一种基于深度展开网络的近场源定位方法及系统
1.本发明涉及阵列信号处理和深度学习技术领域,更具体地说,特别涉及一种基于深度展开网络的近场源定位方法及系统。
背景技术:
2.近场源定位在近炸引信和无源雷达中发挥着重要作用。空间中的辐射源按照与接收阵列的距离可以分为远场源和近场源,远场源可以看做平面波入射,需要对波达方向参数进行估计;近场源需要由球面波进行描述,需要对波达方向和距离参数进行估计。
3.现有技术“deep learning based localization of near
‑
field sources with exact spherical wavefront model[j]”(27th european signal processing conference(eusipco),2019:第1页~第5页)采用卷积神经网络对近场源进行定位,该方法收敛速度快,但是泛化能力较差,即对没有经过训练的近场源参数进行估计时会出现较大的误差。
[0004]
现有技术“convolution neural networks for localization of near
‑
field sources via symmetric double
‑
nested array[j]”(wireless communications and mobile computing,2021,doi:10.1155/2021/9996780)采用嵌套对称阵列,能够在阵元数相同的情况下能够增大阵列孔径,从而提高近场源参数估计精度,但是该方法为“黑箱模型”,网络的参数不具备可解释性。
[0005]
现有技术“direction
‑
of
‑
arrival estimation with circular array using compressed sensing in 20ghz band[j]”(ieeeantennas andwireless propagation letters,2021,20(5):第703页~第707页)将迭代收缩阈值算法(iterative shrinkage thresholdingalgorithm,ista)展开为网络级联形式,实现对远场源波达方向估计。相较于传统的基于深度学习的数据驱动类方法,该方法将模型驱动的方法融入到网络结构设计中,使得网络的参数具备可解释性,泛化能力得到提高。但是该方法不能够实现近场源定位,并且只能对实数处理,不能对复数信号进行处理。
[0006]
为此,有必要设计一种基于深度展开网络的近场源定位方法及系统来克服上述技术问题。
技术实现要素:
[0007]
本发明的目的在于提供一种基于深度展开网络的近场源定位方法及系统,以克服现有技术所存在的缺陷。
[0008]
为了达到上述目的,本发明采用的技术方案如下:
[0009]
一种基于深度展开网络的近场源定位方法,包括:
[0010]
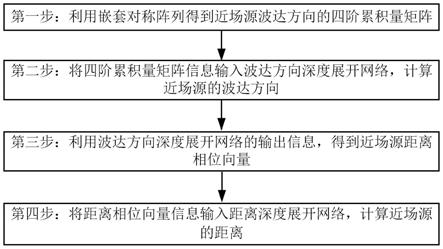
s1、利用嵌套对称阵列得到近场源波达方向的四阶累积量矩阵;
[0011]
s2、将四阶累积量矩阵的信息输入波达方向深度展开网络,计算近场源的波达方向;
[0012]
s3、利用波达方向深度展开网络的输出信息,得到近场源距离相位向量;
[0013]
s4、将距离相位向量的信息输入距离深度展开网络,计算近场源的距离。
[0014]
进一步地,所述步骤s1具体包括:
[0015]
嵌套对称阵列包括2m+1个阵元,设x
m
(n)表示第m个阵元的第n个采样点的数值,m=
‑
m,...,
‑
2,
‑
1,0,1,2,...,m,n=1,2,...,n,n为快拍数,利用下式计算第m1个阵元、第
‑
m1个阵元、第m2个阵元和第
‑
m2个阵元的四阶累积量c4(m1,m2):
[0016][0017]
其中(
·
)
*
表示取共轭复数运算,m1,m2=
‑
m,...,
‑
2,
‑
