术方案。
34.在一个方案中,在工业生产中,为了检测产品例如轴类产品的质量,可以通过机械手、传送带或转盘承载被检测产品,以便基于机器视觉对被检测产品进行检测。
35.其中,机械手的优点是灵活性高,例如多轴机械手可以完成复杂的高难度操作;其次机械手的通用性好,同一台机械手,通过软件编程即可实现不同的检测任务。但是机械手也有明显的缺点,机械手的基座位置固定,导致其运动范围有限,导致基于机器视觉对被检测产品进行检测的效率较低,
36.而对于传送带以及转盘来说,传送带以及转盘的优点是结构简单,成本低廉,并且检测速度较快,可以是机械手装置的3~10倍,但在检测的过程中,为了避免产品在被传送带或转盘承的过程中出现抖动,需要在传送带、转盘上设置用于固定被检测产品的结构,从而导致被检测产品与传送带、转盘相对的一面的图像无法被图像采集装置采集到,从而无法确定被检测产品与传送带、转盘相对的一面是否存在缺陷,降低了检测结果的准确率。
37.考虑到上述缺陷,本公开实施例提供的技术方案,包括驱动组件、导向组件、滚筒、支架以及图像采集组件,导向组件与支架转动连接,导向组件包括贯穿导向组件的导向槽,滚筒设置于导向槽下方;滚筒与支架转动连接,滚筒包括筒身以及设置于筒身外表面的外螺纹,筒身用于在滚筒转动时带动承载于筒身外表面的被检测产品转动,外螺纹用于在滚筒转动时推动承载于筒身外表面的被检测产品沿导向槽移动;驱动组件与滚筒传动连接,驱动组件用于驱动滚筒转动;图像采集组件设置于导向槽上方,图像采集组件用于采集沿导向槽移动的被检测产品的图像。其中,当驱动组件驱动滚筒转动时,承载于筒身外表面的被检测产品在被设置于筒身外表面的外螺纹的推动下沿导向槽移动,设置于导向槽上方的图像采集组件可以采集沿导向槽移动的被检测产品朝向图像采集组件一面的图像,由于被检测产品沿导向槽移动的同时还在筒身的带动下转动,因此被检测产品各个面的图像均能
够被图像采集组件采集到,使根据图像采集组件采集到的图像能够确定被检测产品各个面是否存在缺陷,从而在不降低检测效率的前提下提高了检测的准确率。
38.下面通过具体实施例详细介绍本公开实施例的细节。
39.根据本公开实施例提供的技术方案,本公开实施例提供了一种视觉检测装置,图1示出根据本公开一实施方式的视觉检测装置的结构示意图,如图1所示,视觉检测装置,包括驱动组件101、导向组件102、滚筒103、支架104以及图像采集组件105,导向组件102与支架104转动连接,导向组件102包括贯穿导向组件102的导向槽112,滚筒103设置于导向槽112下方,滚筒103与支架104转动连接,滚筒103包括筒身113以及设置于筒身113外表面的外螺纹123,筒身113用于在滚筒103转动时带动承载于筒身113外表面的被检测产品转动,外螺纹123用于在滚筒103转动时推动承载于筒身113外表面的被检测产品沿导向槽112移动;驱动组件101与滚筒103传动连接,驱动组件101用于驱动滚筒103转动,图像采集组件105设置于导向槽112上方,图像采集组件105用于采集沿导向槽112移动的被检测产品的图像。
40.需要说明的是,本公开实施例中的被检测产品可以为能够在筒身的带动下转动的产品,例如外形为圆形的产品、外形为椭圆形的产品、外形为圆柱形的轴类产品等,本公开对此不做具体限定。为了方便理解,本公开实施例以被检测产品为轴类产品为例进行说明。
41.本公开实施例提供了一种视觉检测装置,包括驱动组件、导向组件、滚筒、支架以及图像采集组件,导向组件与支架转动连接,导向组件包括贯穿导向组件的导向槽,滚筒设置于导向槽下方;滚筒与支架转动连接,滚筒包括筒身以及设置于筒身外表面的外螺纹,筒身用于在滚筒转动时带动承载于筒身外表面的被检测产品转动,外螺纹用于在滚筒转动时推动承载于筒身外表面的被检测产品沿导向槽移动;驱动组件与滚筒传动连接,驱动组件用于驱动滚筒转动;图像采集组件设置于导向槽上方,图像采集组件用于采集沿导向槽移动的被检测产品的图像。其中,当驱动组件驱动滚筒转动时,承载于筒身外表面的被检测产品在被设置于筒身外表面的外螺纹的推动下沿导向槽移动,设置于导向槽上方的图像采集组件可以采集沿导向槽移动的被检测产品朝向图像采集组件一面的图像,由于被检测产品沿导向槽移动的同时还在筒身的带动下转动,因此被检测产品各个面的图像均能够被图像采集组件采集到,使根据图像采集组件采集到的图像能够确定被检测产品各个面是否存在缺陷,从而在不降低检测效率的前提下提高了检测的准确率。
42.在本公开的一个实施例中,图2示出根据本公开一实施方式的导向组件的结构示意图。如图2所示,导向槽112的至少一个侧壁设置有多个导向齿1121。
43.通过在导向槽的至少一个侧壁设置多个导向齿,可以使被检测产品在沿导向槽移动时,被检测产品的部分外表面与导向齿接触,被检测产品剩余部分的外表面不会与导向齿接触,确保图像采集组件所采集的被检测产品的图像中,被检测产品的外表面能够被检测出来,以便于根据检测结果获取被检测产品的尺寸,从而确定被检测产品的尺寸是否满足要求,提高了检测的准确率。
