一种柔性多维力传感器、制备方法及其应用
1.本发明属于柔性电子领域,更具体地,涉及一种柔性多维力传感器、制备方法及其应用。
背景技术:
2.随着科技与社会的不断发展,机器人的应用领域得到极大的扩展,包括科研、工业自动化、医疗、信息安全、家庭服务等。机器人传感系统是实现机器人与外界进行信息交换的主要窗口,强大的传感系统将帮助机器人更好地实现环境感知与人机交互。机器人电子皮肤作为一种重要的机器人传感手段,在机器人传感系统中占有非常大的比例。总体来说,电子皮肤是一种利用传感技术、微机电技术和新材料技术,能够模仿生物皮肤感知、调节、保护等功能的电子装置或系统,它本质上是一个或多个传感器,通过电子系统重塑人体皮肤的属性。
3.传统的机器人电子皮肤通常需要额外的电源供应,这就造就了相应的成本与空间问题。近年来随着自驱动传感技术的发展,例如压电、摩擦发电等技术越来越多地在机器人电子皮肤上得到应用,这类电子皮肤无需额外能源供应,在传感过程中就能够产生能源,提供足够的工作能量。
4.目前受限于电子皮肤的传感原理,机器人力学电子皮肤的研究多集中于单一方向作用力的传感,而对于日常生活中常见的多维力缺乏传感能力。
5.另外,近10年来,随着支撑技术的不断发展,机器人电子皮肤的柔性、可拉伸性、压力灵敏度、规模尺寸和空间分辨率等性能取得了快速发展和突破。但是柔性电子技术是硬质电子技术的继承与发展,因此也大量采用了传统的半导体工艺,但是一些柔性材料对传统工艺的适应性并不好,所以改进柔性材料的制造工艺十分必要,以实现在很大程度上提升传感器的灵敏度与制造成功率。
技术实现要素:
6.针对现有技术的以上缺陷或改进需求,本发明提供了一种柔性多维力传感器、制备方法及其应用,其目的在于通过结构的改进,利用摩擦发电的传感原理实现机器人电子皮肤传感器传感三维力的功能。同时通过合理的材料选择与工艺设计,使柔性三维力传感器具备良好的可拉伸与传感灵敏度。
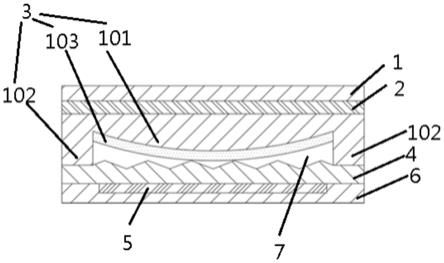
7.为实现上述目的,按照本发明的一个方面,提供了一种柔性多维力传感器,包括自上而下设置的封装层、屏蔽层、曲面结构层、摩擦层、电极层和基底层;
8.所述曲面结构层包括设置在中央的柔性曲面结构部、围绕该柔性曲面结构部设置的柔性支撑部和涂覆于柔性曲面结构部凸起表面上的感应电极;所述柔性支撑部与摩擦层连接,该柔性支撑部的高度满足使得所述柔性曲面结构部的凸起最大处与所述摩擦层相切;所述柔性支撑部、柔性曲面结构部与摩擦层之间围成空腔;
9.所述电极层包括至少2个间隔设置的扇形电极,该些至少2个扇形电极构成的图形
与所述柔性曲面结构部的投影大小相同。
10.优选地,所述柔性曲面结构部为以垂直于球体直径的方向截取的部分球体,该截取的部分球体不超过整个球体的一半。
11.优选地,所述整个球体的半径为10.6
‑
50.7毫米。
12.优选地,所述至少2个扇形电极为至少2个全等对称设置的扇形电极。
13.优选地,所述柔性多维力传感器的厚度为1200微米
‑
2000微米。
14.优选地,所述柔性曲面结构部、所述柔性支撑部、所述摩擦层、所述封装层、所述基底层的材料为pdms、eco
‑
flex、tpu、poe、eva或epdm。
15.优选地,所述摩擦层的表面粗糙结构由p600
‑
p1500的砂纸倒模得到。
16.优选地,所述电极层和所述感应电极的材料为银纳米线、铜、金或导电水凝胶。
17.按照本发明的另一方面,提供了一种柔性多维力传感器的制备方法,所述方法包括:
