一种旋转式道路监测雷达的制作方法
1.本发明涉及交通设备技术领域,尤其涉及一种旋转式道路监测雷达。
背景技术:
2.道路监测雷达又称测速雷达,雷达测速主要是利用多普勒效应原理:当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机频率。如此即可借由频率的改变数值,计算出目标与雷达的相对速度。测速雷达利用电磁波探测目标的电子设备。由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。
3.现在高速公路上使用的测速雷达主要分为两种,一种是固定式测速雷达,另外一种是流动性测速雷达。而固定式测速雷达又分为多目标测速雷达和单目标测速雷达,多目标测速雷达通常安装在道路旁边的绿化带里面,用于对多个车道同时进行车辆超速检测,而单目标测速雷达通常安装在龙门架上,用于对固定的车道进行车辆超速监测。
4.由于多目标测速雷达存在被大货车遮挡的问题,通常安装在高速公路的中间绿化带中,以避免行驶在慢车道上的大货车对目标的遮挡。国内的高速公路通常存在这样的情况,节假日时,常常会出现单方向的车道拥堵,另一个方向的车道内几乎没有车辆的情况,而多目标测速雷达监测拥堵车道上的车辆速度就丧失了测速的意义,而现有的多目标测速雷达的监测方向都是固定的,无法根据实际的道路情况进行旋转,不能在监测方向的道路出现拥堵时远程调节监测方向,对反方向的道路进行车辆速度监测。
5.为此,我们提出一种旋转式道路监测雷达来解决上述问题。
技术实现要素:
6.本发明提供一种旋转式道路监测雷达,解决了背景技术中提出的技术问题。
7.为解决上述技术问题,本发明提供的一种旋转式道路监测雷达,包括底座和设置在底座顶部的测速雷达本体,所述底座的顶部固定设置有控制装置,所述底座的顶部设置有可移动的支撑柱,所述支撑柱的顶部通过转轴连接支撑板,所述测速雷达本体固定设置在支撑板的顶部,所述支撑柱的侧壁固定连接有固定板,所述固定板的顶部固定连接有驱动电机b,所述控制装置与驱动电机b和测速雷达本体之间电连接,所述驱动电机b的输出轴通过调节装置与支撑板的底部连接;
8.所述调节装置包括固定连接在驱动电机b输出轴的齿轮,所述支撑板的底部固定连接有呈环形设置的齿条,所述齿轮与齿条啮合。
9.优选的,所述控制装置包括控制箱,所述控制箱内设置有控制器、稳压器、ups电源和通讯模块。
10.优选的,所述底座的顶部设置有多个固定孔,以便于将所述底座固定在混凝土墩上。
11.优选的,所述底座的顶部固定连接有固定轨道,所述固定轨道上滑动连接有呈t型
设置的移动块,所述固定轨道上设置有与移动块对应的滑动槽a,所述支撑柱的底部与移动块的顶部固定连接。
12.优选的,所述固定轨道的顶部固定连接有驱动电机a,所述驱动电机a与控制装置之间电连接,所述驱动电机a的输出轴通过联动装置连接有转动杆,所述固定轨道上设置有与联动装置对应的活动空腔,所述转动杆转动连接在滑动槽a的内侧壁上,所述转动杆上设置有外螺纹,所述移动块螺纹套接在转动杆的外侧壁上。
13.优选的,所述联动装置包括固定套接在转动杆外侧壁上和固定连接在驱动电机a输出轴上的锥齿轮,两个所述锥齿轮啮合。
14.优选的,所述固定轨道上滑动连接有两个滑块,所述固定轨道上设置有与两个滑块对应的滑动槽b,所述支撑柱的顶部固定套接有固定块,所述移动块的顶部和滑块的顶部均通过l型设置的支撑杆与固定块连接。
