一种数码相机探测大气能见度的误差分析方法
1.本发明属于气象和电子领域,特别涉及一种适用于高精度探测大气能见度时选用相机的误差分析方法。
背景技术:
2.大气能见度是重要的天气气象观测要素,严重制约着航空、航海、路上交通以及军事活动。目前,常用的大气能见度测量仪器主要是基于散射和透射技术体制的探测仪。随着成像和数据处理等技术的快速发展,数字摄像法由于成本低、操作简单、对场地要求低等优点,也被广泛应用于能见度的监测研究中。现有的数字摄像监测能见度技术常采用普通的数码相机进行图像采集,不同的相机性能直接影响着最终的能见度探测精度,若在试验前对不同的相机性能影响的能见度探测精度进行误差分析,进而选用适宜的图像采集相机,可以提高数字摄像法进行能见度探测的精度,为图像法进行能见度的高精测量提供参考借鉴。
3.由于现有数字摄像法进行大气能见度探测业务化应用还不成熟,主要是探测精度不高,设备性能影响、背景环境影响较大,基线无法调整。其中成像设备进行图像采集得到的光强容易受到背景光线等影响,这就对相机的成像性能要求较高。常规做法并未考虑数码相机本身的成像性能,影响探测精度,目前还没有此类考虑误差影响的做法。
技术实现要素:
4.发明目的:针对以上问题,本发明提出一种适用于高精度探测大气能见度相机选用的误差分析方法,进而提高大气能见度测量的精度。
5.技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种数码相机探测大气能见度的误差分析方法,具体包括:
6.选取数码相机,根据相机的亮度准确性以及系统动态范围,得到亮度增益误差σ和亮度零点误差τ;
7.设定相机与目标板之间的基线距离d,设定归一化天空背景亮度l
g
和能见度mor理论值,代入能见度计算公式得到目标亮度l
t
理论值;
8.通过相机的亮度增益误差σ和亮度零点误差τ,分别计算目标亮度增益误差引起的能见度相对误差、目标亮度零点误差引起的能见度相对误差、天空背景亮度增益误差引起的能见度相对误差和天空背景亮度零点误差引起的能见度相对误差;最后合成大气能见度总的相对误差e;
9.在一定长度范围内间隔基线距离d设定大气能见度mor理论值,绘制该基线长度d下的所有能见度相对误差e随mor理论值变化的曲线。
10.进一步的,计算目标亮度增益误差引起的能见度相对误差,具体包括:
11.令l'
tz
为含亮度增益误差的目标亮度,由l'
tz
=l
t
(1+σ)计算得到,l
t
为目标亮度理论值,σ为系统准确性中亮度对应的增益误差;
12.将计算得到的含亮度增益误差的目标亮度的最大值和最小值分别记作l'
tz1
和l'
tz2
;
13.将l'
tz1
和l'
tz2
分别代入能见度计算公式,得到能见度值和
14.分别计算与mor理论值之间的最大相对误差
[0015][0016]
作为目标亮度增益误差引起的能见度相对误差。
[0017]
进一步的,计算目标亮度零点误差引起的能见度相对误差,具体包括:
[0018]
令l'
t0
为含亮度零点误差的目标亮度,由l'
t0
=l
t
(1+τ)计算得到,l
t
为目标亮度理论值,τ为系统动态范围对应的零点漂移误差;
[0019]
将计算得到的含亮度零点误差的目标亮度的最大值和最小值分别记作l'
t01
和l'
t02
;
[0020]
将l'
t01
和l'
t02
分别代入能见度计算公式,得到能见度值和
[0021]
分别计算与mor理论值之间的最大相对误差
[0022][0023]
作为目标亮度零点误差引起的能见度相对误差。
[0024]
进一步的,计算天空背景亮度增益误差引起的能见度相对误差,具体包括:
[0025]
令l'
gz
为含天空背景亮度增益误差的目标亮度,由l'
gz
=l
g
(1+σ)计算得到,l
g
为天空背景亮度,σ为系统准确性中亮度对应的增益误差;
[0026]
将计算得到的含天空背景亮度增益误差的目标亮度的最大值和最小值分别记作l'
gz1
和l'
gz2
;
[0027]
将l'
gz1
和l'
gz2
分别代入能见度计算公式,得到能见度值和
[0028]
分别计算与mor理论值之间的最大相对误差
[0029][0030]
作为天空背景亮度增益误差引起的能见度相对误差。
[0031]
进一步的,计算天空背景亮度零点误差引起的能见度相对误差,具体包括:
[0032]
令l'
g0
为含天空背景亮度零点误差的目标亮度,由l'
g0
=l
g
(1+τ)计算得到,l
g
为天空背景亮度,τ为系统动态范围对应的零点漂移误差;
[0033]
将计算得到的含天空背景亮度零点误差的目标亮度的最大值和最小值分别记作l'
g01
和l'
g02
;
[0034]
将l'
g01
和l'
g02
分别代入能见度计算公式,得到能见度值和
[0035]
分别计算与mor理论值之间的最大相对误差
[0036][0037]
作为天空背景亮度零点误差引起的能见度相对误差。
[0038]
进一步的,合成能见度总的相对误差为
[0039][0040]
其中为目标亮度增益误差引起的能见度相对误差,为目标亮度零点误差引起的能见度相对误差,为天空背景亮度增益误差引起的能见度相对误差,为天空背景亮度零点误差引起的能见度相对误差。
[0041]
有益效果:与现有技术相比,本发明的技术方案具有以下有益的技术效果:
[0042]
