一种车辆中心线的标定方法和系统与流程
1.本发明涉及汽车检测技术领域,具体涉及一种车辆中心线的标定方法和系统。
背景技术:
2.乘用车在进行试验,需要对静止水平停放的车身中心线y0进行标定,于车顶上方的中心线y0取两点,两点距离0.98m,根据标准0.98米的两点放置gps装置,在实际操作过程中出现测量误差过大的问题,主要体现在车身只有一个固定硬点标定时,由于车身是曲面的,卷尺断面也是曲面的,在测量中卷尺的弹性变形及车身曲面过大都会产生误差;对于整车长度的车身硬点利用卷尺或者激光测距仪都无法完成高精度中心线y0测量,因为车辆驾驶室遮挡住车身前后的硬点。此外配合测量过程中如测量者的身姿随着车辆的高低状态而不断调整身形,观测角度的变化都会产生误差。
技术实现要素:
3.本发明的目的在于克服现有技术的上述不足而提供一种车辆中心线的标定系统,降低人工成本、提高标定效率以及提高标定精度。
4.本发明的目的还在于提供上述提供一种使用上述标定系统对车辆中心线标定的方法。
5.一种车辆中心线的标定系统,包括:车辆基准参考装置,用于通过两点获取车辆的基准中心线y0,所述车辆基准参考装置包括设于待标定车辆前后车牌照框里的前参考装置、后参考装置;前参考装置、后参考装置均包括三轴云台车牌架,装于三轴云台车牌架上端中部的三轴云台,立于三轴云台上的伸缩杆以及金属球,前参考装置、后参考装置的金属球中心连线与车辆的基准中心线y0位于同一竖直平面;车辆姿态检测装置,用于获取待标定车辆的车辆偏移角度,所述待标定车辆位于预设的金属平台上,所述车辆姿态检测装置包括本体支座、装于本体支座上可沿本体支座的x轴、y轴方向滑动的两轴滑台、立于两轴滑台上的电动伸缩杆、装于电动伸缩杆顶端的微调平台;激光扫描测距雷达装于微调平台上,用于测量激光扫描测距雷达至待标定车辆前参考装置、后参考装置之间的水平距离l2、l1;还包括用于根据激光扫描测距雷达测量的数值获得车辆偏移角度的数据处理器;标定装置,所述标定装置包括三轴校准杆、用于测三轴校准杆高度的测高装置、靠尺;还包括根据数据处理器获得的车辆偏移角度进而控制三轴校准杆、激光扫描测距雷达旋转,使三轴校准杆中轴线、激光扫描测距雷达发出的激光线与基准中心线y0相平行,进而测量三轴校准杆中轴线与基准中心线y0之间的垂直距离h5的控制器;靠尺用于在待标定车辆的顶部标定出实际中心线,宽度与测得的距离h5相同。
6.所述三轴云台车牌架包括底板、连接于底板一侧的立板,立板上设有两个用于与
车牌照框内螺栓安装孔对应固定的通过孔;三轴云台上设有两个激光发射器,伸缩杆顶端侧壁经连接杆连接有与两个激光发射器垂直对应的激光接收器;伸缩杆采用碳纤维材质;本体支座上固定有水平仪一和水平仪二,水平仪一沿本体支座x轴方向水平固定在本体支座的侧壁上,水平仪二沿本体支座的y轴方向水平固定在本体支座的另一侧壁上;本体支座上设有三个调平螺栓,三个调平螺栓中的两个位于本体支座一侧的两个边角上,另一个位于相对侧的中心处;两轴滑台包括沿本体支座y轴方向滑动的y轴滑台、设置于y轴滑台上沿本体支座x轴方向滑动的x轴滑台;x轴滑台上也设有两个激光发射器,微调平台上设有与两个激光发射器垂直对应的激光接收器;激光扫描测距雷达为可旋转的360
°
激光扫描测距雷达。
7.所述数据处理器用于根据a=arctan获取所述待标定车辆的车辆偏移角度,a为所述车辆偏移角度,l3为激光扫描测距雷达测到前参考装置、后参考装置水平距离过程中两轴滑台沿y轴方向所移动的行程;控制器的输出端连接有显示屏。