15.优选的,两个所述滑动槽b以滑动槽a为中心对称设置。
16.优选的,所述支撑柱的外侧壁转动套接有套环,所述套环的外侧壁通过多个l型设置的连接杆与支撑板的底部连接。
17.与相关技术相比较,本发明提供的一种旋转式道路监测雷达具有如下有益效果:
18.1、本发明提供一种旋转式道路监测雷达,通过底座的顶部安装支撑柱,支撑柱的顶部安装可转动的支撑板,将测速雷达本体固定设置在支撑板的顶部,利用安装在支撑柱侧壁上的驱动电机b带动支撑板转动,完成对测速雷达本体测速方向进行调节的功能,解决了现有的多目标测速雷达的监测方向都是固定的,无法根据实际的道路情况进行旋转,不能在监测方向的道路出现拥堵时远程调节监测方向,对反方向的道路进行车辆速度监测的技术问题。
19.2、本发明提供一种旋转式道路监测雷达,通过在底座的顶部设置固定轨道,支撑柱的底部通过移动块安装在固定轨道上,利用驱动电机a转动带动转动杆转动达到对移动块进行位置调节的效果,实现了对支撑柱在支撑板顶部的位置进行调节的功能,以便于根据实际测速需要对测速雷达本体的位置进行的功能,降低了该旋转式道路监测雷达的使用局限性。
附图说明
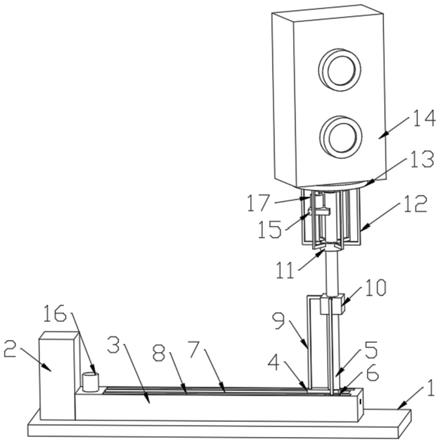
20.图1为一种旋转式道路监测雷达的结构示意图;
21.图2为一种旋转式道路监测雷达的俯视图;
22.图3为一种旋转式道路监测雷达的仰视图;
23.图4为图3中a处的结构示意图;
24.图5为一种旋转式道路监测雷达的剖视图;
25.图6为图5中b处的结构示意图。
26.图中标号:1、底座;2、控制装置;3、固定轨道;4、移动块;5、支撑柱;6、滑块;7、滑动槽a;8、滑动槽b;9、支撑杆;10、固定块;11、套环;12、连接杆;13、支撑板;14、测速雷达本体;15、固定板;16、驱动电机a;17、驱动电机b;18、齿轮;19、齿条;20、转轴;21、锥齿轮;22、转动杆。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.实施例一
29.由图1
‑
图6给出,一种旋转式道路监测雷达,包括底座1和设置在底座1顶部的测速雷达本体14,底座1的顶部固定设置有控制装置2,底座1的顶部设置有可移动的支撑柱5,支撑柱5的顶部通过转轴20连接支撑板13,测速雷达本体14固定设置在支撑板13的顶部,支撑柱5的侧壁固定连接有固定板15,固定板15的顶部固定连接有驱动电机b17,控制装置2与驱动电机b17和测速雷达本体14之间电连接,驱动电机b17的输出轴通过调节装置与支撑板13的底部连接。
30.底座1的顶部设置有多个固定孔,需要说明的是,图中未画出,目的是以便于将底座1固定在混凝土墩上。
31.支撑柱5的顶部通过转轴20与支撑板13连接,目的是便于安装在支撑板13顶部的测速雷达本体14可以在支撑柱5的顶部进行转动,以便于对测速雷达本体14的测速方向进行调节,解决了现有的多目标测速雷达的监测方向都是固定的,无法根据实际的道路情况进行旋转,不能在监测方向的道路出现拥堵时远程调节监测方向,对反方向的道路进行车辆速度监测的技术问题。
32.调节装置包括固定连接在驱动电机b17输出轴的齿轮18,支撑板13的底部固定连接有呈环形设置的齿条19,齿轮18与齿条19啮合。
