一种幕墙缺陷检测、定位及统计方法
1.本发明主要涉及建筑外墙机器人的技术领域,具体涉及一种幕墙缺陷检测、定位及统计方法。
背景技术:
2.随着经济的发展,当下的高层建筑已经在全国各大城市铺展开来,高层建筑所带来的高空安全隐患也逐渐成为急需解决的问题。这其中蕴含的安全问题中,玻璃幕墙所产生的隐患无疑是重中之重。
3.根据申请号为cn202010247570.6的专利文献所提供的一种幕墙质量缺陷检测系统及方法可知,该产品包括下述步骤:步骤一:通过采集模块采集与幕墙相关的幕墙影像信息、幕墙含水量数据、幕墙种类数据和幕墙使用时间数据,同时采集与环境相关的天气信息、温度数据、风力强度数据和空气湿度数据,并将其传输至整理模块;步骤二:通过整理模块将与幕墙相关的幕墙影像信息、幕墙含水量数据和幕墙种类数据进行整理分类,该幕墙质量缺陷检测系统及方法通过分析模块的设置,对幕墙信息和环境数据进行分析,计算出各类天气占比数据、幕墙影像体积、幕墙残缺占比以及幕墙信息和环境数据内各类数据的均值,增加对数据的精确分析,从而提高数据的说服力,节省人为分析的时间,提高工作效率。
4.但是现如今的幕墙缺陷检测机器人,在检测出问题后,对数据的采集不足,难以为后续的统计以及维修工作提供帮助,也难以将损伤种类,损伤位置以一种比较直观的形式为相关从业人员或者业主呈现出来,亟需一套解决方法将机器人的检测环节和定位、后续的统计以及维修环节有机联系起来从而形成完整的闭环,并且根据收集到的数据,基于一定的计算方法综合考虑经济成本以及安全性来制定出最佳的修护方案。
技术实现要素:
5.本发明主要提供了一种幕墙缺陷检测、定位及统计方法用以解决上述背景技术中提出的技术问题。
6.本发明解决上述技术问题采用的技术方案为:
7.一种幕墙缺陷检测方法,包括以下步骤:
8.步骤s10,按照预设路线引导幕墙机器人在幕墙壁面上行走,以通过幕墙机器人对幕墙壁面上的缺陷进行采集,得到幕墙缺陷信息;
9.步骤s20,根据往期所述幕墙缺陷信息建立自建缺陷类型数据库,并将步骤s10得到的幕墙缺陷信息与所述自建缺陷类型数据库通过ai图像识图算法进行比对,得到缺陷类型信息;
10.步骤s30,将步骤s10得到的幕墙缺陷信息加入到步骤s20得到的自建缺陷类型数据库。
11.进一步的,所述自建缺陷类型数据库包括:
12.缺陷类型磁帖,用于存储工人归纳的幕墙缺陷类型;
13.幕墙缺陷磁帖,用于将往期所述幕墙缺陷信息存储至缺陷类型磁帖中进行分类,且供ai图像识图算法比对往期所述幕墙缺陷信息以及步骤s10得到的幕墙缺陷信息;
14.不明异常缺陷磁帖,用于存储第二步中ai图像识图算法无法识别的幕墙缺陷,以供后续人工比对。
15.进一步的,所述幕墙机器人包括移动车架,固定于所述移动车架上表面的卷扬机,与所述卷扬机执行端相连接的机架;
16.所述机架靠近幕墙壁面的一侧顶端固定有标记喷涂组件、底端固定有检测组件;
17.所述检测组件包括固定于所述机架底端的污渍传感器、红外线距离传感器以及摄像头,使得幕墙机器人通过型号为gfw15x的污渍传感器对幕墙表面的污渍进行检测,通过型号为ly
‑
lds
‑
0060红外线距离传感器记录高度数据,通过摄像头对幕墙壁面的缺陷处进行拍照,以供ai图像识图算法进行比对识别。
18.进一步的,所述标记喷涂组件包括通过轴承座与所述机架的一侧表面转动连接的丝杆,套设于所述丝杆的外周边且通过丝母与所述丝杆相连接的平移块,以及固定于所述平移块远离机架的一侧表面的喷头,从而带动喷头进行平移,以使喷头快速挪动至待喷涂区域进行喷涂工作。
19.根据以上的一种幕墙缺陷检测方法的技术方案,还将提供一种幕墙缺陷定位方法,包括以下步骤:
20.步骤s40,设置幕墙缺陷标记图案,所述幕墙缺陷标记图案为工人根据所述缺陷类型信息绘制的指向型图形;
21.步骤s50,通过幕墙机器人在幕墙壁面上的移动,以使幕墙机器人的喷头在壁面上绘制所述幕墙缺陷标记图案。
22.进一步的,所述步骤s40中,所述喷头根据幕墙缺陷标记图案使用不同颜色的lcl乳胶漆,由于lcl乳胶漆不易溶于水,且在潮湿环境能保持较好地粘附性,且lcl乳胶漆可被溶剂溶解,从而在后续清洗过程中,该标记可被该溶剂洗去。
