一种基于电池电量的机器人指令分配方法与流程
1.本发明涉及机器人控制技术领域,尤其涉及一种基于电池电量的机器人指令分配方法。
背景技术:
2.移动机器人是自动执行所需工作的一类机械装置,由执行机构、驱动装置、检测装置和控制系统等组成。它既可以接受人类的指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类的工作,例如生产业、建筑业或是高压用电环境等危险区域的工作。
3.有资料显示,如今通用的机器人指令下达方式为先选定机器人,然后对该机器人下达工作指令,该机器人根据工作指令开始工作,但是由于各个工作指令内容的不同导致各个工作指令耗电量不同,这种指令下达方法容易导致工作指令与机器人剩余电量分配不均,导致机器人电量不足以完成工作指令或电量过多。
4.国专利文献cn109687557a公开了一种“机器人电量管理方法及装置、机器人”。方法包括监测机器人当前电量;以及如果所述当前电量低于最低回充电量阈值,则生成回充指令。本技术解决了机器人电量无法持续维持运行的技术问题。通过本技术可以开启或者关闭自动回充的电量管理功能,同时通过设置机器人运行的最低电量和机器人离开充电桩的最低电量,配合电量管理实现对所述机器人电量的管理策略。上述技术方案未对工作指令下达方法进行优化,容易导致工作指令与机器人剩余电量分配不均。
技术实现要素:
5.本发明主要解决原有的技术方案未对工作指令下达方法进行优化,导致工作指令与机器人剩余电量分配不均的技术问题,提供一种基于电池电量的机器人指令分配方法,通过采集机器人工作历史数据构建指令与用电量对照关系,采用控制中心实现对机器人的监控及工作指令下达,通过对机器人电池剩余电量、指令完成时间及指令完成便利性三次可行性判断进行工作指令分配,实现工作指令与机器人剩余电量的均匀分配,提高工作指令完成效率。
6.本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括以下步骤:
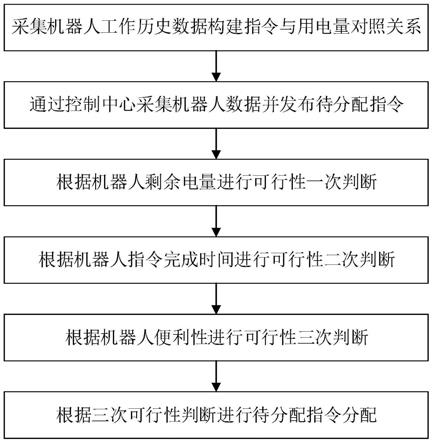
7.s1采集机器人工作历史数据构建指令与用电量对照关系;
8.s2通过控制中心采集机器人数据并发布待分配指令;
9.s3根据机器人剩余电量进行可行性一次判断;
10.s4根据机器人指令完成时间进行可行性二次判断;
11.s5根据机器人便利性进行可行性三次判断;
12.s6根据三次可行性判断进行待分配指令分配。
13.作为优选,所述的步骤s1采集机器人工作历史数据包括采集机器人动作i
n
和机器
人进行动作i
n
前后的电池电量变化量δd
n
,若电池电量变化量δd
n
变化时机器人进行单一非连续性动作,则判定动作i
n
用电量为d
n
;若电池电量变化量δd
n
变化时机器人进行单一连续性动作,则将连续性动作按照单一时间周期为单位分割实现该动作单一时间周期用电量判定;若电池电量变化量δd
n
变化时机器人同时进行多个动作,结合已知单一动作用电量进行分解实现未知单一动作用电量判定。
14.作为优选,所述的步骤s1构建指令与用电量对照关系包括:首先对指令进行分解,将指令分解为若干单一动作,将非连续性动作的用电量进行相加,将连续性动作的单一时间周期用电量与所用时间周期相乘,汇总得到指令总电量d
jn
,从而构建指令与用电量对照关系。
15.作为优选,所述的步骤s2通过控制中心采集的机器人数据包括机器人电池电量、机器人待完成指令以及机器人工作位置。采集机器人电池电量和机器人待完成指令用于判断机器人在完成待完成指令后电池剩余电量是否足以完成待分配指令并返回充电,同时采集机器人待完成指令还能知道机器人完成待完成指令后所在位置,结合机器人工作位置用于判断如果机器人完成待分配指令总体所用时间。
16.作为优选,所述的步骤s3根据机器人剩余电量进行可行性一次判断具体包括:
17.s3.1进行指令用电量d
jn
计算及电池剩余电量d
剩
检测;
18.s3.2结合保底电量d0进行指令可行性一次判定;
19.s3.3若判定成功,则继续下一阶段可行性二次判定,若判定失败,则排除该机器人分配资格。
20.作为优选,所述的步骤s3.2中保底电量d0为机器人从所有指令执行完毕后位置回到充电端进行充电所需电量,包括机器人位移至充电位置所需电量和开始充电动作所需电量,所述保底电量d0大小随指令内容变化。
21.作为优选,所述的步骤s3.2具体包括将电池的剩余电量d
剩
减去所有待完成指令和待分配指令后的剩余电量与保底电量d0比较,若剩余电量>保底电量d0,则一次判定成功,若剩余电量≤保底电量d0,则一次判定失败。
