一种基于定向天线和多普勒信息的运动载体导航方法和装置与流程
1.本发明属于运动平台导航技术领域,特别涉及一种基于定向天线和多普勒信息的运动载体导航方法和装置。
背景技术:
2.目前车辆、舰船、飞机、导弹等运动载体普遍采用惯性、卫星以及各种组合导航技术。然而gps/bd等导航定位系统由于导航终端普遍采用全向天线(尽管已有各种抗干扰天线出现和应用),非常容易被干扰和欺骗。在复杂环境和对抗环境下,各运动载体不能仅依赖卫星导航作为手段。惯性导航方式可以实现自主导航,但其误差会随时间积累,对于长时间、高精度导航来说其精度难以满足要求。当前无人系统发展迅速,智能化程度越来越高,对高精度抗干扰导航要求非常迫切。
技术实现要素:
3.为了克服上述现有技术的缺点,针对运动载体导航需求,本发明的目的在于提供一种基于定向天线和多普勒信息的运动载体导航方法和装置,能够实现在gps/bd等导航定位系统失效的情况下,利用地球同步通信卫星等固定或移动信标的位置和信标信号,在运动载体上进行信号处理,从而实现一种低成本的应急导航定位系统,满足车辆、舰船、飞机、导弹等运动载体的一定精度导航定位信息。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种基于定向天线和多普勒信息的运动载体导航方法,包括以下步骤:
6.s1:已知运动载体的精确初始位置、固定或者移动的信标位置信息,所述运动载体搭载有定向天线;
7.s2:基于所述定向天线的天线波束控制系统利用惯性测量组件或惯性导航系统辅助,在运动载体的运动过程中保持定向天线始终对准信标,输出对准时的运动载体姿态角及运动载体姿态角偏差;
8.s3:利用多普勒频移跟踪模块接收定向天线获得的信标信号,并测量获得信标信号中由于运动载体运动带来的多普勒频率信息;
9.s4:基于定向天线对准信标时运动载体姿态角及运动载体姿态角偏差、信标位置信息以及运动载体接收到的信标信号多普勒频率信息,修正惯性测量组件或者惯性导航系统的误差,最后输出修正后的运动载体导航位置信息。
10.本发明的一个实施例,所述s1中:
11.当固定或者移动的信标有多个时,选择使用多个定向天线,s2、s3中实现多个波束对准多个信标,并获得多个多普勒频率和波束指向信息;s4导航计算时利用多个多普勒频率和波束指向信息,提高修正的精度。
12.本发明所述运动载体可为导弹、飞机、舰船或车辆,所述固定的信标可为地球同步通信卫星,所述移动的信标可为地球非同步轨道通信卫星,所述定向天线可为反射面天线、
平板天线或相控阵天线。
13.本发明的一个实施例,所述s2中,包括以下步骤:
14.s2.1:在运动载体的运动过程中,在惯性测量组件或惯性导航系统的辅助下,获得运动载体的运动信息,即运动载体的经纬度信息、姿态角以及姿态角变化率;
15.s2.2:利用运动载体的经纬度信息、姿态角以及信标位置确定定向天线的天线波束在地理系的方位角a、俯仰角e、极化角v,并利用天线波束控制系统实现波束调整,使定向天线初步对向信标,实现信标信号的捕获;
16.s2.3:定向天线捕获到信标信号后,以信号极大值方式精对准信标,完成信标稳定跟踪,并得到精对准时定向天线的天线波束在地理系实际的方位角a
t
与俯仰角e
t
;
17.s2.4:实现波束跟踪后,根据方位角和俯仰角控制偏差信号,获得运动载体的姿态角偏差,所述运动载体的姿态角偏差即方位角a、俯仰角e与实际的方位角a
t
、俯仰角e
t
之间的偏差。
18.本发明的一个实施例,所述定向天线的天线波束在地理系的方位角a、俯仰角e、极化角v如下:
[0019][0020]
其中,l为运动载体所在点的纬度,pi为π,λ为运动载体的经度,λ
s
为信标星下点的经度;
[0021]