23.进一步的,所述步骤s50中,在工人维修后,通过幕墙机器人对幕墙缺陷标记图案进行清洗。
24.根据以上的一种幕墙缺陷检测、定位方法的技术方案,还将提供一种幕墙缺陷统计方法,包括以下步骤:
25.步骤s60,对缺陷类型信息进行统计、分析、解读,得到缺陷位置、缺陷数量和缺陷危险性;
26.步骤s70,根据所述缺陷位置和缺陷危险性,得出工人维修时的缺陷维修危险性。
27.进一步的,所述步骤s60中,还包括根据缺陷位置、缺陷数量和缺陷危险性生成相应的表格;
28.所述步骤s60中,还包括将相应的表格发送至服务器中进行储存,且通过服务器将相应的表格发送至app中。
29.与现有技术相比,本发明的有益效果为:
30.其一,由于外墙缺陷检测机器人、外墙喷涂机器人等技术的应用,使得相关从业人员或者业主能够对建筑幕墙的缺陷的位置、种类、危险程度有直观的认识,方便针对缺陷位
置、种类、危险程度制订相应的维修计划;
31.其二,本发明方案提供一套解决方法,将幕墙机器人的检测环节和定位、后续的统计以及维修环节有机联系起来从而形成完整的闭环,进而建立一套合理的、完整的玻璃幕墙安全维护机制,具有高效性、准确性、经济性。
32.以下将结合附图与具体的实施例对本发明进行详细的解释说明。
附图说明
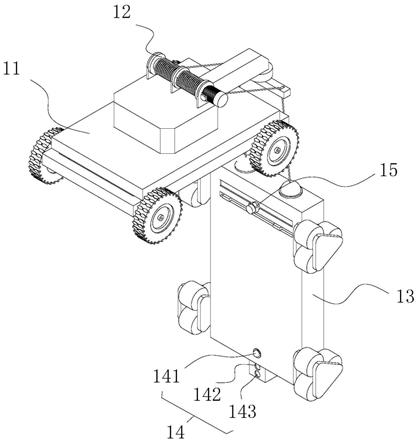
33.图1为本发明幕墙机器人的结构示意图;
34.图2为本发明幕墙机器人的轴测图;
35.图3为本发明标记喷涂组的结构示意图;
36.图4为本发明的流程图;
37.图5为本发明多种幕墙缺陷标记图案。
38.图中:10、幕墙机器人;11、移动车架;12、卷扬机;121、卷扬机转轮;122、卷扬机支撑架;123、卷扬机限位杆;13、机架;14、检测组件;141、摄像头;142、污渍传感器;143、红外线距离传感器;15、标记喷涂组件;151、丝杆;152、喷头;153、平移块。
具体实施方式
39.为了便于理解本发明,下面将参照相关附图对本发明进行更加全面的描述,附图中给出了本发明的若干实施例,但是本发明可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本发明公开的内容更加透彻全面。
40.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
41.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常连接的含义相同,本文中在本发明的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
42.实施例,请参照附图1
‑
5,在本发明一优选的实施例中,一种幕墙缺陷检测方法,包括以下步骤:
43.步骤s10,按照预设路线引导幕墙机器人10在幕墙壁面上行走,以通过幕墙机器人10对幕墙壁面上的缺陷进行采集,得到幕墙缺陷信息;
44.步骤s20,根据往期所述幕墙缺陷信息建立自建缺陷类型数据库,并将步骤s10得到的幕墙缺陷信息与所述自建缺陷类型数据库通过ai图像识图算法进行比对,得到缺陷类型信息;
45.步骤s30,将步骤s10得到的幕墙缺陷信息加入到步骤s20得到的自建缺陷类型数据库。
46.进一步的,该数据采集的方法具有多样性,通过搭载了一定的计算机视觉技术的无人机完成该项搜集数据的任务,并精准的报告缺陷,在提高效率的同时,降低了危险性,
也削减了人力成本。
47.进一步的,所述自建缺陷类型数据库包括:
48.缺陷类型磁帖,用于存储工人归纳的幕墙缺陷类型;
49.幕墙缺陷磁帖,用于将往期所述幕墙缺陷信息存储至缺陷类型磁帖中进行分类,且供ai图像识图算法比对往期所述幕墙缺陷信息以及步骤s10得到的幕墙缺陷信息;
50.不明异常缺陷磁帖,用于存储第二步中ai图像识图算法无法识别的幕墙缺陷,以供后续人工比对。
