一种LEO与GNSS融合精密单点定位方法及系统
一种leo与gnss融合精密单点定位方法及系统
技术领域
1.本发明涉及导航定位领域,特别是涉及一种leo与gnss融合精密单点定位方法及系统。
背景技术:
2.随着全球卫星导航系统(global navigation satellite system,gnss)的蓬勃发展,其定位、导航和授时(positioning navigation and timing,pnt)功能得到不断的扩展和深入,广泛应用于科学研究、生产、生活等方面。精密单点定位(precise point positioning,ppp)技术作为gnss精密定位的新发展技术之一,可以基于伪距观测值和载波双频载波相位观测值实现全球性、全天候的高精度定位,成为近年来卫星导航领域的研究热点。
3.目前,单系统ppp定位技术趋于成熟,多系统融合ppp定位技术弥补了单系统ppp定位可见卫星数较少的短板,显著提高了定位性能,然而,收敛时间仍旧过长,对ppp在实时场景中的应用有所限制。因此,定位性能仍有待提高。
技术实现要素:
4.基于此,本发明实施例提供一种leo与gnss融合精密单点定位方法及系统,以提高定位性能。
5.为实现上述目的,本发明提供了如下方案:
6.一种leo与gnss融合精密单点定位方法,包括:
7.获取观测数据和产品数据;所述观测数据包括leo卫星伪距观测值、leo卫星双频载波相位观测值、gnss卫星伪距观测值和gnss卫星双频载波相位观测值;所述产品数据包括精密星历、精密钟差、天线文件数据、地球自转参数和硬件延迟参数;
8.基于所述观测数据进行伪距单点定位,得到初始定位数据;所述初始定位数据包括测站三维坐标初值、卫星高度角和卫星方位角;
9.对所述产品数据进行误差修正,得到修正数据;
10.基于所述观测数据、所述初始定位数据和所述修正数据进行精密单点定位,得到定位结果。
11.可选的,所述基于所述观测数据进行伪距单点定位,得到初始定位数据,具体包括:
12.基于所述观测数据建立低轨增强gnss伪距单点定位函数模型;所述低轨增强gnss伪距单点定位函数模型包括伪距单点定位观测方程和高度角定权模型;
13.对所述低轨增强gnss伪距单点定位函数模型求解,得到所述初始定位数据。
14.可选的,所述基于所述观测数据、所述初始定位数据和所述修正数据进行精密单点定位,得到定位结果,具体包括:
15.对所述观测数据进行无电离层组合,得到无电离层组合观测值;
16.基于所述无电离层组合观测值、所述初始定位数据和所述修正数据建立低轨增强gnss精密单点定位模型;所述低轨增强gnss精密单点定位模型包括精密单点定位观测方程和高度角定权模型;
17.采用递归最小二乘法对所述低轨增强gnss精密单点定位模型求解,得到所述定位结果。
18.可选的,所述伪距单点定位观测方程为
[0019][0020][0021][0022]
其中,p
g
表示gps卫星伪距观测值;p
c
表示bds卫星伪距观测值;p
l
表示leo卫星伪距观测值;表示gps卫星的卫地距初值;表示bds卫星的卫地距初值;表示leo卫星的卫地距初值;c表示光速;dt
r
表示接收机钟差;表示gps与bds的接收机钟差之差;表示gps与leo的接收机钟差之差;dt
s
表示卫星钟差;t表示对流层误差;i
g
表示gps卫星的电离层误差;i
c
表示bds卫星的电离层误差;i
l
表示leo卫星的电离层误差;e
g
为gps卫星的其他误差之和;e
c
为bds卫星的其他误差之和;e
l
为leo卫星的其他误差之和;所述其他误差包括潮汐、地球自转、相对论、相位缠绕、天线相位偏差和多路径误差;ε
g
为gps卫星的观测噪声;ε
c
为bds卫星的观测噪声;ε
l
为leo卫星的观测噪声;a
g
为gps卫星的系数矩阵;a
c
为bds卫星的系数矩阵;a
l
为leo卫星的系数矩阵;x0=[x0,y0,z0]表示测站的初始化坐标的改正数。
[0023]
所述高度角定权模型为
[0024][0025]
表示观测值方差,表示伪距和双频载波相位观测值先验方差,θ表卫星高度角,α表示高度角阈值。
[0026]
