适应不同云底高度的双视场多波长拉曼激光雷达分光系统
1.本发明涉及大气探测技术领域,特别是一种适应不同云底高度的双视场多波长拉曼激光雷达分光系统。
背景技术:
2.气溶胶
‑
云相互作用(aerosol
‑
cloud interaction,aci)是地球系统中不确定性最高的辐射强迫因子之一,该相互作用也是气溶胶对地球
‑
大气系统的辐射收支平衡进行影响的两大主要方式之一。在气溶胶
‑
云相互作用中,气溶胶通过影响云的光学特性、云量、含水量以及寿命等参数,进而对气候产生包括第一类间接效应(twomey效应)和第二类间接效应(albercht效应或云生命周期效应)的间接影响;与此同时,气溶胶对云的影响还包括半直接效应。因此气溶胶和云的相互作用对于大气构成以及全球气候变化有着极其重要的影响,研究气溶胶
‑
云相互作用,对大气辐射收支平衡和气候变化的影响以及作用机理具有重要的科学意义和研究价值。
3.当前学者们利用卫星、机载、地基观测和数值模式等手段对气溶胶和云微物理特性展开了相关研究。机载现场观测技术测量准确但成本太高,仅限于个案研究,并不适合进行具有统计学意义的长时间观测。卫星被动遥感测量可以覆盖全球范围,因此可以进行大范围长时间的观测,但时效性较差。激光雷达技术作为一种主动的遥感探测技术,近年来常用于大气、环境、气象、海洋等领域。相比较而言,包括激光雷达在内的主动遥感技术可以进行具有高时空分辨率的长期观测,因此可以更为深入的研究气溶胶
‑
云相互作用。利用主动遥感对云和气溶胶特性进行长时间观测,雷达和激光雷达技术都具有可行性。相比较于激光雷达,雷达的穿透深度更广,对于测量大范围内的垂直云层具有重要意义;但对于薄云层、水云的探测却并不合适,这是因为探测信号低于雷达探测阈值。相比较而言,激光雷达更适合作为水云、气溶胶的探测工具。激光雷达能够以很高的时空分辨率探测气溶胶、云特性垂直分布,因此激光雷达成为研究气溶胶、云特性的重要手段。对于在大气环境中占主要成分的较小液滴,激光雷达具有更高的灵敏度,也正是因此,它可以对液滴形成和气溶胶粒子混合的云底区域进行高精度的探测。
4.综上,利用激光雷达对气溶胶
‑
云的相互作用进行探测研究具有很好的应用前景与可实现性。然而,目前国内还没有相应的系统,国外对水云探测的激光雷达系统结构复杂,需要多种仪器设备相互配合使用,操作繁琐,不适于推广应用。
技术实现要素:
5.本发明的目的在于,提供一种适应不同云底高度的双视场多波长拉曼激光雷达分光系统,应用于激光雷达系统中进行水云探测,以简化激光雷达系统的结构。
6.为了实现上述发明目的,本发明实施例提供了以下技术方案:
7.本发明实施例提供了一种适应不同云底高度的双视场多波长拉曼激光雷达分光系统,包括双视场装置、大视场光路系统和小视场光路系统,所述双视场装置包括至少两个
不同尺寸的双视场分光器件,以适应不同云底高度的大气探测;其中,
8.所述双视场分光器件用于使经大气层反射后的回波信号中,一部分进入大视场光路系统,一部分进入小视场光路系统;
9.所述大视场光路系统和小视场光路系统均用于在对应视场下筛选出不同波长的光信号。
10.上述方案中,利用双视场装置,使不同角度散射光分别进入了不同视场,实现了不同散射角度的分光,而且大/小视场光路系统可以筛选出不同波长的光信号,实现了不同波长的筛选。整个系统不仅可以实现多波长双视场分光,而且系统结构简单,当其应用于激光雷达系统时,可以简化整个激光雷达系统的结构。另外,通过设置至少两个不同尺寸的双视场分光器件,可以实现在不改变光路系统的情况下满足不同云底高度的大气探测需求,进一步使得整个系统的结构更加简化,操作也更加简单。即是说,可以解决如何在不改变光路的情况下探测不同高度的水云的技术问题。