本发明所述一种数码相机探测大气能见度的误差分析方法,利用不同相机本身的性能对大气能见度测量精度的影响进行误差分析,可以对利用数字摄像法进行高精度的能见度探测选用适宜的数码相机提供参考借鉴,从而实现高精度的能见度探测。
附图说明
[0043]
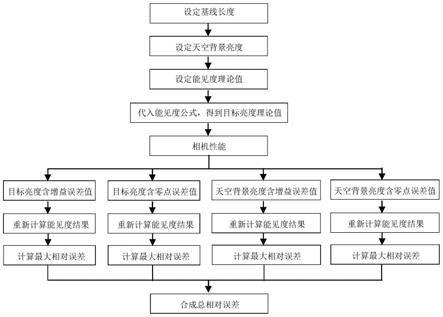
图1是本发明的分析方法流程图;
[0044]
图2是目标亮度增益误差和零点误差分析结果曲线图;
[0045]
图3是天空背景亮度增益误差和零点误差分析结果曲线图;
[0046]
图4是本发明的相机探测大气能见度的合成总相对误差曲线图。
具体实施方式
[0047]
下面结合附图和实施例对本发明的技术方案作进一步的说明。
[0048]
本发明所述的一种数码相机探测大气能见度的误差分析方法,如图1所示,包括:
[0049]
步骤1、选取数码相机,根据相机的亮度准确性以及系统动态范围,得到亮度增益误差和亮度零点误差;所述相机下面设有立柱和滑轨,或者采用车载、机载相机。
[0050]
本实施例选取柯尼卡美能达的成像色度计/光度计,相机性能参数如下表所示,其系统准确性中亮度对应的增益误差为σ=
±
3%,动态范围(61.4db,表示图像中所包含的从“最暗”至“最亮”的差值)对应的零点漂移误差τ为:
[0051]
[0052][0053]
间隔设定相机与目标板之间的基线距离d,如d=10m,设定归一化天空背景亮度l
g
,如l
g
=0.8,设定大气能见度mor理论值,代入能见度计算公式得到目标亮度l
t
理论值;
[0054]
所述能见度计算公式为:
[0055][0056]
步骤2、通过相机的亮度增益误差和亮度零点误差,分别计算目标亮度增益误差引起的能见度相对误差、目标亮度零点误差引起的能见度相对误差、天空背景亮度增益误差引起的能见度相对误差和天空背景亮度零点误差引起的能见度相对误差。
[0057]
步骤2.1、计算目标亮度增益误差引起的能见度相对误差,具体包括:
[0058]
令l'
tz
为含亮度增益误差的目标亮度,由l'
tz
=l
t
(1+σ)计算得到,l
t
为目标亮度理论值,σ为系统准确性中亮度对应的增益误差;
[0059]
将计算得到的含亮度增益误差的目标亮度的最大值和最小值分别记作l'
tz1
和l'
tz2
;
[0060]
将l'
tz1
和l'
tz2
分别代入能见度计算公式,得到能见度值和
[0061]
分别计算与mor理论值之间的最大相对误差
[0062][0063]
作为目标亮度增益误差引起的能见度相对误差,如图2所示。
[0064]
步骤2.2、计算目标亮度零点误差引起的能见度相对误差,具体包括:
[0065]
令l'
t0
为含亮度零点误差的目标亮度,由l'
t0
=l
t
(1+τ)计算得到,l
t
为目标亮度理
论值,τ为系统动态范围对应的零点漂移误差;
[0066]
将计算得到的含亮度零点误差的目标亮度的最大值和最小值分别记作l'
t01
和l'
t02
;
[0067]
将l'
t01
和l'
t02
分别代入能见度计算公式,得到能见度值和
[0068]
分别计算与mor理论值之间的最大相对误差
[0069][0070]
作为目标亮度零点误差引起的能见度相对误差,如图2所示。
[0071]
步骤2.3、计算天空背景亮度增益误差引起的能见度相对误差,具体包括:
[0072]
令l'
gz
为含天空背景亮度增益误差的目标亮度,由l'
gz
=l
g
(1+σ)计算得到,l
g
为天空背景亮度,σ为系统准确性中亮度对应的增益误差;
[0073]
将计算得到的含天空背景亮度增益误差的目标亮度的最大值和最小值分别记作l'
gz1
和l'
gz2
;
[0074]
将l'
gz1
和l'
gz2
分别代入能见度计算公式,得到能见度值和
[0075]
分别计算与mor理论值之间的最大相对误差
[0076][0077]
作为天空背景亮度增益误差引起的能见度相对误差,如图3所示。
[0078]
步骤2.4、计算天空背景亮度零点误差引起的能见度相对误差,具体包括:
[0079]
令l'
g0
为含天空背景亮度零点误差的目标亮度,由l'
g0
=l
g
(1+τ)计算得到,l
g
为天空背景亮度,τ为系统动态范围对应的零点漂移误差;
[0080]
将计算得到的含天空背景亮度零点误差的目标亮度的最大值和最小值分别记作l'
g01
和l'
g02
;
[0081]
将l'
g01
和l'
g02
分别代入能见度计算公式,得到能见度值和
[0082]
分别计算与mor理论值之间的最大相对误差
[0083][0084]
作为天空背景亮度零点误差引起的能见度相对误差,如图3所示。
[0085]
步骤3、合成大气能见度总的相对误差e。
[0086][0087]
其中为目标亮度增益误差引起的能见度相对误差,为目标亮度零点误差引起的能见度相对误差,为天空背景亮度增益误差引起的能见度相对误差,为天空背景亮度零点误差引起的能见度相对误差。
[0088]
步骤4、从10m到2000m间隔10m设定大气能见度mor理论值,重复步骤2
‑
步骤3,绘制
该基线长度d=10m下的所有能见度相对误差e随mor理论值变化的曲线,如图4所示。
[0089]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1