8.所述三轴校准杆包括气泵吸盘、校准杆本体、及用于控制校准杆本体根据激光扫描测距雷达发射来的激光进行自动找正的找正装置;所述找正装置包括角度编码盘、找平装置,所述找平装置设置在角度编码盘的输出轴上,找平装置包括x轴方向找正机构、y轴方向找正机构和z轴方向找正机构,y轴方向找正机构装置在x轴方向找正机构的x轴方向调平杆上,z轴方向找正机构装置在y轴方向找正机构装置的y轴方向调平杆上,z轴方向找正机构的z轴方向调平杆上设有托盘;角度编码盘设置在气泵吸盘上,角度编码盘输出轴轴线与气泵吸盘中心线平齐;气泵吸盘上装有用于检测气泵吸盘上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器一,姿态传感器一与无线通讯模块一连接,用于将姿态传感器一检测信号发送给控制器,经过处理,控制x轴方向找正机构、y轴方向找正机构和z轴方向找正机构根据x、y、z三轴的角度偏值进行自动找正;过渡连接轴竖直立在托盘上,过渡连接轴的顶端与校准杆本体中部垂直连接,校准杆本体为中空管结构,两端部均装有一用于接收激光的光电接收器一,两个光电接收器一的中心轴与校准杆本体中心轴平齐;校准杆本体沿径向并排装有光电接收器二及激光发射器三,光电接收器二位于校准杆本体中心,且与过渡连接轴垂直;测高装置包括立杆、竖直装于立杆上的光栅尺,立杆立于待标定车辆一侧的金属平台上,光栅尺的读数头上装有激光漫反射传感器,激光漫反射传感器接收到激光发射器三发射的激光后,发信号给控制器控制光栅尺的读数头停止移动,并采集当前的高度值。
9.所述托盘上装有用于实时检测托盘上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器二,姿态传感器二与无线通讯模块二连接,用于将姿态传感器二检测信号发送给控制器,控制器将姿态传感器二的检测信号与姿态传感器一的检测信号进行比对后得出角度差值,并控制x轴方向找正机构、y轴方向找正机构和z轴方向找正机构根据角度差值进行差值补偿;x轴方向找正机构包括固定在角度编码盘输出轴上的支撑托盘,x轴方向调平杆通过轴承支撑在支撑托盘两侧壁上,x轴方向调平杆一端穿过支撑托盘的一个侧壁、顶端装有
x轴方向从动齿轮,x轴方向电机的输出轴上装有x轴方向主动齿轮,x轴方向主动齿轮与x轴方向从动齿轮相啮合;y轴方向找正机构包括y轴方向托盘,y轴方向托盘垂直固定在x轴方向调平杆上,y轴方向调平杆通过轴承支撑在y轴方向托盘两侧壁上,y轴方向调平杆一端穿过y轴方向托盘的一个侧壁、顶端装有y轴方向从动齿轮,y轴方向电机的输出轴上装有y轴方向主动齿轮,y轴方向主动齿轮与y轴方向从动齿轮相啮合;z轴方向找正机构包括z轴方向托盘,z轴方向托盘垂直固定在y轴方向调平杆上,z轴方向调平杆通过轴承支撑在z轴方向托盘两侧壁上,z轴方向调平杆一端穿过z轴方向托盘的一个侧壁、顶端装有z轴方向从动齿轮,z轴方向电机的输出轴上装有z轴方向主动齿轮,z轴方向主动齿轮与z轴方向从动齿轮相啮合;支撑托盘、y轴方向托盘、z轴方向托盘上分别装有x轴方向无线信号接收器、y轴方向无线信号接收器、z轴方向无线信号接收器。
10.所述找正装置外部找有防护罩,防护罩上端中部开有让位通孔;所述气泵吸盘两端分别设有一把手,气泵吸盘上设有吸盘进气按钮及吸盘排气阀。
