一种竖井掘进位姿测量装置及方法与流程
1.本发明涉及掘进机姿态检测技术领域,特别是涉及一种竖井掘进位姿测量装置及方法。
背景技术:
2.竖井掘进机的成井质量很大程度上取决于掘进过程中的姿态监测以及偏斜控制,传统的竖井定向依靠传统的吊线和激光方式,吊线时垂直度和标高控制方法存在着工作过程繁琐、效率低、精度不高等问题。激光方式则受环境影响很大,成像板长时间使用后会附着灰尘或水滴,影响相机的拍摄,从而影响系统的准确性。
技术实现要素:
3.本发明所要解决的技术问题是提供一种竖井掘进位姿测量装置及方法,能够对竖井掘进机的姿态进行测量。
4.本发明解决其技术问题所采用的技术方案是:提供一种竖井掘进位姿测量装置,包括:
5.绳状物,所述绳状物的一端固定于井口处的井口固定点,另一端分为第一支段、第二支段和第三支段,其中,所述第一支段与掘进机上的第一固定点连接,所述第二支段与掘进机上的第二固定点连接,所述第三支段与掘进机上的第三固定点连接;所述第二固定点和第三固定点与参考点均位于所述掘进机的水平面上,所述参考点为所述井口固定点向所述掘进机的水平面垂直投影的投影点,所述第一固定点位于所述掘进机的水平面下方,并在所述绳状物受力平衡时能够使得所述第一支段与所述掘进机的水平面垂直;
6.测力计,设置在所述第一支段、第二支段和第三支段上;
7.角度传感器,设置在所述掘进机上;
8.计算模块,用于根据所述测力计的检测值计算出所述参考点在掘进机坐标系中的坐标值,再结合所述角度传感器的检测值以及所述参考点在大地坐标系中的坐标值得到所述掘进机的位置和姿态。
9.所述计算模块包括:第一角度计算单元,用于根据所述第二支段和第三支段上的测力计的测量值以及第二支段与第三支段之间的夹角计算出所述绳状物水平方向分力与所述第二支段之间的夹角;第二角度计算单元,用于根据所述第一支段、第二支段和第三支段上的测力计的测量值以及第二支段与第三支段之间的夹角计算出所述绳状物与所述第一支段之间的夹角;掘进机坐标计算单元,用于根据所述绳状物水平方向分力与所述第二支段之间的夹角、所述绳状物与所述第一支段之间的夹角以及所述绳状物的长度计算所述参考点在掘进机坐标系上的坐标值;位姿计算单元,用于根据所述参考点在掘进机坐标系上的坐标值、所述参考点在大地坐标系上的坐标值以及所述角度传感器的检测值计算掘进机的位置和姿态。
10.所述第一角度计算单元通过计算出所述绳状物水平方向分力与所述第二支段之间的夹角,其中,f2为所述第二支段上的测力计的测量值,f3为所述第三支段上的测力计的测量值,β为所述第二支段与第三支段之间的夹角,θ为所述绳状物水平方向分力与所述第二支段之间的夹角。
11.所述第二角度计算单元通过计算出所述绳状物与所述第一支段之间的夹角,其中,f1为所述第一支段上的测力计的测量值,f2为所述第二支段上的测力计的测量值,f3为所述第三支段上的测力计的测量值,β为所述第二支段与第三支段之间的夹角,θ为所述绳状物水平方向分力与所述第二支段之间的夹角,α为所述绳状物与所述第一支段之间的夹角;f4为所述绳状物水平方向分力,f5为所述绳状物所受的力。
12.本发明解决其技术问题所采用的技术方案是:还提供一种竖井掘进位姿测量方法,使用上述的竖井掘进位姿测量装置,包括以下步骤:
13.(1)将所述绳状物的一端固定于井口处的井口固定点,将所述第一支段、第二支段和第三支段分别与所述第一固定点、第二固定点和第三固定点连接,调整所述绳状物拉力使得所述绳状物受力平衡,且所述绳状物的另一端与所述第二固定点和第三固定点位于同一水平面;
14.(2)获取所述第一支段、第二支段、第三支段上测力计以及所述角度传感器的检测值;
15.(3)根据所述测力计的检测值计算出所述参考点在掘进机坐标系中的坐标值,再结合所述角度传感器的检测值以及所述参考点在大地坐标系中的坐标值得到所述掘进机的位置和姿态。
16.所述步骤(3)包括以下子步骤:
17.(31)根据所述第二支段和第三支段上的测力计的测量值以及第二支段与第三支段之间的夹角计算出所述绳状物水平方向分力与所述第二支段之间的夹角;