可选的,所述精密单点定位观测方程为
[0027]
[0028]
其中,表示gps卫星消电离层组合伪距观测值;表示bds卫星消电离层组合伪距观测值;表示leo卫星消电离层组合伪距观测值;表示gps卫星消电离层组合双频载波相位观测值;表示bds卫星消电离层组合双频载波相位观测值;表示leo卫星消电离层组合伪双频载波相位观测值;表示gps卫星的卫地距初值;表示bds卫星的卫地距初值;表示leo卫星的卫地距初值;c表示光速;为吸收了gps卫星接收机端消电离层伪距硬件延迟的接收机钟差;为吸收了bds卫星接收机端消电离层伪距硬件延迟的接收机钟差;为吸收了leo卫星接收机端消电离层伪距硬件延迟的接收机钟差;t表示对流层误差;表示gps和bds的系统间偏差;表示gps和leo的系统间偏差;λ
g
表示gps卫星无电离层组合波长;λ
c
表示bds卫星无电离层组合波长;λ
l
表示leo卫星无电离层组合波长;为gps卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层组合模糊度参数;为bds卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层组合模糊度参数;为leo卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层组合模糊度参数;to
c,g
表示bds卫星与gps卫星之间钟差基准约束固有的时间差异;to
l,g
表示leo卫星与gps卫星之间钟差基准约束固有的时间差异;表示bds卫星消电离层组合接收机端的伪距硬件延迟;表示leo卫星消电离层组合接收机端的伪距硬件延迟;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;所述其他误差包括潮汐、地球自转、相对论、相位缠绕、天线相位偏差和多路径误差;表示gps的消电离层组合伪距观测噪声;表示bds的消电离层组合伪距观测噪声;表示leo的消电离层组合伪距观测噪声;表示gps的消电离层组合相位观测噪声;表示bds的消电离层组合相位观测噪声;表示leo的消电离层组合相位观测噪声;a
g
为gps卫星的系数矩阵;a
c
为bds卫星的系数矩阵;a
l
为leo卫星的系数矩阵;x=[x,y,z]表示初始定位数据的改正数。
[0029]
可选的,在所述获取观测数据和产品数据之后,还包括:
[0030]
对所述观测数据和所述产品数据的完整性进行质量检查;
[0031]
对质量检查后的双频载波相位观测值进行周跳探测,并对存在周跳的数据进行标记,得到预处理后的数据。
[0032]
可选的,所述对所述产品数据进行误差修正,得到修正数据,具体包括:
[0033]
对所述产品数据的接收机相关误差、传播路径相关误差和卫星相关误差进行误差校正,得到修正数据。
[0034]
本发明还提供了一种leo与gnss融合精密单点定位系统,包括:
[0035]
数据获取模块,用于获取观测数据和产品数据;所述观测数据包括leo卫星伪距观测值、leo卫星双频载波相位观测值、gnss卫星伪距观测值和gnss卫星双频载波相位观测值;所述产品数据包括精密星历、精密钟差、天线文件数据、地球自转参数和硬件延迟参数;
[0036]
伪距单点定位模块,用于基于所述观测数据进行伪距单点定位,得到初始定位数据;所述初始定位数据包括测站三维坐标初值、卫星高度角和卫星方位角;
[0037]
误差修正模块,用于对所述产品数据进行误差修正,得到修正数据;
[0038]
精密单点定位模块,用于基于所述观测数据、所述初始定位数据和所述修正数据进行精密单点定位,得到定位结果。
[0039]
可选的,所述伪距单点定位模块,具体包括:
[0040]
第一模型构建单元,用于基于所述观测数据建立低轨增强gnss伪距单点定位函数模型;所述低轨增强gnss伪距单点定位函数模型包括伪距单点定位观测方程和高度角定权模型;
[0041]
第一求解单元,用于对所述低轨增强gnss伪距单点定位函数模型求解,得到所述初始定位数据。
[0042]
可选的,所述精密单点定位模块,具体包括:
[0043]