11.一种使用上述技术方案中所述标定系统对车辆中心线标定的方法,包括以下步骤:1)将待标定车辆置于预设的金属平台上;2)标定系统的定位安装;3)车辆偏移角度的测量控制器驱动两轴滑台沿y轴方向移动,同时驱动电动伸缩杆带动上方激光扫描测距雷达进行上下微调,分别测量激光扫描测距雷达至待标定车辆前参考装置、后参考装置之间的水平距离l2、l1;数据处理器根据a=arctan获取所述待标定车辆的车辆偏移角度,a为所述车辆偏移角度,l3为激光扫描测距雷达测到前参考装置及后参考装置水平距离过程中两轴滑台沿y轴方向所移动的行程;4)实际中心线的标定标定校准杆本体的零位;控制器控制激光扫描测距雷达、校准杆本体旋转角度a,使激光扫描测距雷达的激光线、三轴校准杆轴心线与基准中心线y0相平行,再驱动两轴滑台沿y轴方向带动激光扫描测距雷达从前参考装置或后参考装置向校准杆本体处移动,至激光扫描测距雷达发射的激光线与三轴校准杆轴心线再次重合,该过程中两轴滑台沿y轴方向的移动距离记为h5;依据距离h5选取对应尺寸的靠尺,将靠尺靠到三轴校准杆边上,利用平行的原理在待标定车辆车顶部标定出实际中心线,根据试验要求实际中心线上取两点,两点距离0.98m,根据标准0.98米的两点放置gps装置,至此标定工作完成。
12.在步骤4)中,控制器根据测高装置测得的校准杆本体中轴线与地面间的高度,驱动电动伸缩杆带动上方激光扫描测距雷达进行上下微调,至激光扫描测距雷达发射激光与校准杆本体中轴线位于同一平面内;控制器继续驱动两轴滑台沿y轴方向上移动,同时驱动角度编码盘转动使校准杆
本体旋转,直至激光扫描测距雷达发射的激光线与校准杆本体轴心线重合,此时准杆本体位置即为的零位。
13.在步骤1)中,前参考装置、后参考装置安装后,通过三轴云台自动调平伸缩杆基准平面,然后通过三轴云台上的两个激光发射器一向上方发射两个平行的激光束,经过伸缩杆上的两个激光接收器接收激光束,进而对伸缩杆垂直度进行检测;在步骤2)中,将前参考装置、后参考装置分别安装在待标定车辆前后车牌照框里,安装后前参考装置、后参考装置的金属球的中心连线与车辆的基准中心线y0同一竖直平面;将标定装置的三轴校准杆固定在待标定车辆的车顶上;将车辆姿态检测装置放置于待标定车辆前方的金属平台上,放置后保证本体支座在x、y轴方向上与金属平台相平行,后通过水平仪一、水平仪二及三个调平螺栓使本体支座上表面处于水平状态。
14.步骤2)中从本体支座x轴方向的一侧壁取两点进行测量,使两点到金属平台x轴方向侧壁的距离h1、h2相等,然后在y轴方向的一侧壁取两点进行测量,使两点到金属平台y轴方向侧壁的距离h3、h4相等;此时本体支座在x轴方向、y轴方向上与金属平台相平行;本体支座定位后,通过设置在两轴滑台上的两个激光发射器二向上方发射两个平行的激光束,经过设置在微调平台上的两个激光接收器接收激光束,微调平台根据两个激光接收器接收的激光束状态进行微调使激光扫描测距雷达处于水平面。
15.本发明的有益效果是:1.本发明提供一种车辆中心线的标定方法,通过激光扫描测距雷达y向移动l3距离测量在x轴方向上到车辆的后部参考点的距离l1和到前部参考点的距离l2,根据三角函数tana=,利用反三角函数a=arctan,即可得出车辆的实际中心线相对于原中心线的偏离角度a;然后将激光扫描测距雷达的发射激光旋转角度a并且移动使其与实际中心线重合,将与原中心线平行的三轴校准杆旋转角度a,y向移动激光扫描测距雷达直至其发射的激光与三轴校准杆重合,移动距离记为h5;最后标记距离三轴校准杆h5并与三轴标准杆平行的直线,该直线即为实际中心线。该测量方法能够精确标定车辆的实际y0线,避免人工手动标定误差大以及需要多人合作才能完成的问题,本方案测量车辆中心线的方法自动化程度高、降低人工成本、提高标定效率以及提高标定精度。