18.(32)根据所述第一支段、第二支段和第三支段上的测力计的测量值以及第二支段与第三支段之间的夹角计算出所述绳状物与所述第一支段之间的夹角;
19.(33)根据所述绳状物水平方向分力与所述第二支段之间的夹角、所述绳状物与所述第一支段之间的夹角以及所述绳状物的长度计算所述参考点在掘进机坐标系上的坐标值;
20.(34)根据所述参考点在掘进机坐标系上的坐标值、所述参考点在大地坐标系上的坐标值以及所述角度传感器的检测值计算掘进机的位置和姿态。
21.所述步骤(31)中通过计算出所述绳状物水平方向分力与所述第二支段之间的夹角,其中,f2为所述第二支段上的测力计的测量值,f3为所述第三支段上的测力计的测量值,β为所述第二支段与第三支段之间的夹角,θ为所述绳
状物水平方向分力与所述第二支段之间的夹角。
22.所述步骤(32)中通过计算出所述绳状物与所述第一支段之间的夹角,其中,f1为所述第一支段上的测力计的测量值,f2为所述第二支段上的测力计的测量值,f3为所述第三支段上的测力计的测量值,β为所述第二支段与第三支段之间的夹角,θ为所述绳状物水平方向分力与所述第二支段之间的夹角,α为所述绳状物与所述第一支段之间的夹角;f4为所述绳状物水平方向分力,f5为所述绳状物所受的力。
23.有益效果
24.由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明在实施过程中,将绳状物一端与井口固定点相连,绳状物另一端分为三个支段,分别与掘进机上的三个固定点相连,并在三个支段上设置测力计,根据绳状物的受力平衡得到掘进机挖掘面上的点在掘进机坐标系上的坐标值,再根据掘进机挖掘面上的点的大地坐标上的坐标值和掘进机上的角度传感器即可得到掘进机的位置和姿态。由此可见,该方式操作简单,且不受环境限制,使用十分方便。
附图说明
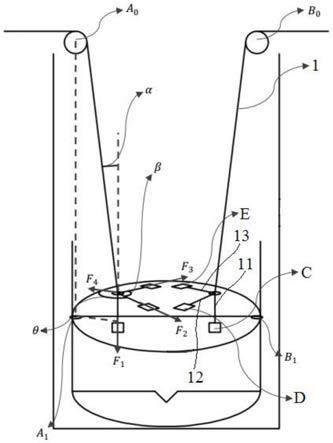
25.图1是本发明的原理示意图。
具体实施方式
26.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
27.本发明的实施方式涉及一种竖井掘进位姿测量装置,如图1所示,包括:
28.绳状物1,所述绳状物1的一端固定于井口处的井口固定点a0,另一端分为第一支段11、第二支段12和第三支段13,其中,所述第一支段11与掘进机上的第一固定点c连接,所述第二支段12与掘进机上的第二固定点d连接,所述第三支段13与掘进机上的第三固定点e连接;所述第二固定点c和第三固定点d与参考点a1均位于所述掘进机的水平面上,所述参考点a1为所述井口固定点a0向所述掘进机的水平面垂直投影的投影点,所述第一固定点c位于所述掘进机的水平面下方,并在所述绳状物受力平衡时能够使得所述第一支段与所述掘进机的水平面垂直。本实施方式中设置有两个井口固定点,另一个井口固定点为b0,该井口固定点为b0对应有参考点b1。
29.测力计,设置在所述第一支段11、第二支段12和第三支段13上,分别用于检测第一支段11、第二支段12和第三支段13的受力值;
30.角度传感器,设置在所述掘进机上;
31.计算模块,用于根据所述测力计的检测值计算出所述参考点a1和参考点b1在掘进机坐标系中的坐标值,再结合所述角度传感器的检测值以及所述参考点a1和参考点b1在大
地坐标系中的坐标值得到所述掘进机的位置和姿态。
32.本实施方式中的计算模块包括:
33.第一角度计算单元,用于根据所述第二支段12和第三支段13上的测力计的测量值以及第二支段12与第三支段13之间的夹角计算出所述绳状物水平方向分力与所述第二支段之间的夹角,即通过计算出所述绳状物水平方向分力与所述第二支段之间的夹角θ,其中,f2为所述第二支段12上的测力计的测量值,f3为所述第三支段13上的测力计的测量值,β为所述第二支段12与第三支段13之间的夹角,由于第一固定点c、第二固定点d和第三固定点e相对于掘进机位置已知,即第一固定点c、第二固定点d和第三固定点e相对掘进机的坐标已知,因此第二支段12和第三支段13之间的夹角β也是已知的,因此上式中只有θ为未知数,因此可以计算得到。