11.在本发明方案中,所述双视场分光器件包括大视场部分和小视场部分,各个双视场分光器件的大视场部分和小视场部分的尺寸均不同。
12.上述方案中,各个双视场分光器件的大视场部分和小视场部分的尺寸均不同,可以更好地适应不同云底高度的水探测。
13.在一个可实施方案中,所述小视场部分用于透射回波信号中的小角度散射光,大视场部分用于反射回波信号中的大角度散射光。
14.上述方案中,分别通过透射和反射的方式来区分小视场和大视场的光信号,实施方式简单,可以降低系统的复杂度。
15.在一个可实施方案中,所述双视场装置还包括载体,所述至少两个双视场分光器件布置于所述载体上,通过移动所述载体实现不同尺寸的双视场分光器件的选用。
16.上述方案中,通过移动所述载体实现不同尺寸的双视场分光器件的选用的方式,相比于更换(也就是将原有双视场分光器件拆下,并装上其他尺寸的双视场分光器件)双视场分光器件的方式,操作更加简单、方便,同时借助于载体还实现了双视场分光器件的安装固定。
17.在一个可实施方案中,所述载体为转盘,所述至少两个双视场分光器件沿转盘的圆周布置。所述载体为矩形带,所述至少两个双视场分光器件沿矩形带的长度方向呈单行布置。
18.当载体为转盘时,转动转盘即可选择不同尺寸的双视场分光器件;当载体为矩形带时,通过拖动矩形带即可选择不同尺寸的双视场分光器件,实现方式简单,方便操作。
19.在一个可实施方案中,大视场光路系统与小视场光路系统的结构相同,均包括若干个二向色镜、滤波镜组和光电倍增管,滤波镜组与光电倍增管一一对应;当二向色镜为多个时,不同的二向色镜镀有针对不同波长光信号的反射膜,且多个二向色镜沿光路依次布置,光路前方的二向色镜透射的光信号输入至光路后方的二向色镜,光路末端的二向色镜透射的光信号入射至对应的滤波镜组,二向色镜反射的光信号入射至对应的滤波镜组,经滤波镜组滤波后被对应的光电倍增管吸收。
20.与现有技术相比,本发明分光系统,整个系统不仅可以实现多波长双视场分光,而且系统结构简单,当其应用于激光雷达系统时,可以简化整个激光雷达系统的结构。
21.本发明所具有的其他优势将会在具体实施例中进行相应说明。
附图说明
22.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
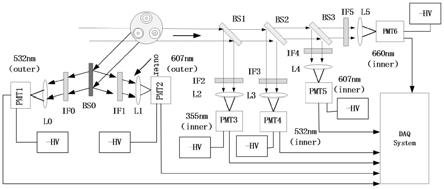
23.图1为实施例中举例的适应不同云底高度的双视场多波长拉曼激光雷达分光系统的光路图。
24.图2为实施例中双视场装置的一种结构示意图。
25.图3为实施例中双视场装置的另一种结构示意图。
26.图4为实施例中激光雷达系统的光路图。
27.图5是实测水云消光系数与高度图。
28.图6是实测水云有效粒子半径与液态水含量图。
具体实施方式
29.下面将结合本发明实施例中附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.本实施例中提供了一种适应不同云底高度的双视场多波长拉曼激光雷达分光系统,包括双视场装置、大视场光路系统和小视场光路系统。其中,双视场装置主要用于使经大气层反射后的回波信号中,一部分进入大视场光路系统,一部分进入小视场光路系统;大视场光路系统和小视场光路系统均用于在对应视场下筛选出不同波长的光信号。
31.可以参考图2和图3,本实施例中,双视场装置包括载体和3个双视场分光器件,3个双视场分光器件布置于载体上。图2所示结构中,载体为转盘,3个双视场分光器件沿转盘的圆周布置。图3所示结构中,载体为矩形带,3个双视场分光器件沿矩形带的长度方向呈单行布置。