所述s2.3中,捕获信标信号后,对a、e进行精对准,即调制天线波束方向,直至接收到的信标信号能量最大,此时即认为实现了精对准,精对准后即得到定向天线的天线波束在地理系实际的方位角a
t
与俯仰角e
t
。
[0022]
本发明的一个实施例,所述信标信号中由于运动载体运动带来的多普勒频率信息包括真实的多普勒频率和多普勒频率误差δf,其中:
[0023][0024]
δf=δv
r
·
e
rs
·
c/f
carrier
=δv
a
·
c/f
carrier
[0025]
式中:v
r
是运动载体在ecef(地心地固坐标系)坐标系中的速度,δv
r
是运动载体在ecef坐标系中的速度误差,v
s
是信标在ecef坐标系中的速度,e
rs
是运动载体到信标的视线方向在ecef坐标系中的单位矢量,c是光速,f
carrier
是载波频率,δv
a
是运动载体在运动载体到卫星视频方向的速度误差。
[0026]
本发明还提供了一种基于定向天线和多普勒信息的运动载体导航装置,包括:
[0027]
惯性测量组件或者惯性导航系统:搭载于运动载体,用于获取运动载体的运动信息,即运动载体经纬度信息、运动载体的姿态角以及姿态角变化率;
[0028]
定向天线:搭载于运动载体,用于产生具有明显方向性的天线波束
[0029]
波束控制模块:搭载于运动载体,利用运动载体经纬度信息、运动载体的姿态角以
及信标位置确定定向天线的方位角、俯仰角,并按照信号能量最大的原则控制波束调整,实现定向天线精准对信标;
[0030]
多普勒频移跟踪模块:搭载于运动载体,完成信标信号的滤波、处理和多普勒频率跟踪,获得多普勒频移信息;
[0031]
导航计算模块:搭载于运动载体,根据定向天线对准信标时的运动载体姿态角及姿态角偏差、信标位置信息、运动载体接收到的信标信号多普勒频率信息,修正惯性测量组件或者惯性导航系统的误差,输出修正后的运动载体导航位置信息。
[0032]
本发明的一个实施例,所述定向天线的主瓣用于接收信号,主瓣的宽度尽量窄并且增益高,天线覆盖频率应当能够满足接收跟踪信标信号的要求,副瓣应尽可能小以增强抗干扰性。
[0033]
与现有技术相比,本发明的有益效果是:运动载体的初始精确位置和信标的位置为已知条件。惯性测量组件imu或者惯性导航系统ins存在积累误差,但在短时间内其输出的运动载体经纬度信息、运动载体的姿态角以及姿态角变化率能够满足定向天线初步捕获信标信号;定向天线捕获到信标信号后,以波束控制模块以信号极大值方式自动对准信标,完成信标稳定跟踪,这种方式可以实现得到此时运动载体定向天线的指向信息即运动载体的姿态角偏差;多普勒频移跟踪模块可以获得运动载体和信标间的相对运动多普勒频移信息;根据运动载体的姿态角及姿态角偏差、信标位置信息、运动载体接收到的信标信号多普勒频率信息作为输入,可以用来修正惯性测量组件imu或者惯性导航系统 ins的运动载体经纬度信息、运动载体的姿态角以及姿态角变化率,从而输出修正后的运动载体导航位置信息。
附图说明
[0034]
图1为本发明导航方法步骤图。
[0035]
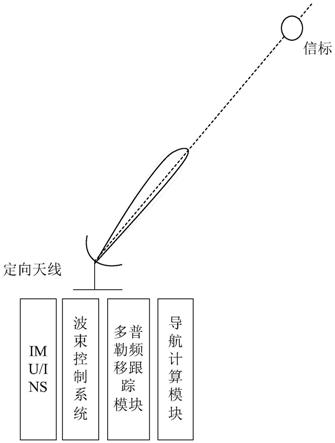
图2为本发明导航装置原理示意图。
[0036]
图3为本发明导航装置原理框架图。
[0037]
图4为本发明一个实例中运动载体、卫星信标以及坐标关系示意图。
[0038]
图5为本发明一个实例中运动载体位置修正前后对比图。
[0039]
图6为本发明一个实例组合导航中,估计的载体在东向与北向姿态角的误差,单位为角秒。
[0040]
图7为本发明一个实例的组合导航中,估计的载体在天向姿态角的误差,单位为角分。
[0041]
图8为本发明一个实例的组合导航中,估计的载体的速度误差,单位为m/s。
[0042]
图9为本发明一个实例的组合导航中,估计的载体的位置误差,单位为m。
具体实施方式