处理单元,用于对所述观测数据进行无电离层组合,得到无电离层组合观测值;
[0044]
第二模型构建单元,用于基于所述无电离层组合观测值、所述初始定位数据和所述修正数据建立低轨增强gnss精密单点定位模型;所述低轨增强gnss精密单点定位模型包括精密单点定位观测方程和高度角定权模型;
[0045]
第二求解单元,用于采用递归最小二乘法对所述低轨增强gnss精密单点定位模型求解,得到所述定位结果。
[0046]
与现有技术相比,本发明的有益效果是:
[0047]
本发明实施例提出了一种leo与gnss融合精密单点定位方法及系统,基于leo卫星伪距观测值、leo卫星双频载波相位观测值、gnss卫星伪距观测值和gnss卫星双频载波相位观测值进行伪距单点定位,得到初始定位数据;然后,基于观测数据、初始定位数据和修正数据进行精密单点定位,得到定位结果。本发明将低轨道地球卫星(leo)和高轨gnss融合,由于低轨卫星导航信号强、抗干扰性好、运行速度快,因此,提高了抗干扰性,加快了收敛时间,从而提升了定位性能。
附图说明
[0048]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0049]
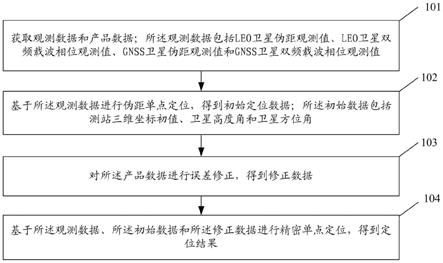
图1为本发明实施例提供的leo与gnss融合精密单点定位方法的流程图;
[0050]
图2为本发明实施例提供的leo与gnss融合精密单点定位方法的具体实现过程图;
[0051]
图3为本发明实施例提供的leo与gnss融合精密单点定位系统的结构图。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0053]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0054]
低轨卫星运动速度快,卫星几何构型变化快,可以有效加快收敛时间,因此,发展低轨道地球卫星(leo)星座与高轨gnss星座的融合定位对于实现快速精密定位有着重要价值。
[0055]
本实施例提供的leo与gnss融合精密单点定位方法,首先,基于伪距观测值进行低轨增强gnss(legnss)伪距单点定位,为后续低轨增强gnss精密单点定位提供满足一定精度的坐标初值。其次,进行低轨增强gnss精密单点定位,对leo和gnss观测值数据进行筛选,联合leo和gnss的伪距和载波相位观测数据以及误差修正,建立低轨增强gnss精密单点定位模型,进行未知参数的求解,得到定位结果。如图1所示,该leo与gnss融合精密单点定位方法,具体包括如下步骤:
[0056]
步骤101:获取观测数据和产品数据;所述观测数据包括leo卫星伪距观测值、leo卫星双频载波相位观测值、gnss卫星伪距观测值和gnss卫星双频载波相位观测值。
[0057]
所述产品数据为数据处理需要的辅助产品数据,其包括精密星历、精密钟差、天线文件数据、地球自转参数和硬件延迟参数,其中,观测数据、精密星历提供的精密轨道数据、天线文件数据都是通过仿真得到的。gnss包括北斗卫星导航系统(beidou navigation satellite system,bds)和全球定位系统(global positioning system,gps)。
[0058]
步骤102:基于所述观测数据进行伪距单点定位,得到初始定位数据;所述初始定位数据包括测站三维坐标初值、卫星高度角和卫星方位角。其中,卫星高度角和卫星方位角都是基于测站三维坐标初值和卫星坐标计算得到的。
[0059]
该步骤,具体为:
[0060]
基于伪距观测值,进行伪距单点定位,为精密单点定位提供满足一定精度的三维坐标初值,并计算出每颗卫星的高度角和方位角,为后续解算提供使用。具体包括如下步骤:
[0061]
1)基于所述观测数据建立低轨增强gnss伪距单点定位函数模型;所述低轨增强gnss伪距单点定位函数模型包括伪距单点定位观测方程和高度角定权模型。
[0062]
所述伪距单点定位观测方程为
[0063][0064]
其中,p
g
表示gps卫星伪距观测值;p
c
表示bds卫星伪距观测值;p
l