16.2.被测车辆和标定装置均放置于一个平台上,激光扫描测距雷达、代表车辆的后部参考点的测量标准球和代表车辆的后部参考点的测量标准球均通过垂直标定装置相对于平台进行垂直方向和水平方向定位,保证了标定的准确性。
附图说明
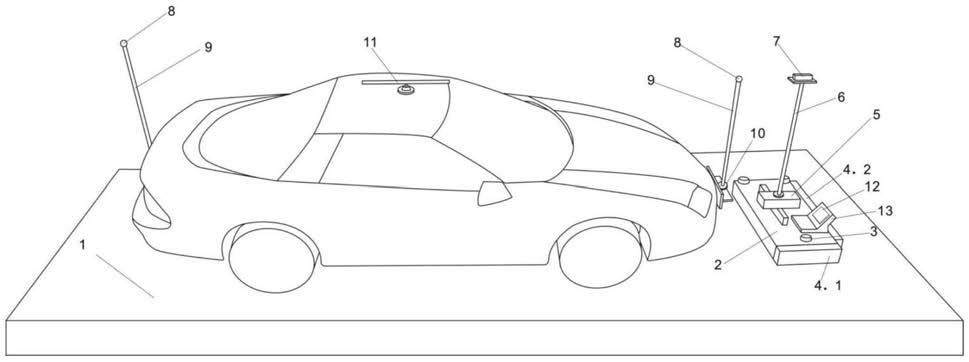
17.图1为本发明结构示意图;图2为车辆姿态检测装置的结构图;图3为前参考装置主视图;图4为前参考装置侧视图;图5为三轴校准杆装配后的效果图;图6为三轴校准杆的爆炸图;图7为找正装置局部放大图;
图8为三轴校准杆高度测量原理图;图9为本体支座安装校正原理图;图10为车辆偏移角度测量原理图;图11为图10的主视图;图12为三轴校准杆标定原理图;图13为车辆实际中心线划线原理图;图中:1-金属平台,2-本体支座,3-调平螺栓,4.1-水平仪一,4.2-水平仪二,5-两轴滑台,5.1-激光发射器二,5.2-激光发射器二,6-电动伸缩杆,7-激光扫描测距雷达,7.1、微调平台,7.2-激光接收器二,7.3-激光接收器二,8-金属球,9-伸缩杆,9.1-激光接收器一,9.2-激光接收器一,10-三轴云台车牌架,10.1-三轴云台,10.2-激光发射器一,10.3-激光发射器一,11-三轴校准杆,12-控制器,13-显示屏,14-靠尺;1100、气泵吸盘,1101、把手,1102、吸盘进气按钮,1103、吸盘排气阀,1104、防护罩,1105、电池,1106、姿态传感器一,1107、角度编码盘,1108、支撑托盘,1109、x轴方向调平杆,1110、x轴方向从动齿轮,1111、x轴方向主动齿轮,1112、x轴方向电机,1113、x轴方向无线信号接收器,1114、y轴方向托盘,1115、y轴方向调平杆,1116、y轴方向从动齿轮,1117、y轴方向主动齿轮,1118、y轴方向电机,1119、y轴方向无线信号接收器,1120、z轴方向托盘,1121、z轴方向调平杆,1122、z轴方向从动齿轮,1123、z轴方向主动齿轮,1124、z轴方向电机,1125、z轴方向无线信号接收器,1126、托盘,1127、过渡连接轴,1128、姿态传感器二,1129、无线通讯模块一,1130、校准杆本体,1131、光电接收器一,1132、支撑架,1133、激光发射器三;1134、光电接收器二,1135、无线通讯模块二,1136、立杆,1137、光栅尺。
具体实施方式
18.图1中,本发明的标定车辆中心线的系统包括车辆基准参考装置、车辆姿态检测装置、标定装置、控制器12;车辆基准参考装置包括结构相同的前参考装置、后参考装置,前参考装置、后参考装置分装在待标定车辆前后车牌照框里,用于通过两点获取车辆的基准中心线y0;待标定车辆位于预设的金属平台1上,车辆姿态检测装置的作用是自动移动和升降寻找车身车牌架上前参考装置、后参考装置垂直方向伸出来硬点,车辆姿态检测装置包括本体支座2,本体支座2设置金属平台1一端,放置时保证本体支座2两侧边与金属平台1两侧边相平行,沿本体支座2侧壁的x轴方向水平固定有的水平仪一4.1以及沿本体支座2侧壁的y轴方向水平固定有的水平仪二4.2;本体支座2上设有三个调平螺栓3,三个调平螺栓3中的两个位于本体支座2一侧的两个边角上,另一个位于相对侧的中心处,通过水平仪一4.1及水平仪二4.2的检测来测本体支座2上表面是否处于水平状态,并通过三个调平螺栓3进行调平,本体支座2上装有可沿本体支座2的x轴、y轴方向滑动的两轴滑台5,两轴滑台5立有电动伸缩杆(tjc-c4-p-p铁甲虫)6,电动伸缩杆6顶端装微调平台7.1,激光扫描测距雷达7为可旋转的360