[0043]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和出示的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的
实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0044]
如图1所示,本发明提供了一种基于定向天线和多普勒信息的运动载体导航方法,包括以下步骤:
[0045]
s1:已知运动载体的精确初始位置、固定或者移动的信标位置信息,所述运动载体搭载有定向天线。
[0046]
在本发明中,运动载体可为导弹、飞机、舰船或车辆等,固定的信标可为地球同步通信卫星等,移动的信标可为地球非同步轨道通信卫星等。定向天线可为反射面天线、平板天线或各种类型相控阵天线。
[0047]
当固定或者移动的信标有多个时,可根据使用环境和其它限制优化固定选择其中一个,并根据策略在运行过程中切换,也可选择多个信标,并选择使用多个定向天线。
[0048]
s2:基于所述定向天线的天线波束控制系统利用惯性测量组件(imu)或惯性导航系统(ins)辅助,在运动载体的运动过程中保持定向天线始终对准信标,输出对准时的运动载体姿态角及运动载体姿态角偏差。具体包括以下步骤:
[0049]
s2.1:在运动载体的运动过程中,在惯性测量组件或惯性导航系统的辅助下,获得运动载体的运动信息,即运动载体的经纬度信息、姿态角以及姿态角变化率;
[0050]
s2.2:利用运动载体的经纬度信息、姿态角以及信标位置确定定向天线的天线波束在地理系的方位角a、俯仰角e、极化角v,并利用天线波束控制系统实现波束调整,使定向天线初步对向信标,实现信标信号的捕获;
[0051]
s2.3:定向天线捕获到信标信号后,以信号极大值方式精对准信标,完成信标稳定跟踪,并得到精对准时定向天线的天线波束在地理系实际的方位角a
t
与俯仰角e
t
;
[0052]
s2.4:实现波束跟踪后,根据方位角和俯仰角控制偏差信号,获得运动载体的姿态角偏差,所述运动载体的姿态角偏差即方位角a、俯仰角e与实际的方位角a
t
、俯仰角e
t
之间的偏差。
[0053]
运动载体运动过程中,imu或ins不断的测量出车体的姿态变化,并利用波束控制系统调整波束指向,以保证定向天线波束始终指向信标并持续跟踪。
[0054]
s3:利用多普勒频移跟踪模块接收定向天线获得的信标信号,并测量获得信标信号中由于运动载体运动带来的多普勒频率信息。当s1选择多个信标和多个定向天线时,多个波束对准多个信标,可获得多个多普勒频率和波束指向信息。
[0055]
s4:基于定向天线对准信标时运动载体姿态角及运动载体姿态角偏差、信标位置信息以及运动载体接收到的信标信号多普勒频率信息,修正惯性测量组件或者惯性导航系统的误差,最后输出修正后的运动载体导航位置信息。当s1 选择多个信标和多个定向天线时,导航计算利用多个多普勒频率和波束指向信息,提高修正的精度。
[0056]
本发明利用定向天线指向信息、运动载体姿态角偏差、信标位置信息、多普勒信息修正得到的导航信息可以修正惯性测量组件imu或者惯性导航系统 ins的误差累积,实现高精度的导航信息输出;上述方法和装置仅利用定向天线接收\跟踪信标信号,由于运动载体不断运动,干扰或欺骗信号难以通过定向天线主瓣进入,是一种抗干扰的导航方法。
[0057]
参考图2和图3,本发明还提供了一种基于定向天线和多普勒信息的运动载体导航
装置,包括:
[0058]
惯性测量组件或者惯性导航系统:搭载于运动载体,用于获取运动载体的运动信息,即运动载体经纬度信息、运动载体的姿态角以及姿态角变化率。
[0059]
定向天线:搭载于运动载体,用于产生具有明显方向性的天线波束。主瓣用于接收信号,主瓣的宽度尽量窄并且增益高,天线覆盖频率应当能够满足接收跟踪信标信号的要求,副瓣应尽可能小以增强抗干扰性。