22.作为优选,所述的步骤s4根据机器人指令完成时间进行可行性二次判断具体包括:采集可行性一次判定成功的机器人的待完成指令,并根据完成待完成指令所需时间长短顺序进行排序获得指令完成时间排序。
23.作为优选,所述的步骤s5根据机器人便利性进行可行性三次判断具体包括:采集可行性一次判定成功的机器人的待完成指令,然后采集机器人完成所有待完成指令后的最终位置,并根据机器人从最终位置开始完成待分配指令所需时间长短顺序进行排序获得便利性排序。
24.作为优选,所述的步骤s6将指令完成时间排序和便利性排序汇总,将待分配指令分配给完成待完成指令所需时间和完成待分配指令所需时间之和最短的机器人。完成待完成指令所需时间和完成待分配指令所需时间之和最短即最快完成待分配指令,提高机器人的指令完成效率。
25.本发明的有益效果是:通过采集机器人工作历史数据构建指令与用电量对照关系,采用控制中心实现对机器人的监控及工作指令下达,通过对机器人电池剩余电量、指令完成时间及指令完成便利性三次可行性判断进行工作指令分配,实现工作指令与机器人剩
余电量的均匀分配,提高工作指令完成效率。
附图说明
26.图1是本发明的一种流程图。
具体实施方式
27.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。实施例:本实施例的一种基于电池电量的机器人指令分配方法,如图1所示,包括以下步骤:
28.s1采集机器人工作历史数据构建指令与用电量对照关系。
29.采集机器人工作历史数据包括采集机器人动作i
n
和机器人进行动作i
n
前后的电池电量变化量δd
n
,若电池电量变化量δd
n
变化时机器人进行单一非连续性动作,则判定动作i
n
用电量为d
n
;若电池电量变化量δd
n
变化时机器人进行单一连续性动作,则将连续性动作按照单一时间周期为单位分割实现该动作单一时间周期用电量判定;若电池电量变化量δd
n
变化时机器人同时进行多个动作,结合已知单一动作用电量进行分解实现未知单一动作用电量判定。
30.构建指令与用电量对照关系包括:首先对指令进行分解,将指令分解为若干单一动作,将非连续性动作的用电量进行相加,将连续性动作的单一时间周期用电量与所用时间周期相乘,汇总得到指令总电量d
jn
,从而构建指令与用电量对照关系。
31.s2通过控制中心采集机器人数据并发布待分配指令,通过控制中心采集的机器人数据包括机器人电池电量、机器人待完成指令以及机器人工作位置。采集机器人电池电量和机器人待完成指令用于判断机器人在完成待完成指令后电池剩余电量是否足以完成待分配指令并返回充电,同时采集机器人待完成指令还能知道机器人完成待完成指令后所在位置,结合机器人工作位置用于判断如果机器人完成待分配指令总体所用时间。
32.s3根据机器人剩余电量进行可行性一次判断,具体包括:
33.s3.1进行指令用电量d
jn
计算及电池剩余电量d
剩
检测;
34.s3.2结合保底电量d0进行指令可行性一次判定,具体包括将电池的剩余电量d
剩
减去所有待完成指令和待分配指令后的剩余电量与保底电量d0比较,若剩余电量>保底电量d0,则一次判定成功,若剩余电量≤保底电量d0,则一次判定失败。
35.保底电量d0为机器人从所有指令执行完毕后位置回到充电端进行充电所需电量,包括机器人位移至充电位置所需电量和开始充电动作所需电量,所述保底电量d0大小随指令内容变化。
36.s3.3若判定成功,则继续下一阶段可行性二次判定,若判定失败,则排除该机器人分配资格。
37.s4根据机器人指令完成时间进行可行性二次判断,具体包括:采集可行性一次判定成功的机器人的待完成指令,并根据完成待完成指令所需时间长短顺序进行排序获得指令完成时间排序。
38.s5根据机器人便利性进行可行性三次判断,具体包括:采集可行性一次判定成功的机器人的待完成指令,然后采集机器人完成所有待完成指令后的最终位置,并根据机器人从最终位置开始完成待分配指令所需时间长短顺序进行排序获得便利性排序。
39.s6根据三次可行性判断进行待分配指令分配,将指令完成时间排序和便利性排序汇总,将待分配指令分配给完成待完成指令所需时间和完成待分配指令所需时间之和最短的机器人。完成待完成指令所需时间和完成待分配指令所需时间之和最短即最快完成待分配指令,提高机器人的指令完成效率。
40.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
41.尽管本文较多地使用了可行性一次判断、便利性等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1