51.进一步的,所述幕墙机器人10包括移动车架11,固定于所述移动车架11上表面的卷扬机12,与所述卷扬机12执行端相连接的机架13;
52.所述机架13靠近幕墙壁面的一侧顶端固定有标记喷涂组件15、底端固定有检测组件14;
53.所述检测组件14包括固定于所述机架13底端的污渍传感器142、红外线距离传感器143以及摄像头141;
54.需要说明的是,在本实施例中,使得幕墙机器人10通过型号为gfw15x的污渍传感器142对幕墙表面的污渍进行检测,通过型号为ly
‑
lds
‑
0060红外线距离传感器143记录高度数据,通过摄像头141对幕墙壁面的缺陷处进行拍照,以供ai图像识图算法进行比对识别;
55.通过放置在建筑屋顶的移动车架11挪动卷扬机12,由于卷扬机12通过钢丝绳与机架13相连接,且检测组件14固定在机架13上,从而带动检测组件14移动至幕墙壁面的任意位置。
56.进一步的,所述标记喷涂组件15包括通过轴承座与所述机架13的一侧表面转动连接的丝杆151,套设于所述丝杆151的外周边且通过丝母与所述丝杆151相连接的平移块153,以及固定于所述平移块153远离机架13的一侧表面的喷头152;
57.需要说明的是,在本实施例中,由于喷头152通过丝母与丝杆151相连接,使得丝杆151进行旋转时,喷头152将丝杆151的回转运动转变为自身的直线运动,从而带动喷头152进行平移,以使喷头152快速挪动至待喷涂区域进行喷涂工作。
58.如图1
‑
5所示,根据上述实施例还将提供一种幕墙缺陷定位方法,包括以下步骤:
59.步骤s40,设置幕墙缺陷标记图案,所述幕墙缺陷标记图案为工人根据所述缺陷类型信息绘制的指向型图形;
60.步骤s50,通过幕墙机器人10在幕墙壁面上的移动,以使幕墙机器人10的喷头152在壁面上绘制所述幕墙缺陷标记图案;
61.需要说明的是,在本实施例中,幕墙缺陷标记图案如图5所示。
62.进一步的,所述步骤s40中,所述喷头152根据幕墙缺陷标记图案使用不同颜色的lcl乳胶漆;
63.需要说明的是,在本实施例中,由于lcl乳胶漆不易溶于水,且在潮湿环境能保持较好地粘附性,且lcl乳胶漆可被溶剂溶解,从而在后续清洗过程中,该标记可被该溶剂洗去。
64.进一步的,所述步骤s50中,在工人维修后,通过幕墙机器人10对幕墙缺陷标记图案进行清洗。
65.如图1
‑
5所示,根据上述实施例还将提供一种幕墙缺陷统计方法,包括以下步骤:
66.步骤s60,对缺陷类型信息进行统计、分析、解读,得到缺陷位置、缺陷数量和缺陷危险性;
67.步骤s70,根据所述缺陷位置和缺陷危险性,得出工人维修时的缺陷维修危险性。
68.进一步的,所述步骤s60中,还包括根据缺陷位置、缺陷数量和缺陷危险性生成相应的表格。
69.进一步的,所述步骤s60中,还包括将相应的表格发送至服务器中进行储存,且通过服务器将相应的表格发送至app中。
70.本发明的具体操作方式如下:
71.需要对幕墙缺陷进行检测时,首先按照预设路线引导幕墙机器人10在幕墙壁面上行走,以通过幕墙机器人10对幕墙壁面上的缺陷进行采集,得到幕墙缺陷信息,再根据往期幕墙缺陷信息建立自建缺陷类型数据库,并将步骤s10得到的幕墙缺陷信息与自建缺陷类型数据库通过ai图像识图算法进行比对,得到缺陷类型信息;然后将步骤s10得到的幕墙缺陷信息加入到步骤s20得到的自建缺陷类型数据库;
72.需要对幕墙缺陷进行定位时,首先设置幕墙缺陷标记图案,再通过幕墙机器人10在幕墙壁面上的移动,以使幕墙机器人10的喷头152在壁面上绘制幕墙缺陷标记图案;
73.需要对幕墙缺陷进行统计时,首先对缺陷类型信息进行统计、分析、解读,得到缺陷位置、缺陷数量和缺陷危险性,再根据缺陷位置和缺陷危险性,得出工人维修时的缺陷维修危险性。
74.上述结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的这种非实质改进,或未经改进将本发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1