[0060]
波束控制模块:搭载于运动载体,利用运动载体经纬度信息、运动载体的姿态角以及信标位置确定定向天线的方位角、俯仰角,并按照信号能量最大的原则控制波束调整,实现定向天线精准对信标。
[0061]
多普勒频移跟踪模块:搭载于运动载体,完成信标信号的滤波、处理和多普勒频率跟踪,获得多普勒频移信息。
[0062]
导航计算模块:搭载于运动载体,根据定向天线对准信标时的运动载体姿态角及姿态角偏差、信标位置信息、运动载体接收到的信标信号多普勒频率信息,修正惯性测量组件或者惯性导航系统的误差,输出修正后的运动载体导航位置信息。
[0063]
在本发明的一个具体实施例中,选择通信卫星作为信标,选择通信卫星或载波为跟踪信号源,运动载体、卫星信标以及坐标关系如图4所示,设运动载体(在北半球)所在点的经纬度分别为λ(东经为正,西经为负)、l;卫星星下点的经度为λ
s
。
[0064]
符号定义:
[0065]
[v
e
,v
n
,v
u
]
t
是运动载体在东北天坐标下的速度矢量;
[0066]
[δv
e
,δv
n
,δv
u
]
t
是运动载体速度误差矢量;
[0067]
[λ,l,h]
t
是运动载体的经
‑
纬
‑
高表达形式下的位置矢量;
[0068]
[δλ,δl,δh]
t
为相应的误差矢量;
[0069]
[e
x
,e
y
,e
z
]
t
是运动载体相对通信卫星视线方向在ecef坐标系下的单位矢量;
[0070]
r
n
地球半径,f地球的偏心率。
[0071]
球面坐标系到直角坐标系的转换:
[0072]
x=(r
n
+h)coslcosλ
[0073]
y=(r
n
+h)coslsinλ
[0074]
z=[r
n
(1
‑
f)2+h]sinl
[0075]
根据图4所示:
[0076]
λ
delta
=λ
‑
λ
sat
[0077]
x
b2s
=
‑
(r
e
+h
sat
)
·
sinλ
delta
[0078]
y
b2s
=
‑
(r
e
+h
sat
)
·
cosλ
delta
·
sinl
[0079]
z
b2s
=(r
e
+h
sat
)
·
cosλ
delta
·
cosl
‑
r
e
‑
alt
b
[0080]
其中:
[0081][0082]
[0083][0084]
化简可得:
[0085][0086]
此即为定向天线的天线波束在地理系的方位角a、俯仰角e、极化角v,可以称为静态对星角。其中,pi即为π,λ为运动载体的经度,λ
s
为信标星下点的经度。
[0087]
在s2中,运动载体运动过程中对星的过程是,通过运动载体大概的经纬度,可以算出计算出目标卫星信标在地理系的方位角a、俯仰角e、极化角v,将天线调整到相应的角度后,开始对星,捕获卫星波束后,再对波束方位角与俯仰角进行精对准,即调制天线波束方向,直至接收到的信标信号能量最大,此时即认为实现了精对准,精对准后即得到定向天线的天线波束在地理系实际的方位角a
t
与俯仰角e
t
。
[0088]
在s3中,采用ecef坐标进行处理,由llh到ecef的位置关系转换为:
[0089]
x=(r
n
+h)coslcosλ
[0090]
y=(r
n
+h)coslsinλ
[0091]
z=[r
n
(1
‑
f)2+h]sinl
[0092]
从llh到ecef的坐标转换关系为:
[0093][0094][0095]
从ecef到llh的坐标转换关系为:
[0096][0097]
接收机测量信标信号中由于运动载体运动带来的多普勒频率信息包括真实的多普勒频率和多普勒频率误差δf:
[0098][0099][0100]
δf=δv
r
·
e
rs
·
c/f
carrier