°
激光扫描测距雷达,型号rplidar-a1,激光扫描测距雷达7装于微调平台7.1上,用于测量激光扫描测距雷达7至待标定车辆前参考装置、后参考装置之间的水平距离l2、l1;标定装置包括三轴校准杆11、用于测三轴校准杆11高度的测高装置、靠尺14;还包括用于根据激光扫描测距雷达7测量的数值获得车辆偏移角度的数据处理器,控制器12为西门子s7-300plc或单片机stc89c52,控制器根据数据处理器获得的车辆偏移角度进而控制
三轴校准杆11、激光扫描测距雷达7旋转,使三轴校准杆11中轴线、激光扫描测距雷达7发出的激光线与基准中心线y0相平行,进而测量三轴校准杆11中轴线与基准中心线y0之间距离h5,靠尺14用于以完成旋转后的三轴校准杆11为零点,通过测得的距离h5为标定线,在待标定车辆的顶部标定出实际中心线。
19.图2中,两轴滑台5包括沿本体支座2的y轴方向滑动的y轴滑台、设置于y轴滑台上沿本体支座2的x轴方向滑动的x轴滑台;x轴滑台上设有两个激光发射器二(5.1、5.2),两个激光发射器二(5.1、5.2)向上发射垂直校正激光束,微调平台7.1上设有与两个激光发射器二垂直对应的激光接收器二(7.2、7.3),依据发射的两个激光束检验微调平台7.1的x轴、y轴方向是否垂直,如果不垂直,调整微调平台7.1,直至两个激光接收器二(7.2、7.3)可以准确接收到校正激光束;这时就可以确定微调平台7.1处于水平面。
20.图3、图4中,前参考装置、后参考装置包括三轴云台车牌架10、装于三轴云台车牌架10上端中部的三轴云台10.1,立于三轴云台10.1上的伸缩杆9以及位于伸缩杆9顶端的金属球8,金属球8、伸缩杆9通过与三轴云台车牌架10固定在一起的三轴云台10.1一起调水平后,固定在汽车前后牌照框里,前、后参考装置的金属球8中心连线与车辆的基准中心线y0位于同一竖直平面;三轴云台车牌架10包括底板、连接于底板一侧的立板,立板上设有两个用于与车牌照框内螺栓安装孔对应固定的通过孔;三轴云台10.1上设有两个激光发射器一(10.2、10.3),伸缩杆9顶端侧壁经连接杆连接有与两个激光发射器一垂直对应的激光接收器一(9.1、9.2);伸缩杆9采用碳纤维材质。两个激光发射器一(10.2、10.3)向上方发射垂直激光束,伸缩杆9上的两个激光接收器一(9.1、9.2)依据发射的激光束检验伸缩杆9是否垂直,如果不垂直,说明伸缩杆9已经变形,需要更换新的伸缩杆9;更换新的伸缩杆9后继续按照此方法校准,直至垂直。
21.如图5、图6所示,三轴校准杆11包括气泵吸盘1100、校准杆本体1130、及用于控制校准杆本体根据激光扫描测距雷达7发射来的激光进行自动找正的找正装置;气泵吸盘1100两端分别设有一把手1101,气泵吸盘1100上的吸盘排气阀1103够排出气泵吸盘1100内的气体,形成气泵吸盘1100吸附车身的压力差,确保使用时气泵吸盘1100固定在车身上,吸盘进气按钮1102的作用是让空气进入气泵吸盘1100,使气泵吸盘1100内外压力一致,此时吸盘1脱离车身;气泵吸盘1100装有电池1105,用于给角度编码盘1107、x方向电机1112、y方向电机1118、z方向电机1124姿态传感器一1106、姿态传感器二1128、无线通讯模块一1129、无线通讯模块二1135等提供工作电源。