44.在本公开的一个实施例中,如图2所示,导向齿1121的数量nt、导向齿1121的齿长lt 302以及相邻的两个导向齿1121的齿间距dt 303满足0.8l<nt
×
lt+(nt
‑
1)
×
dt<l<nt
×
lt+(nt+1)
×
dt,其中l 201为被检测产品200的长度。
45.其中,导向槽的一个侧壁上在被检测产品的长度范围内所设置的导向齿的数量可
以为5个。
46.通过基于被检测产品的长度限定导向齿的数量、导向齿的齿长以及相邻的两个导向齿的齿间距,可以确保导向齿即不会因过于密集而影响检测结果,同时也确保导向齿也不会因过于稀疏而导致被检测产品在沿导向槽移动的过程中被导向齿卡住,使被检测产品能够平滑移动,提高了检测的准确率与效率。
47.本公开的一个实施例中,如图2所示,导向齿1121的齿长lt 302满足0.2dt<lt<0.4dt,和/或导向齿1121的齿宽wt 304满足0.4dia<wt<0.5dia,其中dia为被检测产品200的直径。
48.通过基于被检测产品的直径限定导向齿的齿长和/或导向齿的齿宽,可以确保通过相邻两个导向齿之间的齿缝射入的光线的通光量足够,使图像采集组件所采集的被检测产品的图像足够清晰,提高了检测的准确率。
49.在本公开的一个实施例中,图3示出根据本公开一实施方式的导向组件的纵向剖视图。如图3所示,导向齿1121的齿厚ht 305满足0.4dia<ht<0.5dia,其中dia为被检测产品200的直径。
50.通过基于被检测产品的直径限定导向齿的齿厚,可以在被检测产品沿导向槽移动时,减弱导向槽侧壁的导向齿对被检测产品的影响,同时又不至于使产品在滚动过程中导向槽,提高了检测效率。
51.在本公开的一个实施例中,如图2所示,导向槽112的两个侧壁均设置有多个导向齿1121,两个侧壁中一个侧壁的导向齿1121与两个侧壁中另一个侧壁的导向齿1121间的距离dtp 306满足1.1l<dtp<1.2l,其中l 201为被检测产品200的长度。
52.通过在导向槽的两个侧壁均设置多个导向齿,并基于被检测产品的长度限定两个侧壁中一个侧壁的导向齿与两个侧壁中另一个侧壁的导向齿间的距离,可以确保导向槽中的被检测产品能够在筒身的带动下平稳转动的同时,被检测产品不会脱离导向槽,提高了检测效率。
53.在本公开的一个实施例中,图4示出根据本公开一实施方式的滚筒的结构示意图,如图4所示,筒身113的直径diar 1131以及外螺纹123的螺距sp 1231满足外螺纹123的高度fh 1232满足0.3dia<fh<0.4dia,其中dia为被检测产品200的直径。
54.通过基于被检测产品的直径限定筒身直径、外螺纹的螺距以及外螺纹的高度,可以确保产品在外螺纹的推动下沿导向槽平稳的移动,还能够在筒身的带动下稳定转动,且被检测产品在转动的过程中不会与筒身的外表面分离,提高了检测的效率。
55.在本公开的一个实施例中,图像采集组件105为面阵相机。
56.在本公开的一个实施例中,图5示出根据本公开一实施方式的视觉检测装置的结构示意图,如图1以及图5所示,面阵相机115的镜头与被检测产品200的轴心间的距离wd 1151、面阵相机的实际视野区域的宽度wt 1152、面阵相机的镜头焦距f、面阵相机的靶面宽度wb 1153满足wd/wt=f/wb以及l+lr<wt,其中l 201为被检测产品200的长度,lr为被检测产品200每转动一周沿导向槽移动的距离。
57.通过限定面阵相机的镜头与被检测产品的轴心间的距离、面阵相机的实际视野区
域的宽度、面阵相机的镜头焦距、面阵相机的靶面宽度,可以确保在被检测产品转动一周的过程中,被检测产品均位于实际视野区域中,提高了检测的准确率。
58.在本公开的一个实施例中,面阵相机的镜头为低畸变镜头,可以减少实际视野区域在图像采集组件所采集的画面中的畸变。
59.在本公开的一个实施例中,图6示出根据本公开一实施方式的驱动组件的结构示意图,如图6所示,驱动组件包括齿轮组1011以及步进电机,步进电机的外壳1112与支架连接,步进电机的驱动轴1212与齿轮组1011传动连接,滚筒与齿轮组1011传动连接。
60.在本公开的一个实施例中,图7示出根据本公开一实施方式的齿轮组的结构示意图,如图7所示,齿轮组为由主动轮401以及两个从动轮402构成的三齿轮系统,步进电机的驱动轴与主动轮401连接,各齿轮的齿数相同,且各齿轮间相互的传动比为1:1,确保各齿轮传递相同的扭矩,且各齿轮转动的速度相同,同时又确保滚筒转动方向与主动轮方向保持一致,便于在滚筒体积过大的情况下布置视觉检测装置中的各个组件。
61.在本公开的一个实施例中,步进电机的扭矩t满足t>0.5n
·
m,从而可以确保步进电机能在低速转动的情况下平稳的驱动齿轮组及滚筒。
62.以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1