1,0,1,2,
…
,m,由四阶累积量构成m
×
m维的近场源波达方向的四阶累积量矩阵c,其中第(m1,m2)个元素为c4(m1,m2)。
[0018]
进一步地,所述步骤s2具体包括:
[0019]
首先、将四阶累积量矩阵c的实部和虚部向量化处理,得到向量
[0020][0021]
其中(
·
)
t
表示向量转置,real(
·
)表示取实部运算,imag(
·
)表示取虚部运算,表示四阶累积量矩阵c的第m3列,m3=
‑
m,...,
‑
2,
‑
1,0,1,2,...,m;
[0022]
然后、将输入波达方向深度展开网络,得到网络的输出即为近场源波达方向空间谱,l
θ
表示网络的层数,对近场源波达方向空间谱进行谱峰搜索,由谱峰所对应的位置即可确定近场源的波达方向估计值k=1,2,
…
,k,k表示近场源的数量。
[0023]
进一步地,所述波达方向深度展开网络的第1层的输出为
[0024][0025]
第l
θ
层的输出为
[0026][0027]
l
θ
=2,3,...,l
θ
,h
st
(
·
,ε)表示非线性变换函数,即
[0028]
h
st
(β,ε)=sgn(β)
⊙
max(|β|
‑
ε,0)
[0029]
sgn(
·
)表示符号函数,
⊙
表示hadamard积,波达方向深度展开网络的初始化参数
为:
[0030][0031][0032]
ε(θ)=0.05
[0033]
其中α(θ)=0.9/δ(θ),δ(θ)表示的最大特征值,i(θ)表示单位矩阵,表示波达方向冗余字典矩阵,即
[0034][0035][0036][0037]
其中,表示kronecker积,p=1,2,
…
,p,p表示波达方向采样点数,λ表示近场源的波长,表示第m3个阵元的位置。
[0038]
进一步地,在使用波达方向深度展开网络之前需对其进行训练,训练中使用随机梯度下降对网络参数ψ(θ)、φ(θ)、ε(θ)进行更新,优化的目标函数为:
[0039][0040]
其中,表示2
‑
范数的平方,||
·
||1表示1
‑
范数,μ表示正则化参数。
[0041]
进一步地,所述步骤s3具体包括:
[0042]
利用公式计算第k个近场源的距离相位向量g
k
:
[0043][0044]
其中arg(
·
)表示取相位运算,(
·
)
‑1表示求逆运算,表示求逆运算,u表示噪声子空间,可由下式计算
[0045][0046]
进一步地,所述步骤s4具体包括:
[0047]
首先、由距离相位向量g
k
的实部和虚部,得到向量
[0048][0049]
然后、将向量输入距离深度展开网络,得到网络的输出即为第k个近场源距离空间谱,l
r
表示网络的层数;
[0050]
最后、对近场源距离空间谱进行谱峰搜索,由谱峰所对应的位置即可确定近场源的距离估计值k=1,2,
…
,k,k表示近场源的数量。
[0051]
进一步地,所述距离深度展开网络的第1层的输出为
[0052][0053]
第l
r
层的输出为
[0054][0055]
其中,l
r
=2,3,...,l
r
;
[0056]
网络的初始化参数如下:
[0057][0058][0059]
ε(r)=0.05
[0060]
其中,α(r)=0.9/δ(r),δ(r)表示的最大特征值,i(r)表示单位矩阵,表示距离冗余字典矩阵:
[0061]
[0062]
b(r)=[b(r1) b(r2) ... b(r
q
)]
[0063]
其中,其中,m4=0,1,...,m,r
q
表示空间中距离采样,q=1,2,
…
,q,q表示距离采样点数。
[0064]
进一步地,在使用距离深度展开网络之前需对其进行训练,训练中使用sgd对网络参数ψ(r)、φ(r)、ε(r)进行更新,优化的目标函数为:
[0065][0066]
本发明还提供一种根据上述的基于深度展开网络的近场源定位方法的系统,包括:
[0067]
四阶累积量矩阵模块,用于利用嵌套对称阵列得到近场源波达方向的四阶累积量矩阵;
