一种消除加速度计绝对测量漂移的方法
1.本发明涉及传感器技术领域,具体涉及一种消除加速度计绝对测量漂移的方法。
背景技术:
2.目前测量一点位移可采用激光位移传感器或者超声波传感器直接测量,也可以先测量加速度数据再进行数值积分或者频域积分计算位移。数值积分法是对一段时间内的加速度数据插值求积得到该时间段内各个时刻的速度,再由速度插值求积得到该时间段内各个时刻的位移。频域积分方法利用了谐波的位移函数等于加速度函数除以负的谐波圆频率的平方这一关系,在频域对代表加速度各个频率分量的复数做数乘运算,将得到频域位移信号变换为时域位移信号.
3.加速度数据做数值积分求位移的方法存在很大的误差。第一,每一步积分都累计了前一步的误差,每一次积分也累计了前一次的误差,这包括了截断误差和插值带来的误差;对于频域积分而言,由于傅里叶变换可能引起信号的泄露,一段加速度信号做傅里叶变换可能产生一些低频误差,这些误差在频域积分时会被显著地放大。因而这种算法往往不能求出正确的位移。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供了一种消除加速度计绝对测量漂移的方法。
5.为了达到上述发明目的,本发明采用的技术方案为:
6.一种消除加速度计绝对测量漂移的方法,包括如下步骤:
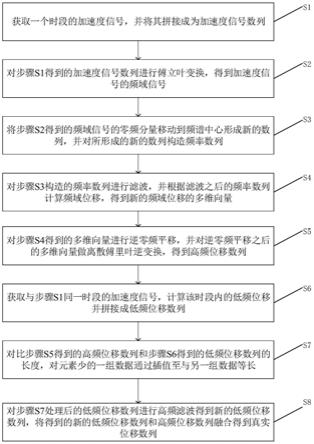
7.s1、获取一个时段的加速度信号,并将其拼接成为加速度信号数列;
8.s2、对步骤s1得到的加速度信号数列进行傅立叶变换,得到加速度信号的频域信号;
9.s3、将步骤s2得到的频域信号的零频分量移动到频谱中心形成新的数列,并对所形成的新的数列构造频率数列;
10.s4、对步骤s3构造的频率数列进行滤波,并根据滤波之后的频率数列计算频域位移,得到新的频域位移的多维向量;
11.s5、对步骤s4得到的多维向量进行逆零频平移,并对逆零频平移之后的多维向量做离散傅里叶逆变换,得到高频位移数列;
12.s6、获取与步骤s1同一时段的加速度信号,计算该时段内的低频位移并拼接成低频位移数列;
13.s7、对比步骤s5得到的高频位移数列和步骤s6得到的低频位移数列的长度,对元素少的一组数据通过插值至与另一组数据等长;
14.s8、对步骤s7处理后的低频位移数列进行高频滤波得到新的低频位移数列,将得到的新的低频位移数列和高频位移数列融合得到真实位移数列。
15.进一步的,所述步骤s2中加速度信号的频域信号表示为:
[0016][0017]
其中,a(n)为加速度信号中的元素,a(k)为加速度信号的频域信号中的元素,k为元素索引,n为元素个数;
[0018]
a(k)和a(n
‑
k)表示频率为的信号分量,f
s
为加速度信号的采样频率。
[0019]
进一步的,所述步骤s3中频域信号的零频分量移动到频谱中心形成新的数列具体方式为:
[0020]
n为偶数时,当时,a0中的元素当时,a0中的元素n=0,1,...,n
‑
1;
[0021]
n为奇数时,当时,a0中的元素当时,a0中的元素n=0,1,...,n
‑
1;
[0022]
其中,a0为新的数列,a0(n)为a0中的元素。
[0023]
进一步的,所述步骤s3中对所形成的新的数列构造频率数列的方式为:
[0024]
当n为偶数时,f中的元素n=0,1,...,n
‑
1;
[0025]
当n为奇数时,f中的元素n=0,1,...,n
‑
1;
[0026]
其中f表示频率数列,f(n)为f中的元素。
[0027]
进一步的,所述步骤s4中滤波的方式为:
[0028]
对f中的每个元素,若|f(n)|<f
t
,则令a0中的对应元素a0(n)=0;若|f(n)|≥f
t
,则保留对应的a0(n)的数值,其中f
t
为滤波阈值频率。
[0029]
进一步的,所述步骤s4中频域位移的多维向量表示为:
[0030][0031]
其中,d0(n)为新的频域位移的多维向量中的元素,a0(n)为经过滤波之后的频率数列中的元素,且当f(n)=0时,d0(n)=0。