表示leo卫星伪距观测值;表示gps卫星的卫地距初值;表示bds卫星的卫地距初值;表示leo卫星
的卫地距初值,卫地距初值由卫星的坐标和测站的初始化坐标计算得到的;c表示光速;dt
r
表示接收机钟差;表示gps与bds的接收机钟差之差;表示gps与leo的接收机钟差之差;dt
s
表示卫星钟差;t表示对流层误差;i
g
表示gps卫星的电离层误差;i
c
表示bds卫星的电离层误差;i
l
表示leo卫星的电离层误差;e为其他误差之和,采用模型进行修正;e
g
为gps卫星的其他误差之和;e
c
为gps卫星的其他误差之和;e
l
为gps卫星的其他误差之和;所述其他误差包括潮汐、地球自转、相对论、相位缠绕、天线相位偏差和多路径等误差;ε
g
为gps卫星的观测噪声;ε
c
为bds卫星的观测噪声;ε
l
为leo卫星的观测噪声;a
g
为gps卫星的系数矩阵,该系数矩阵为由gps卫星坐标和测站坐标计算得到的单位旋转矢量;a
c
为bds卫星的系数矩阵,该系数矩阵为由bds卫星坐标和测站坐标计算得到的单位旋转矢量;a
l
为leo卫星的系数矩阵,该系数矩阵为由leo卫星坐标和测站坐标计算得到的单位旋转矢量;x0=[x0,y0,z0]表示测站的初始化坐标的改正数。
[0065]
随机模型能够反映各类观测值的精度水平,主要用来定权。对于同一系统之间卫星观测值定权,可以根据高度角大小建立随机模型,卫星截止高度角低时观测值精度会受到影响从而变差,所占权值也应相对较小。根据卫星位置和各个测站概略位置计算卫星的高度角,并根据卫星高度角和观测噪声确定其对应的随机模型,随机模型采用高度角定权模型。
[0066]
所述高度角定权模型为
[0067][0068]
表示观测值方差,表示伪距和双频载波相位观测值先验方差,可以根据先验经验值确定,θ表卫星高度角,α表示高度角阈值,一般设为30
°
。由高度角定权模型得到的观测值方差用于表征伪距观测值的精度。
[0069]
2)对所述低轨增强gnss伪距单点定位函数模型求解,经过迭代计算得到所述初始定位数据。具体的,由测站的初始化坐标和测站的初始化坐标的改正数x0=[x0,y0,z0],得到初始定位数据(伪距定位坐标)。
[0070]
步骤103:对所述产品数据进行误差修正,得到修正数据。
[0071]
该步骤,具体为:对所述产品数据的接收机相关误差、传播路径相关误差和卫星相关误差进行误差校正,得到修正数据。
[0072]
在实际应用中,误差校正的过程为:采用gfz分析中心提供的精密产品减小精密钟差的误差和精密星历提供的精密轨道数据的误差,基于高度角和方位角采用igs14.atx模型修正天线相位中心,基于高度角采用saastamoinen模型修正对流层干延迟,采用相位缠绕模型修正天线相位缠绕,采用iers conventions 2010技术协议中指定的模型修正相对论效应和固体潮,采用分析中心提供的dcb改正文件修正硬件延迟偏差,采用分析中心提供的erp文件修正地球自转偏差,接收机钟差、对流层湿延迟当作未知参数进行估计。
[0073]
步骤104:基于所述观测数据、所述初始定位数据和所述修正数据进行精密单点定位,得到定位结果。
[0074]
该步骤,具体为:
[0075]
首先进行无电离层组合,形成无电离层组合观测值;同时基于精密星历产品,建立低轨增强gnss精密单点定位模型;再对低轨增强gnss精密单点定位模型求解,得到定位结果。具体的:
[0076]
1)对所述观测数据中的仿真的原始双频载波相位观测值进行消电离层组合(if组合),得到无电离层组合观测值。
[0077]
2)基于所述无电离层组合观测值、所述初始定位数据和所述修正数据建立低轨增强gnss精密单点定位模型,其中,无电离层组合观测值在观测方程直接作为参数,初始定位数据即伪距单点定位得到的最终坐标,将其作为精密单点定位解算的定位初值,另外,在精密单点定位过程中,有些误差可以经过模型或精密产品进行改正,其他不能经过模型或精密产品进行改正的误差可作为未知参数和坐标值一起解算;所述低轨增强gnss精密单点定位模型包括精密单点定位观测方程和高度角定权模型。
[0078]
所述精密单点定位观测方程为