=δv
a
·
c/f
carrier
[0101]
式中:
[0102]
是真实的多普勒频率
[0103]
δf是多普勒频率误差
[0104]
c是光速
[0105]
f
carrier
是载波频率
[0106]
v
r
是运动载体在ecef坐标系中的速度
[0107]
v
s
是目标卫星在ecef坐标系中的速度
[0108]
δv
r
是运动载体在ecef坐标系中的速度误差
[0109]
e
rs
是运动载体到目标卫星的视线方向在ecef坐标系中的单位矢量
[0110]
δv
a
是运动载体在运动载体到卫星视频方向的速度误差
[0111][0112]
由于目标卫星为赤道同步轨道卫星,v
s
基本为0,所以
[0113][0114][0115]
v
a
=(
‑
v
e
sinλ
‑
v
n
sinlcosλ+v
u
coslcosλ)e
x
[0116]
+(v
e
cosλ
‑
v
n
sinlsinλ+v
u
coslsinλ)e
y
[0117]
+(v
n
cosl+v
u
sinl)e
z
[0118]
式中:
[0119][0120]
δx=x
(s)
‑
x
r
=(r
n
+h
sat
)cosλ
sat
‑
(r
n
+h
r
)coslcosλ
[0121]
δy=y
(s)
‑
y
r
=(r
n
+h
sat
)sinλ
sat
‑
(r
n
+h
r
)coslsinλ
[0122]
δz=z
(s)
‑
z
r
=
‑
[r
n
(1
‑
f)2+h
r
]sinl
[0123]
由于式中λ和l的变化对[e
x e
y e
z
]的影响非常小,所以在微分的时候,可以将[e
x e
y e
z
]看成一个常量来处理。
[0124]
对上式求微分,得其误差形式:
[0125]
δv
a
=[(
‑
v
n
cosl
‑
v
u
sinl)(e
x
cosλ+e
y
sinλ)+(
‑
v
n
sinl+v
u
cosl)e
z
]δl +[(v
n
sinlsinλ
‑
v
e
cosλ
‑
v
u
coslsinλ)e
x
+(
‑
v
n
sinlcosλ
‑
v
e
sinλ+v
u
coslcosλ)e
z
]δλ (
‑
e
x
sinlcosλ
‑
e
y
sinlsinλ+e
z
cosl)δv
n
+(
‑
e
x
sinλ+e
y
cosλ)δv
e
+ (e
x
coslcosλ+e
y
coslsinλ+e
z
sinl)δv
u
[0126]
从上式可以看出,运动载体相对卫星速度(多普勒频率)对经度、纬度以及东、北、天向速度都有可观测性,利用此信息可对经度、纬度定位信息以及东、北、天向速度信息进
行修正。
[0127]
s4中,由于载体的姿态精确已知,在此基础上利用惯性导航得到的载体运行轨迹在空间内走向是确定的,又由s1可以精确知道载体的初始位置,则这条空间内的轨迹只受加速度传感器的零偏造成其积分的速度与位置误差。利用s3 得到的多普勒频率与速度和位置的可观性,可以估计加速度传感器的零偏,从而对速度与位置误差进行修正。
[0128]
在本实施例中,构建状态空间模型如下:
[0129][0130]
表示状态过程更新方程,x是状态量组合滤波器,采用扩展卡尔曼滤波器等组合滤波器,可以对状态x进行估计。
[0131]
z=hx+v表示量测方程,z是观测量状态空间模型,
[0132]
式中,为运动载体的航向与姿态在东向、北向与天向三个方向上的误差,通过[θ γ ψ]与运动载体ins当前航姿计算得到;θ是动中通系统通过波束扫描得到的惯导的俯仰角量测值;γ是惯性导航系统通过重力观测到横滚角测量值;ψ是动中通系统通过波束扫描得到的惯导的方位角量测值;δv
n
为运动载体的速度误差;δp为运动载体的位置误差;ε
b