[0032]
进一步的,所述步骤s5中多维向量进行逆零频平移的具体方式为:
[0033]
n为偶数时,当时,d中的元素当时,d0中的元素n=0,1,...,n
‑
1;
[0034]
n为奇数时,当时,d中的元素当
时,d中的元素n=0,1,...,n
‑
1。
[0035]
进一步的,所述步骤s5中高频位移数列表示为:
[0036][0037]
其中,d(n)为高频位移数列中的元素,d(k)为新的频域位移的多维向量中的第k个元素。
[0038]
进一步的,所述步骤s8中真实位移数列的表示方式为:
[0039]
m(n)=d(n)+u(n);
[0040]
其中,m(n)为真实位移数列中的元素,u(n)为新的低频位移数列中的元素,d(n)为高频位移数列中的元素
[0041]
本发明具有以下有益效果:
[0042]
1、融合了加速度数据计算出的高频位移和滤波后的低频位移,得出准确的位移。
[0043]
2、本方法基于傅里叶变换,目前傅里叶变换相关的数值方法非常成熟,容易获取。同时本方法逻辑清晰,步骤简单,易于编程实现。
[0044]
3、与传统数值积分方法不同,本方法由加速度直接计算出位移,没有引入中间量,避免了误差的传递。
附图说明
[0045]
图1为发明消除加速度计绝对测量漂移的方法的流程示意图。
[0046]
图2为本发明实施例实验一的结果示意图。
[0047]
图3为本发明实施例实验二的结果示意图。
[0048]
图4为本发明实施例实验三的结果示意图。
具体实施方式
[0049]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0050]
一种消除加速度计绝对测量漂移的方法,其特征在于,包括如下步骤:
[0051]
s1、获取一个时段的加速度信号,并将其拼接成为加速度信号数列;
[0052]
对于本实施例而言,通过加速度计直接测量一段时间内测点的加速度信号,得到一个长度为n数列,记为a,a中每个元素a(n)代表n时刻测点的加速度数值,n=0,1,...,n
‑
1。
[0053]
s2、对步骤s1得到的加速度信号数列进行傅立叶变换,得到加速度信号的频域信号;
[0054]
对于本实施例而言,对a做离散傅里叶变换,得到加速度的频域信号,长度为n,记为a,a中的每个元素k=0,1,...,n
‑
1。其中,a(k)和a(n
‑
k)表
示频率为的信号分量,f
s
为加速度信号的采样频率。
[0055]
s3、将步骤s2得到的频域信号的零频分量移动到频谱中心形成新的数列,并对所形成的新的数列构造频率数列;
[0056]
本实施例里,将加速度频域信号的零频分量移动到频谱中心,形成一个新的数列,长度为n,记为a0。
[0057]
对于n为偶数的情况,当时,a0中的元素当时,a0中的元素n=0,1,...,n
‑
1;
[0058]
对于n为奇数的情况,当时,a0中的元素当时,a0中的元素n=0,1,...,n
‑
1;
[0059]
构造一个代表a0中各个元素对应的频率的等差数列,长度为n,记为f。
[0060]
对于n为偶数的情况,f中的元素n=0,1,...,n
‑
1;
[0061]
对于n为奇数的情况,f中的元素n=0,1,...,n
‑
1。
[0062]
s4、对步骤s3构造的频率数列进行滤波,并根据滤波之后的频率数列计算频域位移,得到新的频域位移的多维向量;
[0063]
在本实施例里,对加速度信号滤波。对于f中的每个元素,若|f(n)|<f
t
,则令步骤s3得到的a0中的对应元素a0(n)=0;若|f(n)|≥f
t
,不做处理,n=0,1,...,n
‑
1,其中f
t
为滤波的阈值频率,可根据实际指定。
[0064]
然后进行频域位移计算,构造一个新的n维向量d0,令d0中每个元素其中a0(n)是经过步骤5处理后的,特别地,当f(n)=0时,令d0(n)=0,n=0,1,...,n
‑
1。
[0065]