[0068]
第一计算模块,将四阶累积量矩阵的信息输入波达方向深度展开网络,计算近场源的波达方向;
[0069]
近场源距离相位向量模块,用于利用波达方向深度展开网络的输出信息,得到近场源距离相位向量;
[0070]
第二计算模块,用于将距离相位向量的信息输入距离深度展开网络,计算近场源的距离;
[0071]
所述四阶累积量矩阵模块、第一计算模块、近场源距离相位向量模块和第二计算模块依次连接。
[0072]
与现有技术相比,本发明的优点在于:本发明相较于传统神经网络,深度展开网络的参数具有可解释性,具有泛化能力,而相较于ista算法,本发明能够提高近场源波达方向的分辨力,加快收敛速度,提高参数估计精度。
附图说明
[0073]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0074]
图1本发明提供的基于深度展开网络的近场源定位方法流程图。
[0075]
图2本发明涉及的波达方向深度展开网络的结构示意图。
[0076]
图3本发明涉及的距离深度展开网络的结构示意图。
[0077]
图4利用嵌套对称阵列进行近场源定位的场景示意图。
[0078]
图5利用本发明得到的近场源在不同波达方向下的估计结果。
[0079]
图6利用本发明得到的近场源在不同波达方向下的估计误差。
[0080]
图7利用本发明得到的近场源在不同距离下的估计结果。
[0081]
图8利用本发明得到的近场源在不同距离下的估计误差。
[0082]
图9使用不同方法得到的近场源波达方向空间谱。
[0083]
图10使用不同方法得到的近场源波达方向nmse。
[0084]
图11使用不同方法得到的近场源距离nmse。
具体实施方式
[0085]
下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0086]
参阅图1所示,本实施例公开了一种基于深度展开网络的近场源定位方法,包括:
[0087]
步骤s1、利用嵌套对称阵列得到近场源波达方向的四阶累积量矩阵,具体为:
[0088]
由于已知天线阵列为嵌套对称排布,包括2m+1个阵元。设x
m
(n)表示第m个阵元的第n个采样点的数值,m=
‑
m,...,
‑
2,
‑
1,0,1,2,...,m,n=1,2,...,n,n为快拍数,利用下式计算第m1个阵元、第
‑
m1个阵元、第m2个阵元和第
‑
m2个阵元的四阶累积量c4(m1,m2):
[0089][0090]
其中,(
·
)
*
表示取共轭复数运算,m1,m2=
‑
m,...,
‑
2,
‑
1,0,1,2,...,m,由四阶累积量构成m
×
m维的近场源波达方向的四阶累积量矩阵c,其中第(m1,m2)个元素为c4(m1,m2)。
[0091]
在本实施例中,天线阵列优选嵌套对称线阵,这种阵列能够利用阵元对称的特点得到仅包含近场源波达方向的四阶累积量矩阵,并且在阵元数相同的情况下增大阵列孔径,提高参数估计精度。
[0092]
步骤s2、将四阶累积量矩阵的信息输入波达方向深度展开网络,计算近场源的波达方向,具体为:
[0093]
首先、将四阶累积量矩阵c的实部和虚部向量化处理,得到向量
[0094][0095]
其中,(
·
)
t
表示向量转置,real(
·
)表示取实部运算,imag(
·
)表示取虚部运算,表示四阶累积量矩阵c的第m3列,m3=
‑
m,...,
‑
2,
‑
1,0,1,2,...,m。
[0096]
然后、将向量输入波达方向深度展开网络,得到网络的输出即为近场源波达方向空间谱,l
θ
表示网络的层数。
[0097]
最后、对近场源波达方向空间谱进行谱峰搜索,由谱峰所对应的位置即可确定近场源的波达方向估计值k=1,2,
…
,k,k表示近场源的数量。
[0098]
其中,波达方向深度展开网络的结构如图2所示,其中第1层的输出为:
[0099][0100]