为惯性导航系统的角速度零偏;为惯性导航系统的加速度计零偏。
[0133]
为惯性导航系统的东向误差;为惯性导航系统的北向误差;为惯性导航系统的天向误差;δv
a
是动中通接收到的信标的多普勒频率测量出来的动中通与信标的相对速度误差;δl为利用s1计算出来的当地纬度误差;δλ为利用s1计算出来的当地经度误差;δalt为利用气压计计算出来的当地高度误差。
[0134]
其中:
[0135]
f为过程更新矩阵:
[0136][0137]
式中:
[0138][0138]
表示以为矢量的反对称矩阵,m
ap
=m1+m2,,m
vp
=(v
n
×
)(2m1+m2)+m3,
[0139]
为地球自转以及运动载体在地球表面运动产生的角速度在导航坐标系中的投影;是陀螺测量的角速度以及加速度计测量的比力;分别是陀螺测量的载体相对惯性坐标系旋转量在载体坐标系x,y,z轴上的投影,分别是载体比力在载体坐标系 x,y,z轴上的投影;是导航坐标系下的比力,标系下的比力,为运动载体在导航坐标系下的东向向速度,为运动载体在导航坐标系下的北向速度,为运动载体在导航坐标系下的天向速度;为地球自转矢量在导航坐标系中的投影;ω
ie
=7.2921151467
×
10
‑5rad/s,是地球自转角速度;为载体在地球表面运动产生的角速度在导航坐标系中的投影;l为运动载体所在位置的纬度;r
mh
=r
m
+h,r
nh
=r
n
+h,r
m
,r
n
分别为地球的子午圈主曲率半径和卯酉圈主曲率半径,h为海拔高度;g=g0(1+β1sin2l+β2sin4l)
‑
β3h,为重力加速度大小,β1=5.27094
×
10
‑3,β2=2.32718
×
10
‑5,β3=2g0/r
e
=3.086
×
10
‑6(1/s2)为重力加速度拟合多项式参数;为从载体坐标系向导航坐标系的旋转矩阵,表示中的第i列,例如表示的第2列,g0=9.80616m/s2是重力加速度多项式常量;g为噪声输入驱动矩阵,w为状态更新的过程噪声。
[0140]
h为量测矩阵:
[0141][0142]
其中:
[0143]
fd1×5=[f
d
v
e f
d
v
n f
d
v
u f
d
λ f
d
l]
[0144]
f
d
v
e
=
‑
e
x
sinλ+e
y
cosλ
[0145]
f
d
v
n
=
‑
e
x
sinlcosλ
‑
e
y
sinlsinλ+e
z
cosl
[0146]
f
d
v
u
=e
x
coslcosλ+e
y
coslsinλ+e
z
sinl
[0147][0148][0149]
i3×3是三行三列的单位矩阵,[e
x
,e
y
,e
z
]
t
是运动载体相对通信卫星视线方向在 ecef坐标系下的单位矢量;λ为运动载体的经度,l为运动载体的纬度。
[0150]
采用自制的陀螺阵列imu,更新率100hz,以车辆作为运动载体并选择一条行驶路径。将gps的东、北、天向速度通过坐标变换得到了运动载体相对目标卫星的los速度,做作量测值进行组合导航,在600秒到1200秒间gps不再参与导航,利用上述算法进行组合导航。组合导航的结果如图5、图6~图9 所示。
[0151]
其中图5中线条a表示采用本发明方法进行组合导航的位置轨迹,线条b 表示gnss定位设备给出的参考位置轨迹,可看出基于本发明的导航与参考轨迹比较吻合。
[0152]
从图6~图9可以看出,采用本方法用例的组合导航中,估计的位置误差在经度与纬度方向上最大不超过200米,可应用于在gnss无效情况下的组合导航。
[0153]
从结果可知,本发明提出的导航方法和装置可以在不依赖gnss的情况下,有效修正imu的积累误差,实现一定精度的导航位置输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1