32.双视场分光器件包括大视场部分和小视场部分,小视场部分用于透射回波信号中的小角度散射光,大视场部分用于反射回波信号中的大角度散射光。当双视场分光器件为两个或以上时,各个双视场分光器件的大视场部分和小视场部分的尺寸均不同。例如图2和图3所示的结构中,3个双视场分光器件的大视场部分的尺寸不同,3个双视场分光器件的小视场部分的尺寸也不同。
33.作为一种实施方式,双视场分光器件为一个中心带透光孔的镜片,透光孔为所述小视场部分,所述镜片镀有环形(不一定是圆环形,也可以是椭圆环或者方形环)反射膜,该反射膜区域为所述大视场部分,大视场部分在小视场部分的外围。针对于圆形透光孔和圆环形反射膜的情况,双视场器分光件的小视场部分的尺寸即是指透光孔的直径(或半径),
大视场部分的尺寸即是指反射膜的内环和外环的直径(或半径)。
34.本实施中,采用一个载体上布置多个双视场分光器件的目的是可以根据不同需要选择使用不同尺寸的双视场分光器件,以实现在不改变光路的情况下也能够实现对不同高度的水云探测,既增强系统的适用性,同时也降低系统的复杂度,因为相比于改变光路而言,转动或拖动载体以实现采用不同尺寸的双视场分光器件的方式可以使得系统更加简化,操作也更加简便、高效。
35.容易理解的是,在其他实施方案中,双视场分光器件也可以不需要载体,通过可拆卸连接方式安装双视场分光器件,继而实现不同尺寸的双视场分光器件更换。也容易理解的是,基于不同的实现方式,载体的结构可以采用其他方式,并不限于图2和图3所示的结构,载体中布置的双视场分光器件的个数也没有限定。
36.直径较大的颗粒发生散射将会使得前向散射角度变小,直径较小的颗粒发生散射则会导致更大的前向散射角度。根据粒子尺寸与产生散射角度的这一关系,经大气层反射回来的回波信号的散射光可以分为大角度散射光与小角度散射光两部分;其中大角度散射光进入大视场光路系统,小角度散射光则进入小视场光路系统,其余不属于散射光的干扰光束则在大视场与双视场分光器件的部分被完全遮挡。容易理解的是,本文中所述的大角度散射光和小角度散射光,或者大视场光路系统和小视场光路系统中的大和小只是相对概念,没有绝对的角度限制。
37.可以参阅图1,小视场光路系统包括若干个二向色镜(bs)、若干个滤波镜组(if+l)和若干个光电倍增管(pmt),滤波镜组、光电倍增管一一对应,也就是一个二向色镜对应一个滤波镜组一个滤波镜组对应一个光电倍增管,每个光电倍增管由一个负高压电源(
‑
hv)供电。二向色镜的数量比滤波镜组的数量少一个,滤波镜组的数量由光的波长数量决定,一个波长的光对应一个滤波镜组。本实施例中,一个滤波镜组包括一个滤波镜和一个透镜,透镜安装于滤波镜的光路后方。
38.图1所示的结构中,二向色镜为3个,分别为bs1、bs2、bs3,且沿光路依次布置,每个二向色镜分别镀有针对不同波长光具有高反射率的反射膜,以将不同波长的光反射出去。例如,从透光孔透出的小角度散射光先入射至bs1,bs1将波长为355nm的光反射至对应的一个滤波镜组(if2+l2),经滤波镜组滤波后由对应的光电倍增管(pmt3)吸收。其他波长的光信号则从bs1中透射出去,入射至bs2,bs2对波长为532nm的光信号进行反射,对其他波长的光信号进行透射,入射至bs3,bs3对波长为607nm的光信号进行反射,对其他波长的光信号进行透射,660nm的光信号经bs3透射后进入对应的滤波镜组(if5+l5)。