[0079][0080]
其中,表示gps卫星消电离层组合伪距观测值;表示bds卫星消电离层组合伪距观测值;表示leo卫星消电离层组合伪距观测值;表示gps卫星消电离层组合双频载波相位观测值;表示bds卫星消电离层组合双频载波相位观测值;表示leo卫星消电离层组合伪双频载波相位观测值;表示gps卫星的卫地距初值;表示bds卫星的卫地距初值;表示leo卫星的卫地距初值;卫地距的近似值由卫星坐标和测站伪距定位的坐标计算得到;c表示光速;为吸收了gps卫星接收机端消电离层伪距硬件延迟的接收机钟差;为吸收了bds卫星接收机端消电离层伪距硬件延迟的接收机钟差;为吸收了leo卫星接收机端消电离层伪距硬件延迟的接收机钟差;t表示对流层误差;isb表示包含了系统之间的时间差和不同系统之间伪距硬件延迟之差的系统间偏差;表示gps和bds的系统间偏差;表示gps和leo的系统间偏差;λ
g
表示gps卫星无电离层组合波长;λ
c
表示bds卫星无电离层组合波长;λ
l
表示leo卫星无电离层组合波长;为gps卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层
组合模糊度参数;为bds卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层组合模糊度参数;为leo卫星吸收了包含伪距和双频载波相位观测值硬件延迟的消电离层组合模糊度参数;to为不同系统之间钟差基准约束固有的时间差异;to
c,g
表示bds卫星与gps卫星之间钟差基准约束固有的时间差异;to
l,g
表示leo卫星与gps卫星之间钟差基准约束固有的时间差异;表示gps卫星消电离层组合接收机端的伪距硬件延迟,表示bds卫星消电离层组合接收机端的伪距硬件延迟,表示leo卫星消电离层组合接收机端的伪距硬件延迟;e为其他误差之和,可以采用模型进行修正;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;为的其他误差之和;所述其他误差包括潮汐、地球自转、相对论、相位缠绕、天线相位偏差和多路径误差;表示gps的消电离层组合伪距观测噪声,表示bds的消电离层组合伪距观测噪声,表示leo的消电离层组合伪距观测噪声,表示gps的消电离层组合相位观测噪声,表示bds的消电离层组合相位观测噪声,表示leo的消电离层组合相位观测噪声;x=[x,y,z]表示初始定位数据(伪距定位坐标)的改正数。
[0081]
随机模型采用如步骤102中的高度角定权模型。
[0082]
3)采用递归最小二乘法对所述低轨增强gnss精密单点定位模型求解,得到所述定位结果。具体为:
[0083]
首先,根据上述低轨增强gnss精密单点定位模型建立线性化后的观测方程,利用递归最小二乘进行未知参数的求解,未知参数为:
[0084][0085]
然后,将初始定位数据(伪距定位坐标)和初始定位数据的改正数[x,y,z]之和作为定位结果输出到文件中。
[0086]
作为一种可选的实施方式,在步骤101之后,还包括:
[0087]
对所述观测数据和所述产品数据的完整性进行质量检查;对质量检查后的双频载波相位观测值进行周跳探测,并对存在周跳的数据进行标记,得到预处理后的数据。
[0088]
在实际应用中,对观测数据、轨道数据、钟差数据进行质量检查,尤其是数据完整性方面的检查,并对相位观测数据进行周跳探测,对周跳结果进行标记。
[0089]
本实施例通过低轨增强gnss伪距单点定位求解出具有一定精度的三维坐标值,再将上述三维坐标值当作低轨增强gnss精密单点定位的初值,建立legnss ppp模型并求解测站的三维坐标和其他未知参数,从而得到定位结果。该leo与gnss融合精密单点定位方法,具有如下优点:
[0090]
第一,低轨卫星导航信号强,抗干扰性好。
[0091]
低轨卫星播发信号的强度大约比gnss信号强30db,这意味其抗干扰性和稳定性更
强,有利于改善遮蔽环境下的定位性能。
[0092]
第二,低轨卫星运行速度快,可以提高收敛时间性能。
[0093]