s5、对步骤s4得到的多维向量进行逆零频平移,并对逆零频平移之后的多维向量做离散傅里叶逆变换,得到高频位移数列;
[0066]
在本实施例里,逆零频平移d0得到d,
[0067]
对于n为偶数的情况,当时,d中的元素当时,d0中的元素n=0,1,...,n
‑
1;
[0068]
对于n为奇数的情况,当时,d中的元素当时,d中的元素n=0,1,...,n
‑
1。
[0069]
然后对d做离散傅里叶逆变换,计算出高频位移d,d中每个元素
d(n)代表n时刻测点的高频位移数值,n=0,1,...,n
‑
1。
[0070]
s6、获取与步骤s1同一时段的加速度信号,计算该时段内的低频位移并拼接成低频位移数列;
[0071]
本实施例中采用其他方法,如水准测量直接测量同一时间段的低频位移,得到一个长度为l数列,记为u0,u0中每个元素u0(n)代表n时刻测点的低频位移数值,n=0,1,...,l
‑
1。
[0072]
s7、对比步骤s5得到的高频位移数列和步骤s6得到的低频位移数列的长度,对元素少的一组数据通过插值至与另一组数据等长;
[0073]
对比步骤s5计算出高频位移数列d,对数据点少的一组数据样条插值至与另一组数据等长。插值后两组数据的长度相同,仍记为u0和d,长度记为k,k=max(n,l)。
[0074]
s8、对步骤s7处理后的低频位移数列进行高频滤波得到新的低频位移数列,将得到的新的低频位移数列和高频位移数列融合得到真实位移数列。
[0075]
对于步骤7处理后的低频位移u0,采用与前述方法相同的办法,滤除其高频成分,滤波阈值为f
t
,此处f
t
与步骤5中的f
t
相同,得到新的低频位移信号记为u。叠加u与d得到融合后的位移,记为m,m中每个元素m(n)=d(n)+u(n),n=0,1,...,k
‑
1。
[0076]
实例1.模拟信号
[0077]
步骤一:模拟两个位移信号叠加,其中高频位移信号的初项为0,振幅为10mm、频率为4hz;低频位移信号的初相为振幅为3mm、频率为0.5hz。信号长度10s,采样频率为100hz。
[0078]
步骤二:对叠加后的位移信号求导两次得到加速度信号。
[0079]
步骤三:按照本方法用步骤1得出的加速度信号求解位移,滤波阈值f
t
取1hz,将计算结果与模拟信号对比,结果如附图2。
[0080]
实例2.模拟信号
[0081]
步骤一:改变实例1中的参数,模拟与实例一相反的情况,即低频位移信号振幅小而高频位移信号振幅大。高频位移信号的初项为0,振幅为2mm、频率为5hz,低频位移信号的初项为振幅为20mm、频率为0.7hz。信号长度10s,采样频率为20hz。
[0082]
步骤二:对叠加后的位移信号求导两次得到加速度信号。
[0083]
步骤三:按照本方法用步骤1得出的加速度信号求解位移,滤波阈值f
t
取0.8hz,将计算结果与模拟信号对比,结果如附图3。
[0084]
实例3.实测信号
[0085]
步骤一:采用激光位移计、加速度计和某种低频位移计实际测量一时段内某振动装置的位移。
[0086]
步骤二:按照本方法融合加速度信号计算出的高频位移与低频位移计测出的位移,滤波阈值f
t
取0.3hz,将计算结果与激光位移计的实测数据对比,结果如附图4。
[0087]
以上三个实例表明本方法可以融合低频位移信号和加速度信号计算出准确的位移。
[0088]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0089]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0090]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0091]
本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
[0092]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1