找正装置外部找有防护罩1104,防护罩上端中部开有让位通孔,防护罩1104起到保护内部的各部件的作用,找正装置包括角度编码盘1107、找平装置,找平装置设置在角度编码盘1107的输出轴上,找平装置包括x轴方向找正机构、y轴方向找正机构和z轴方向找正机构,y轴方向找正机构装置在x轴方向找正机构的x轴方向调平杆1109上,z轴方向找正机构装置在y轴方向找正机构装置的y轴方向调平杆1115上,z轴方向找正机构装置的z轴方向调平杆1121上设有托盘1126;过渡连接轴1127竖直立在托盘1126上,过渡连接轴1127的顶端与校准杆本体1130中部垂直连接,校准杆本体1130为中空管结构,两端部均通过支撑架1132连接有一个用于接收激光的光电接收器一1131,两个光电接收器1131的中心轴与校准杆本体1130中心轴平齐;角度编码盘1107设置在气泵吸盘1100上,角度编码盘1107输出轴轴线与气泵吸盘1100中心线平齐;气泵吸盘1100上装有用于检测气泵吸盘1100上表面与水平方向之间的x、
y、z三轴的角度偏值的姿态传感器一1106,姿态传感器一1106与无线通讯模块一1129连接,用于将姿态传感器一1106检测信号发送给控制器,经过处理,控制x轴方向找正机构、y轴方向找正机构和z轴方向找正机构根据x、y、z三轴的角度偏值进行自动找正。
22.图7中,x轴方向找正机构包括固定在角度编码盘1107输出轴上的支撑托盘1108,x轴方向调平杆1109通过轴承支撑在支撑托盘1108的两侧壁上,x方向调平杆1109一端穿过支撑托盘1108的一个侧壁、顶端装有x轴方向从动齿轮1110,x轴方向电机1112的输出轴上装有x轴方向主动齿轮1111,x轴方向主动齿轮1111与x轴方向从动齿轮1110相啮合,电机的转速太快,通过齿轮的减速把速度降下来,这样就能很方便的调平;y轴方向找正机构包括y轴方向托盘1114,y轴方向托盘1114垂直固定在x轴方向调平杆1109上,y轴方向调平杆1115通过轴承支撑在y轴方向托盘1114的两侧壁上,y方向调平杆1115一端穿过y方向托盘1114的一个侧壁、顶端装有y轴方向从动齿轮1116,y轴方向电机1118的输出轴上装有y轴方向主动齿轮1117,y轴方向主动齿轮1117与y轴方向从动齿轮1116相啮合;z轴方向找正机构包括z轴方向托盘1120,z轴方向托盘1120垂直固定在y轴方向调平杆1115上,z轴方向调平杆1121通过轴承支撑在z轴方向托盘1120的两侧壁上,z方向调平杆1121一端穿过z方向托盘1120的一个侧壁、顶端装有z轴方向从动齿轮1122,z轴方向电机1124的输出轴上装有z轴方向主动齿轮1123,z轴方向主动齿轮1123与z轴方向从动齿轮1122相啮合。支撑托盘1108、y轴方向托盘1114、z轴方向托盘1120上分别装有x轴方向无线信号接收器(型号tak-lora-01)1113、y轴方向无线信号接收器(型号tak-lora-01)1119、z轴方向无线信号接收器(型号tak-lora-01)1125。x轴方向无线信号接收器1113接收来自姿态传感器一1106发射的x轴方向角度的信号,并把x轴方向角度信号传送给x轴方向电机1112,并通过x轴方向主动齿轮1111和x轴方向从动齿轮1110的啮合传动,使x轴方向调平杆1109上的y轴方向托盘1114托板处于水平状态;y轴方向无线信号接收器1119接收来自姿态传感器一1106发射的y轴方向角度的信号,并把y轴方向角度信号传送给y轴方向电机1118,并通过y轴方向主动齿轮1117和y轴方向从动齿轮1116的啮合传动,使y轴方向调平杆1115上的z轴方向托盘1120托板处于水平状态;同理,z轴方向无线信号接收器1125接收来自姿态传感器一1106发射的z轴方向角度的信号,并把z轴方向角度信号传送给z轴方向电机1124,并通过z轴方向主动齿轮1123和z轴方向从动齿轮1122的啮合传动,使z轴方向调平杆1121上的托盘1126托板处于水平状态,进而使过渡连接轴1127处于竖直状态。