第l
θ
层的输出为:
[0101][0102]
l
θ
=2,3,...,l
θ
,h
st
(
·
,ε)表示非线性变换函数,即:
[0103]
h
st
(β,ε)=sgn(β)
⊙
max(|β|
‑
ε,0)
[0104]
sgn(
·
)表示符号函数,
⊙
表示hadamard积,波达方向深度展开网络的初始化参数如下:
[0105][0106][0107]
ε(θ)=0.05
[0108]
其中,α(θ)=0.9/δ(θ),δ(θ)表示的最大特征值,i(θ)表示单位矩阵,表示波达方向冗余字典矩阵,即:
[0109][0110][0111][0112]
其中,表示kronecker积,p=1,2,
…
,p,p表示波达方向采样点数,λ表示近场源的波长,表示第m3个阵元的位置。
[0113]
值得说明的是,在使用波达方向深度展开网络是必须先对它进行训练,训练中使用随机梯度下降(stochasticgradientdescent,sgd)对网络参数ψ(θ)、φ(θ)、ε(θ)进行更新,优化的目标函数为:
[0114][0115]
其中、表示2
‑
范数的平方,||
·
||1表示1
‑
范数,μ表示正则化参数。
[0116]
步骤s3、利用波达方向深度展开网络的输出信息,得到近场源距离相位向量,具体为:利用下式计算第k个近场源的距离相位向量g
k
:
[0117][0118]
其中,arg(
·
)表示取相位运算,(
·
)
‑1表示求逆运算,表示求逆运算,u表示噪声子空间,可由下式计算:
[0119][0120]
步骤s4、将距离相位向量的信息输入距离深度展开网络,计算近场源的距离,具体为:
[0121]
首先、由距离相位向量g
k
的实部和虚部,得到向量
[0122][0123]
然后、将向量输入距离深度展开网络,得到网络的输出即为第k个近场源距离空间谱,l
r
表示网络的层数。
[0124]
最后、对近场源距离空间谱进行谱峰搜索,由谱峰所对应的位置即可确定近场源的距离估计值k=1,2,
…
,k,k表示近场源的数量。
[0125]
本实施例中的距离深度展开网络的结构如图3所示,其中第1层的输出为:
[0126][0127]
第l
r
层的输出为:
[0128][0129]
其中l
r
=2,3,...,l
r
。
[0130]
距离深度展开网络的初始化参数如下:
[0131][0132][0133]
ε(r)=0.05
[0134]
其中α(r)=0.9/δ(r),δ(r)表示的最大特征值,i(r)表示单位矩阵,表示距离冗余字典矩阵,即
[0135][0136]
b(r)=[b(r1) b(r2)
ꢀ…ꢀ
b(r
q
)]
[0137]
其中,其中,m4=0,1,...,m,r
q
表示空间中距离采样,q=1,2,
…
,q,q表示距离采样点数。
[0138]
在本实施例中,在使用距离深度展开网络之前必须先对其进行训练,训练中使用sgd对网络参数ψ(r)、φ(r)、ε(r)进行更新,优化的目标函数为:
[0139][0140]
本发明还提供一种根据上述的基于深度展开网络的近场源定位方法的系统,包括:四阶累积量矩阵模块,用于利用嵌套对称阵列得到近场源波达方向的四阶累积量矩阵;第一计算模块,将四阶累积量矩阵的信息输入波达方向深度展开网络,计算近场源的波达方向;近场源距离相位向量模块,用于利用波达方向深度展开网络的输出信息,得到近场源距离相位向量;第二计算模块,用于将距离相位向量的信息输入距离深度展开网络,计算近场源的距离;其中,四阶累积量矩阵模块、第一计算模块、近场源距离相位向量模块和第二计算模块依次连接。
[0141]
为验证本发明对近场源的定位性能,通过四个仿真实验进行说明。
[0142]
仿真实验一
[0143]
在该仿真实验中,两级嵌套对称线阵如图4所示,阵元个数为17,m=8,实心圆圈表示第一级子阵,间距为λ/8,空心圆圈表示第二级子阵,间距为5λ/8。以1
°