33.通过驱动电机b17带动齿轮18转动,由于齿轮18与安装在支撑板13底部的齿条19啮合,且支撑板13通过转轴20与支撑柱5的顶部连接,因此,驱动电机b17带动支撑板13进行转动调节,可以达到对测速雷达本体14的监测方向进行调节,以便于当原来监测的道路发生拥堵时,转动到反方向的道路上进行测速监测,同时还可以对测速雷达本体14的监测方向进行限位。
34.支撑柱5的外侧壁转动套接有套环11,套环11的外侧壁通过多个l型设置的连接杆12与支撑板13的底部连接。
35.套环11和连接杆12的作用是提高支撑柱5与支撑板13连接的稳定性。
36.实施例二
37.在实施例一的基础上,底座1的顶部固定连接有固定轨道3,固定轨道3上滑动连接有呈t型设置的移动块4,固定轨道3上设置有与移动块4对应的滑动槽a7,支撑柱5的底部与移动块4的顶部固定连接。
38.移动块4的作用是便于对支撑柱5在底座1上的位置进行调节,目的是根据需要调节测速雷达本体14在底座1上的位置和监测方向。
39.固定轨道3的顶部固定连接有驱动电机a16,驱动电机a16与控制装置2之间电连接,驱动电机a16的输出轴通过联动装置连接有转动杆22,固定轨道3上设置有与联动装置对应的活动空腔,转动杆22转动连接在滑动槽a7的内侧壁上,转动杆22上设置有外螺纹,移动块4螺纹套接在转动杆22的外侧壁上。
40.通过远程控制驱动电机a16转动可以调节移动块4在固定轨道3上移动,达到远程调节测速雷达本体14在底座1上的位置。
41.联动装置包括固定套接在转动杆22外侧壁上和固定连接在驱动电机a16输出轴上的锥齿轮21,两个锥齿轮21啮合。
42.联动装置的作用是便于驱动电机a16转动带动转动杆22转动,达到对移动块4位置进行调节的效果。
43.固定轨道3上滑动连接有两个滑块6,固定轨道3上设置有与两个滑块6对应的滑动槽b8,支撑柱5的顶部固定套接有固定块10,移动块4的顶部和滑块6的顶部均通过l型设置的支撑杆9与固定块10连接。
44.两个滑块6的作用是便于提高支撑柱5固定在移动块4顶部的稳定性。
45.两个滑动槽b8以滑动槽a7为中心对称设置。
46.工作原理:
47.当测速雷达本体14监测方向的道路交通拥堵时,相关工作人员远程将控制指令发生给控制装置2,控制装置2根据指令控制驱动电机b17转动,驱动电机b17转动带动齿轮18转动,由于齿轮18与安装在支撑板13底部的齿条19啮合,且支撑板13通过转轴20与支撑柱5的顶部连接,因此,驱动电机b17带动支撑板13进行转动调节,可以达到对测速雷达本体14的监测方向进行调节,以便于当原来监测的道路发生拥堵时,转动到反方向的道路上进行测速监测,同时还可以对测速雷达本体14的监测方向进行限位,如果测速雷达本体14被绿化带的树木遮挡住时(因为测速雷达本体14上自带摄像头,工作人员可以远程查看监测视线内是否被树木遮挡),工作人员可以远程将指令发生给控制装置2,控制装置2根据指令控制驱动电机a16转动,驱动电机a16转动带动转动杆22转动,由于移动块4螺纹套接在转动杆22的外侧壁上,因此,驱动电机a16转动可以调节测速雷达本体14在底座1上移动,避免障碍物遮挡测速雷达本体14的拍摄镜头。当原来监测的道路畅通时,工作人员可以远程控制测速雷达本体14的监测方向和位置进行复位。
48.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
49.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1