39.大视场光路系统的结构与小视场光路系统的结构类似,也是包括二向色镜(bs)、滤波镜组(if+l)和光电倍增管(pmt),且滤波镜组、光电倍增管一一对应,每个光电倍增管由一个负高压电源(
‑
hv)供电。图1所示结构中,二向色镜为一个,镀制有针对607nm波长的光信号具有高反射率的反射膜,607nm波长的光信号被bs0反射后,进入对应的一个滤波镜组(if1+l1),经滤波镜组滤波后由对应的光电倍增管(pmt2)吸收,光电倍增管再将吸收的光信号传输至数据采集系统,由数据采集系统转换为电信号。532nm波长的光信号被bs0透射后,进入对应的一个滤波镜组(if0+l0),经滤波镜组滤波后由对应的光电倍增管(pmt1)吸收。
40.可以参阅图4,将图1所示的分光系统应用于激光雷达系统中进行大气探测。激光
雷达系统中还包括激光器(nd:yag laser)、望远镜(telescope)和数据采集系统(daq system)。
41.其中,激光器用于向大气层发射激光束。在系统布置时,激光器发射的激光束可以直接入射至大气层;如图4所示,也可以是经过反射镜反射后入射至大气层。
42.其中,望远镜用于接收大气层中的回波信号。激光信号发射至大气层后,经大气层反射,形成回波信号,利用望远镜即可接收。在实验中,望远镜采用的是卡塞格林望远镜。根据布局需要,望远镜输出的回波信号可以直接入射至双视场分光器件;如图4所示,也可以经过全反镜(m1)反射后再入射至双视场分光器件。在系统中,如果望远镜的输出端与双视场分光器件的输入端呈90度布置,那么优选全反镜呈45度角设置,这样可以使得经全反镜反射后的回波信号可以平行入射至双视场分光器件。
43.其中,大角度散射光和小角度散射光分别经过大视场光路系统、小视场光路系统处理后,进入数据采集系统,由数据采集系统转换为可用于反演的电信号。
44.视场角度的选择通常使接收到的散射贡献最大,因此双视场的视场角选择也基于这一观点。位于银川市的北方民族大学光学观测基地的硬件条件如下:激光束散度γs=0.15mrad,卡塞格林望远镜接收孔径dr=406.4mm,激光束直径ds=9mm。定义双视场的视场角分别为小视场角γin和大视场角γout;双视场的视场角大小由云底高度h、对云的探测深度z、望远镜接收孔径dr以及激光束直径ds共同决定。
45.其中,dr/h可以近似认为是消光测量的最佳视场角估计值,对于大视场视场角γout有:γ_out=0.01z/h。
46.适配北方民族大学激光雷达探测系统,本文拟定双视场分光器件的参数如下表所示:
[0047][0048][0049]
上表中的小视场是指透光孔的散射角度,大视场是指镜片上反射膜区域的散射角度,mrad是毫弧度是角度单位,与度可以互相换算,一般用在表征镜片可以接受光的范围。上表中的大视场直径是指从镜片中心到镀有反射膜部分的直径,小视场直径是指透光孔的直径。
[0050]
采用双视场分光器件测量过程中,通过在光路中搭载不同尺寸的双视场分光器件来实现对大视场和小视场尺寸的控制,进而控制大视场角和小视场角进行相应的变化;通过这样的方式可以适配不同云底高度的水云测量过程,从而获得更多更全面的测量数据信息。
[0051]
对于水云的探测,激光雷达回波信号主要取决于云的探测深度与视场角的大小,对于云的探测深度z一般由光速c、光子到达探测点的时间t与云底高度h决定。
[0052]
对于氮气拉曼散射过程,氮气振动拉曼回波信号的激光雷达方程有:
[0053][0054]
式中q为多波长激光雷达探测系统的绝对校准常数,pn(z)为氮气振动拉曼后向散射信号,β
n
为氮气分子振动拉曼后向散射系数,β
n