34.第二角度计算单元,用于根据所述第一支段11、第二支段12和第三支段13上的测力计的测量值以及第二支段12与第三支段13之间的夹角计算出所述绳状物与所述第一支段11之间的夹角。所述绳状物所受的力f5被分解为垂直方向的分力和水平方向的分力,由于本实施方式中绳状物受力平衡,因此垂直方向的分力即为所述第一支段11上的测力计的测量值f1,水平方向的分力即为f4,该力与所述第二支段12上的测力计的测量值f2和所述第三支段13上的测力计的测量值f3在f4方向上的分力之和相等,因此可以通过计算出所述绳状物与所述第一支段11之间的夹角α,其中,f1为所述第一支段11上的测力计的测量值,f2为所述第二支段12上的测力计的测量值,f3为所述第三支段13上的测力计的测量值,β为所述第二支段12与第三支段13之间的夹角,θ为所述绳状物水平方向分力与所述第二支段12之间的夹角,f4为所述绳状物水平方向分力。
35.掘进机坐标计算单元,用于根据所述绳状物水平方向分力与所述第二支段12之间的夹角θ、所述绳状物与所述第一支段11之间的夹角α以及所述绳状物的长度计算所述参考点a1和参考点b1在掘进机坐标系上的坐标值,其中,所述绳状物的长度可以通过测量方式得到。
36.位姿计算单元,用于根据所述参考点a1和参考点b1在掘进机坐标系上的坐标值、所述参考点a1和参考点b1在大地坐标系上的坐标值以及所述角度传感器的检测值,通过通过七参数坐标转换计算掘进机的位置和姿态,其中,参考点a1和参考点b1在大地坐标系上的坐标值可以根据井口固定点a0和井口固定点b0的大地坐标系的坐标值以及绳状物的长度以及绳状物与所述第一支段之间的夹角α得到。
37.本发明的实施方式还涉及一种竖井掘进位姿测量方法,使用上述实施方式中的竖井掘进位姿测量装置,本实施方式中采用的绳状物为钢丝绳,包括以下步骤:
38.(1)将钢丝绳的一端固定于井口处的井口固定点a0,将钢丝绳另一端的第一支段11、第二支段12和第三支段13分别与掘进机上的第一固定点c、第二固定点d和第三固定点e连接,调整钢丝绳的拉力使得钢丝绳受力平衡,且钢丝绳的另一端(即第一支段11、第二支
段12和第三支段13的共同端点)与所述第二固定点d和第三固定点e位于同一水平面。
39.(2)获取所述第一支段11、第二支段12、第三支段13上测力计以及所述角度传感器的检测值,同时可以测量钢丝绳的长度。
40.(3)根据所述第二支段12和第三支段13上的测力计的测量值以及第二支段12与第三支段13之间的夹角β计算出所述绳状物水平方向分力f4与所述第二支段12之间的夹角θ。
41.(4)根据所述第一支段11、第二支段12和第三支段13上的测力计的测量值以及第二支段12与第三支段13之间的夹角β计算出所述绳状物与所述第一支段11之间的夹角α。
42.(5)根据所述绳状物水平方向分力f4与所述第二支段12之间的夹角θ、所述绳状物与所述第一支段11之间的夹角α以及所述绳状物的长度计算所述参考点a1在掘进机坐标系上的坐标值。
43.(6)采用上述相同的方法计算出所述参考点b1在掘进机坐标系上的坐标值。
44.(7)根据所述参考点a1和参考点b1在掘进机坐标系上的坐标值、所述所述参考点a1和参考点b1在大地坐标系上的坐标值以及所述角度传感器的检测值,通过七参数坐标转换计算掘进机的位置和姿态。
45.不难发现,本发明在实施过程中,将绳状物一端与井口固定点相连,绳状物另一端分为三个支段,分别与掘进机上的三个固定点相连,并在三个支段上设置测力计,根据绳状物的受力平衡得到掘进机挖掘面上的点在掘进机坐标系上的坐标值,再根据掘进机挖掘面上的点的大地坐标上的坐标值和掘进机上的角度传感器即可得到掘进机的位置和姿态。由此可见,该方式操作简单,且不受环境限制,使用十分方便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1