18.采用倒模技术得到曲面结构层中的柔性曲面结构部和柔性支撑部,在柔性曲面结构部和柔性支撑部上喷涂屏蔽层,待屏蔽层固化后,在屏蔽层表面旋涂封装层;采用掩膜技术在柔性曲面结构部的凸起表面溅射感应电极;在一基板上旋涂摩擦层并固化,采用掩膜技术在摩擦层上喷涂或溅射电极层,在电极层上旋涂基底层后,将摩擦层、电极层和基底层从基板上剥离;将所述柔性支撑部与摩擦层表面进行粘接,得到所述传感器。
19.优选地,所述在一基板上旋涂摩擦层并固化具体包括:在基板上贴附砂纸后,再在该砂纸上旋涂摩擦层并固化;所述采用倒模技术得到曲面结构层中的柔性曲面结构部和柔性支撑部具体包括,采用柔性曲面结构部的粗糙度为ra1.6
‑
6.4的模具,采用倒模技术得到曲面结构层中的柔性曲面结构部和柔性支撑部。
20.优选地,所述模具为硬质耐热材料。
21.优选地,所述摩擦层、电极层和基底层的制备还可以为在基板上贴附掩模版,通过喷涂或溅射工艺制备图案化的电极层。在电极层表面旋涂基底层,将基底层从基板上揭下,电极层此时会从基板上转移到基底层中。再将基底层顶面贴附于另一片基板上,在其裸露电极的那一面旋涂摩擦层材料,并使其固化,然后将摩擦层、电极层和基底层从基板上剥离;将所述柔性支撑部与摩擦层表面进行粘接,得到所述传感器。此时电极材料优选银纳米线。
22.按照本发明的再一方面,提供了一种柔性多维力传感器的应用,用于机器人电子皮肤领域。
23.总体而言,通过本发明所构思的以上技术方案与现有技术相比,至少能够取得下列有益效果。
24.(1)本发明中利用曲面结构层中的柔性支撑部与摩擦层连接,构成一个可形变空间,设置在该可形变空间中的柔性曲面结构部在没有受到外力作用时,柔性曲面结构部的凸起最大处与摩擦层相切。在受到垂直于摩擦层的外力时,柔性支撑部和柔性曲面结构部会被压缩,在受到分力平行于摩擦层的外力时,柔性曲面结构部会产生平移,柔性支撑部会产生形变。
25.具体地,参见图4中(i)
‑
(iv),当传感器表面受到多维力作用时,其垂直于摩擦层的压力分量使得柔性曲面结构部与摩擦层表面产生接触。由于涂覆于柔性曲面结构部凸起
表面上的感应电极与摩擦层材料得失电子能力的不同,它们在接触时会交换等量异号的电荷。垂直于摩擦层的压力分量使得柔性曲面结构部与摩擦层的接触面积发生改变,根据赫兹接触理论,当施加的压力越大,接触面积越大,两个电极上感应出的整体电荷越多,各个电极就会输出更大的电信号。因此垂直于摩擦层的压力分量越大,不同电极输出的同一性更好。
26.而平行于摩擦层的剪切力分量,使得柔性曲面结构部会相对于摩擦层产生平移,柔性支撑部会产生形变。因此,其柔性曲面结构部与至少两个扇形电极的接触位置发生改变,不同电极根据接触位置的差异感应出不同大小的电荷,输出不同的电信号。因此剪切力分量越大,不同电极之间的输出电压差异性更大。
27.通过对各个扇形电极输出电信号的分析,对不同扇形电极的输出判定生成经验曲线可对多维力进行解耦与传感。
28.(2)传感器整体具有良好的柔性与拉伸性,使得传感器与机器人表面紧密贴合并能保持共性接触,最大限度的减小了传感器与机器人表面的空隙,可对机器人状态进行精确传感。另外,传感器基于摩擦发电的原理,具有自驱动特性,无需外加电源,节省了成本与空间,简化了布线。
29.(3)本发明中柔性多维力传感器的厚度为1200微米
‑
2000微米,能够实现将其应用到机器人电子皮肤领域,由于其厚度很薄,不受体积的影响,可设置在机器人身上任意位置处。
30.(4)传感器以柔性材料为基础材料,通过溅射、喷涂等工艺在其表面修饰柔性可拉伸导电薄膜,材料清洁无毒,既避免了对环境的污染,又保证了生产人员和使用者的安全。
31.(5)本发明提供的制备方法具有高度灵活性,采用模具来制备曲面结构层,易于批量加工,具有较高的制造成功率和质量。
附图说明
32.图1是本发明优选实施例提供的柔性多维力传感器的结构示意图;