和1λ为间隔分别对波达方向[
‑
60
°
,60
°
]和距离[5λ,30λ]进行均匀采样产生近场源的训练样本,快拍数n为10000。波达方向深度展开网络的层数l
θ
和距离深度展开网络的层数l
r
均为50,在训练两个深度展开网络的过程中,epoch均设置为300,mini
‑
batch均设置为32。
[0144]
仿真实验一用于验证本发明对近场源波达方向估计的泛化能力,实验中近场源的距离设置为10λ,在空域中产生3组测试样本,第1组测试样本波达方向设置为
‑
59.99
°
,
‑
58.99
°
,
…
,
‑
0.99
°
,0.01
°
,1.01
°
,
…
,59.01
°
,第2组测试样本波达方向设置为
‑
59.90
°
,
‑
58.90
°
,
…
,
‑
0.90
°
,0.10
°
,1.10
°
,
…
,59.10
°
,第3组测试样本波达方向设置为
‑
59.70
°
,
‑
58.70
°
,
…
,
‑
0.70
°
,0.30
°
,1.30
°
,
…
,59.30
°
,共计360个测试样本。图5为利用本发明获得
的波达方向估计结果,横坐标为测试样本编号,纵坐标为波达方向的估计结果,图6为利用本发明获得的波达方向估计误差,横坐标为测试样本编号,纵坐标为波达方向的估计误差。可以看出第一组和第二组测试样本的波达方向估计误差分别为0.01
°
和0.1
°
,第三组测试样本的波达方向估计误差在1
°
以内,表明本发明对近场源波达方向估计具有泛化能力。
[0145]
仿真实验二
[0146]
该仿真实验用于验证本发明对近场源距离估计的泛化能力,实验中近场源的波达方向设置为30
°
,在空域中产生3组测试样本,第1组测试样本距离设置为5.01λ,6.01λ,
…
,29.01λ,第2组测试样本距离设置为5.10λ,6.10λ,
…
,29.10λ,第3组测试样本距离设置为5.30λ,6.30λ,
…
,29.30λ,共计75个测试样本。图7为利用本发明获得的距离估计结果,横坐标为测试样本编号,纵坐标为距离估计结果,图8为利用本发明获得的距离估计误差,横坐标为测试样本编号,纵坐标为距离估计误差。可以看出第一组和第二组测试样本的距离估计误差为0.01λ和0.1λ,第三组测试样本的距离估计误差在1λ以内,表明本发明对近场源距离估计具有泛化能力。
[0147]
仿真实验三
[0148]
该仿真实验用于验证本发明对近场源波达方向的分辨力,实验中两个近场源的位置分别设置为(15
°
,25λ)、(20
°
,10λ)。图9表示近场源空间谱,其中横轴表示波达方向,纵轴表示空间谱强度,菱形点表示真实波达方向,实线表示利用本发明得到的近场源的波达方向空间谱,虚线表示利用ista算法经过50次迭代得到的近场源的波达方向空间谱,可以看出本发明得到的空间谱出现两个峰值,两个峰值所在位置分别对应近场源的波达方向,而ista算法无法对两个近场源的波达方向进行分辨,表明本发明可以提高波达方向的分辨力。
[0149]
仿真实验四
[0150]
该仿真实验用于验证本发明收敛速度。图10和图11分别为近场源的波达方向和距离参数的归一化均方根误差(normalizedmean squarederror,nmse),其中横坐标表示深度展开网络层数或者ista算法的迭代次数,纵坐标表示训练样本的nmse,加
“○”
的实线表示本发明的nmse,加
“◇”
的虚线表示ista算法的nmse。可以看出随着网络层数/迭代次数增加,本发明和ista算法nmse逐渐减小,在相同的网络层数或迭代次数下,本发明具有更快的收敛速度和更高的参数估计精度。
[0151]
虽然结合附图描述了本发明的实施方式,但是专利所有者可以在所附权利要求的范围之内做出各种变形或修改,只要不超过本发明的权利要求所描述的保护范围,都应当在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1