等于氮气分子数密度与其拉曼后向散射截面的乘积。α代表消光系数,λ代表激光波长,λ0是激光发射波长,λ
n
是氮气分子散射波长。
[0055]
大气中水云和雾可以利用云函数的推广加以描述,这一模型可以很好地体现低空中云的一些分布特点,云体积浓度分布函数如下:
[0056]
n(r)=2.373r6e
‑
1.5r
cm
‑3μ
‑1其中n(r)为半径r处的体积浓度,由这一云模型可以得出,对于低空水云,云粒子体积浓度在3μm
‑
6μm左右达到峰值,这为下文水云粒子有效半径的反演提供了理论基础。
[0057]
对于云底高度为1.5km
‑
5km的水云,散射过程必须考虑多重散射对回波信号的影响,为了便于研究其性质,本文采用luc r.bissonnette等人提出的一种多重散射模型对水云有效粒子半径进行反演,多重散射激光雷达回波方程如下:
[0058]
p(z,θ)=p
ss
(z)m(z,θ)
[0059]
其中p(z,θ)为接收到的多重散射激光雷达回波功率,p
ss
(z)是单次散射激光雷达方程,m(z,θ)为多重散射校正因子,可以被分为f
d
(衍射分量部分)和f
g
(涉及至少一个几何光学散射的所有其他散射)。
[0060]
对于可见光和近红外波长的云粒子,在多视场测量中使用最大视场返回信号和最小视场返回信号对水云光学厚度进行计算,根据bissonnette et al.的研究有:
[0061][0062]
其中δ
d
是相对的多次到单次散射后向散射系数,在可见光与近红外波长水云中通常等于0.7,τ(z)代表着光学厚度,可以与多视场激光雷达回波信号方程p(z,θ)相关联,其中θ
max
和θ
min
分别是最大视场和最小视场测量的回波信号。
[0063]
根据luc r.bissonnette等人的研究,定义拟合参数θ
md
、比例常数k、相关函数f(z),则对于水云的有效粒子直径d
e
有以下计算公式:
[0064][0065]
其中z为探测高度,z
j
为两种散射介质之间的边界高度,例如大气与水云之间的边界高度,λ为激光雷达波长。有关拟合参数θ
md
、比例常数k、相关函数f(z)的确定与取值可以参考luc r.bissonnette et al.的研究。
[0066]
对于水云来说,液态水含量(lwc)是另外一个重要的微物理特性,对于液态水含量ωl有:
[0067]
[0068]
式中ρ=1g/cm^3为液态水密度,re为有效液滴半径,对于水云测量过程来说即为水云粒子有效半径;根据c.jimenez等人的研究,对于液态水含量的计算,云消光可以由消光效率因子qext(x,m)进行近似计算。而消光效率因子qext(x,m)取决于粒子尺度参数x与云粒子相对于周围介质的复折射率m,复折射率m对于水云测量过程近似取1.33;在实际测量中云粒子有效半径远大于激光波长,因此近似的qext≈2。代入云粒子尺寸分布n(r),液态水含量ωl有以下表达式
[0069][0070]
基于上述公式,根据实际测量的多波长双视场激光雷达数据,可以展开对水云以及气溶胶的大气参数的反演,大气参数包括消光系数、后向散射系数、光学厚度、水云有效粒子半径、液态水含量等。
[0071]
利用图4所示的激光雷达系统,可以测量出双视场对应高度的激光雷达回波信号与时间,根据这些测量结果可以对上述参量进行反演。如图5和图6所示,分别为是由实际测量数据通过反演得出的水云消光系数与高度图,水云有效粒子半径与液态水含量图。
[0072]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1