低轨道卫星运行速度快,可以在几分钟内通过测站上空,有助于卫星几何构型的快速变化,可以有效地抑制多径效应,缩短精密定位的收敛时间,通过leo和gnss联合定位,能提高ppp定位的性能。
[0094]
第三,简单可靠,应用方便。
[0095]
本发明实施例只需在多gnss联合定位的基础上加入leo卫星数据,仅仅采用简单的精密单点定位流程即可完成快速精密定位,实施方便。
[0096]
在实际应用中,上述leo与gnss融合精密单点定位方法的一个具体实现过程如下:
[0097]
参见图2,本实例包括数据获取、数据预处理、低轨增强gnss伪距单点定位、误差修正、低轨增强gnss精密单点定位函数模型建立、未知参数求解和结果输出七个部分。
[0098]
第一步,数据获取。获取测站观测到的伪距观测值和双频载波观测值,以及ppp数据处理需要的产品数据(精密星历、精密钟差、天线文件数据、地球自转参数、硬件延迟参数等),该产品数据包括精密产品数据和辅助产品数据。
[0099]
第二步,数据预处理。对原始观测数据、轨道数据、钟差数据进行质量检查,尤其是数据完整性方面的检查,对相位观测值数据进行周跳探测,对周跳结果进行标记并作降权处理。
[0100]
第三步,低轨增强gnss伪距单点定位。基于伪距观测值,进行伪距单点定位,为精密单点定位可以提供满足一定精度的定位初值,并计算高度角和方位角,方便后续解算。
[0101]
第四步,误差修正。对经过预处理后的数据进行卫星相关、传播路径相关、接收机相关的误差进行修正,对经过预处理后的数据进行卫星相关、传播路径相关、接收机相关的误差进行修正。
[0102]
第五步,低轨增强gnss精密单点定位函数模型建立。首先对仿真的原始双频相位观测值分别进行无电离层组合,形成无电离层组合观测值;同时基于精密产品建立函数模型,并依据卫星高度角确定随机模型。
[0103]
第六步,未知参数求解。根据上述模型建立线性化后的观测方程,利用递归最小二乘进行未知参数的求解,包括测站三维坐标和其他未知参数。
[0104]
第七步,结果输出。将定位结果输出到文件中。
[0105]
本发明还提供了一种leo与gnss融合精密单点定位系统,参见图3,本实施例的系统,包括:
[0106]
数据获取模块201,用于获取观测数据和产品数据;所述观测数据包括leo卫星伪距观测值、leo卫星双频载波相位观测值、gnss卫星伪距观测值和gnss卫星双频载波相位观测值;所述产品数据包括精密星历、精密钟差、天线文件数据、地球自转参数和硬件延迟参数。
[0107]
伪距单点定位模块202,用于基于所述观测数据进行伪距单点定位,得到初始定位数据;所述初始定位数据包括测站三维坐标初值、卫星高度角和卫星方位角。
[0108]
误差修正模块203,用于对所述产品数据进行误差修正,得到修正数据。
[0109]
精密单点定位模块204,用于基于所述观测数据、所述初始定位数据和所述修正数据进行精密单点定位,得到定位结果。
[0110]
作为一种可选的实施方式,所述伪距单点定位模块202,具体包括:
[0111]
第一模型构建单元,用于基于所述观测数据建立低轨增强gnss伪距单点定位函数模型;所述低轨增强gnss伪距单点定位函数模型包括伪距单点定位观测方程和高度角定权模型。
[0112]
第一求解单元,用于对所述低轨增强gnss伪距单点定位函数模型求解,得到所述初始定位数据。
[0113]
作为一种可选的实施方式,所述精密单点定位模块204,具体包括:
[0114]
处理单元,用于对所述观测数据进行无电离层组合,得到无电离层组合观测值。
[0115]
第二模型构建单元,用于基于所述无电离层组合观测值、所述初始定位数据和所述修正数据建立低轨增强gnss精密单点定位模型;所述低轨增强gnss精密单点定位模型包括精密单点定位观测方程和高度角定权模型。
[0116]
第二求解单元,用于采用递归最小二乘法对所述低轨增强gnss精密单点定位模型求解,得到所述定位结果。
[0117]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0118]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1