23.托盘1126上装有用于实时检测托盘1126上表面与水平方向之间的x、y、z三轴的角度偏值的姿态传感器二1128,姿态传感器二1128与无线通讯模块二1135连接,用于将姿态传感器二1128检测信号发送给控制器,控制器将姿态传感器二1128的检测信号与姿态传感器一1106的检测信号进行比对后得出角度差值,并控制x轴方向找正机构、y轴方向找正机构和z轴方向找正机构根据角度差值进行差值补偿。姿态传感器二1128与姿态传感器一1106形成一个测量的闭环,姿态传感器二1128的信号不断修正姿态传感器一1106的角度差值;确保过渡连接轴1127处于垂直状态;姿态传感器二1128放置在闭环的末端,测量的数据更加准确,姿态传感器一1106放置在闭环前端,其测量数据反馈给执行部分,由于机构存在累积误差,导致托盘1126上的过渡连接轴1127角度有较大误差,通过闭环前后端比对,能够提升测量精度。
24.校准杆本体1130沿径向并排装有光电接收器二1134及激光发射器三1133,光电接
收器二1134位于校准杆本体1130中心,且与过渡连接轴1127垂直。
25.图8中,测高装置包括立杆1136、竖直装于立杆上的光栅尺1137,立杆1136立于待标定车辆一侧的金属平台1上,光栅尺1137的读数头上装有激光漫反射传感器,激光漫反射传感器接收到激光发射器三1133发射的激光后,发信号给控制器12控制光栅尺1137的读数头停止移动,并采集当前的高度值。
26.一种车辆中心线标定的方法,包括以下步骤:1)将待标定车辆置于预设的金属平台1上;2)标定系统的定位安装;3)车辆偏移角度的测量控制器12驱动两轴滑台5沿y轴方向移动,同时驱动电动伸缩杆6带动上方激光扫描测距雷达7进行上下微调,分别测量激光扫描测距雷达7至待标定车辆前参考装置、后参考装置之间的水平距离l2、l1;数据处理器根据a=arctan获取所述待标定车辆的车辆偏移角度,a为所述车辆偏移角度,l3为激光扫描测距雷达7测到前参考装置及后参考装置水平距离过程中两轴滑台5沿y轴方向所移动的行程;4)实际中心线的标定标定校准杆本体1130的零位;控制器12控制激光扫描测距雷达7、校准杆本体1130旋转角度a,使激光扫描测距雷达7的激光线、三轴校准杆11轴心线与基准中心线y0相平行,再驱动两轴滑台5沿y轴方向带动激光扫描测距雷达7从前参考装置或后参考装置向校准杆本体1130处移动,至激光扫描测距雷达7发射的激光线与三轴校准杆11轴心线再次重合,该过程中两轴滑台5沿y轴方向的移动距离记为h5;依据距离h5选取对应尺寸的靠尺14,将靠尺14靠到三轴校准杆11边上,利用平行的原理在待标定车辆车顶部标定出实际中心线,根据试验要求实际中心线上取两点,两点距离0.98m,根据标准0.98米的两点放置gps装置,至此标定工作完成。
27.在步骤4)中,控制器12根据测高装置测得的校准杆本体1130中轴线与地面间的高度,驱动电动伸缩杆6带动上方激光扫描测距雷达7进行上下微调,至激光扫描测距雷达7发射激光与校准杆本体1130中轴线位于同一平面内;控制器12继续驱动两轴滑台5沿y轴方向上移动,同时驱动角度编码盘1107转动使校准杆本体1130旋转,直至激光扫描测距雷达7发射的激光线与校准杆本体1130轴心线重合,此时准杆本体1130位置即为的零位。
28.在步骤1)中,前参考装置、后参考装置安装后,通过三轴云台10.1自动调平伸缩杆9基准平面,然后通过三轴云台10.1上的两个激光发射器一向上方发射两个平行的激光束,经过伸缩杆9上的两个激光接收器接收激光束,进而对伸缩杆9垂直度进行检测;在步骤2)中,将前参考装置、后参考装置分别安装在待标定车辆前后车牌照框里,安装后前参考装置、后参考装置的金属球8的中心连线与车辆的基准中心线y0同一竖直平面;将标定装置的三轴校准杆11固定在待标定车辆的车顶上;将车辆姿态检测装置放置于待标定车辆前方的金属平台1上,放置后保证本体支座2在x、y轴方向上与金属平台1相平行,后通过水平仪一4.1、水平仪二4.2及三个调平螺栓3使本体支座2上表面处于水平状态。
29.步骤2)中从本体支座2x轴方向的一侧壁取两点进行测量,使两点到金属平台1x轴方向侧壁的距离h1、h2相等,然后在y轴方向的一侧壁取两点进行测量,使两点到金属平台1y轴方向侧壁的距离h3、h4相等;此时本体支座2在x轴方向、y轴方向上与金属平台1相平行;本体支座2定位后,通过设置在两轴滑台5上的两个激光发射器二向上方发射两个平行的激光束,经过设置在微调平台7.1上的两个激光接收器接收激光束,微调平台7.1根据两个激光接收器接收的激光束状态进行微调使激光扫描测距雷达7处于水平面。
30.图9中,从本体支座x轴方向的一侧壁取两点进行测量,使两点到金属平台x轴方向侧壁的距离h1、h2相等,然后在y轴方向的一侧壁取两点进行测量,使两点到金属平台y轴方向侧壁的距离h3、h4相等;此时本体支座2在x轴方向、y轴方向上与金属平台1相平行。
31.图10、图11中,激光扫描测距雷达7发射激光,测量出到后参考装置的金属球的距离l1;两轴滑台5带动连接在电动伸缩杆6上的激光扫描测距雷达7沿y方向移动,测量出激光扫描测距雷达7至后参考装置的金属球的距离l2;两轴滑台5从l1到l2的过程中y方向所移动的行程是l3;根据三角函数tana=,利用反三角函数a=arctan就可以求出角度a,该角度a就是目前车辆前参考点与后参考点连线与金属平台1中心线的偏离夹角。
32.图12中,控制器12继续驱动两轴滑台5沿y轴方向上移动,同时驱动角度编码盘1107转动使校准杆本体1130旋转,直至激光扫描测距雷达7发射的激光线与校准杆本体1130轴心线重合,此时准杆本体1130位置即为的零位。
33.图13中,控制器12驱动激光扫描测距雷达7、校准杆本体1130旋转角度a,使激光扫描测距雷达7的激光线、三轴标准杆11轴心线与基准中心线y0相平行,再驱动两轴滑台5沿y轴方向带动激光扫描测距雷达7从前参考装置或后参考装置向校准杆本体1130处移动,至激光扫描测距雷达7发射的激光线与三轴校准杆11轴心线再次重合,该过程中两轴滑台5沿y轴方向的移动距离记为h5;最后,依据距离h5选取对应尺寸的靠尺14,一端靠在校准杆本体上另一端所在的线就是需要标定的实际y0线,利用平行的原理在车顶部标定出实际y0线,根据试验要求实际y0线上取两点,两点距离0.98m,根据标准0.98米的两点放置gps装置,至此标定工作完成。
34.需要说明的是,仪器测量过程中,需要进行校准工作,目的是排除在安装设备的过程中,由于温度,设备安装间隙等原因出现的垂直方向的误差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1