33.图2中(a)
‑
(d)是本发明优选实施例提供的柔性多维力传感器中封装层、屏蔽层、曲面结构层的制备示意图;
34.图3中(a)
‑
(d)是本发明优选实施例提供的柔性多维力传感器中摩擦层、电极层、基底层的制备示意图;
35.图4中(i)
‑
(iv)是本发明优选实施例提供的柔性多维力传感器的工作原理示意图。
36.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
[0037]1‑
封装层;2
‑
屏蔽层;3
‑
曲面结构层;4
‑
摩擦层;5
‑
电极层;6
‑
基底层;7
‑
空腔;8
‑
铝模板;9
‑
银纳米线
‑
异丙醇溶液;10
‑
聚酰亚胺薄膜胶带掩膜版;11
‑
铜;12
‑
砂纸;13
‑
不锈钢掩模版;
[0038]
101
‑
柔性曲面结构部;102
‑
柔性支撑部;103
‑
感应电极。
具体实施方式
[0039]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0040]
实施例1
[0041]
本实施例提供了一种柔性多维力传感器的制备方法,及通过该方法制备得到的柔性多维力传感器。参见图2中(a)
‑
(d)和图3中(a)
‑
(d)所示,该制备方法具体包括以下步骤:
[0042]
a采用数控铣的方法对3毫米厚铝板进行机加工,在其表面加工出曲面凹槽图案,得到铝模板8。铝模板结构如图2中(a)所示,其整体尺寸为20
×
20
×
3毫米,中间凹槽深度a=0.5毫米,球形凹槽半径b=20.5毫米,所截圆面半径4.5毫米,加工倒圆1毫米,表面粗糙度要求ra3.2。
[0043]
b依次采用丙酮、乙醇和去离子水对加工完成的铝模板进行清洗,之后用氮气吹干。其中清洗过程均在超声波清洗机中完成,把铝模板放入蒸发皿中,分次倒入丙酮、乙醇、去离子水至没过铝模板1厘米,每次清洗5分钟,超声强度100。
[0044]
c利用sylgard 184聚二甲基硅氧烷,其中,预聚体与固化剂的质量比可以为10:1,将所述预聚体和固化剂混合均匀搅拌5
‑
8分钟,置于真空箱抽真空,静置30分钟,所述真空箱的气压为0
‑
0.1个大气压,得到无气泡且混合均匀的聚二甲基硅氧烷。
[0045]
d将静置后聚二甲基硅氧烷倒在铝模板上,放入匀胶机平台上进行旋涂,匀胶机设置为单步旋涂模式,选取转速200转/分钟,旋涂时间60秒。待旋涂完毕后,将带有聚二甲基硅氧烷的铝模板在常温下静置1
‑
2分钟后,放在加热台上进行加热,温度设置为90摄氏度,固化时间1小时。
[0046]
e用喷枪在步骤d得到的聚二甲基硅氧烷表面进行屏蔽层的喷涂,喷涂材料选用20mg/ml的银纳米线
‑
异丙醇溶液9,银纳米线直径为90纳米。之后在加热板上进行加热,使得异丙醇完全挥发,加热板温度设置为60摄氏度,加热时长1小时。
[0047]
f将导电胶布剪成小条,并用导电膏将导电胶布与步骤e得到的屏蔽层相连。
[0048]
g在步骤f所得到的表面旋涂聚二甲基硅氧烷,旋涂过程在匀胶机里完成,设置转速300转/分钟,旋涂时间60秒,之后将铝模板放在加热台上加热,设置加热台温度90摄氏度,加热时长1小时,聚二甲基硅氧烷固化成膜。将所得结构从铝模板上进行剥离,切除周围薄层废料,得到上层毛坯结构。
[0049]
h将聚酰亚胺薄膜胶带贴在亚克力板上,其中聚酰亚胺薄膜胶带的厚度为100微米,亚克力板厚度为2毫米。用激光切割机对此进行切割,设置激光切割机的切割功率为65w,速度为100%。切割图案化掩膜,掩膜图案为一个中间带有半径4.5毫米中心孔的11
×
11毫米的正方形。
[0050]
i用镊子从亚克力板上撕下聚酰亚胺掩膜胶带10,将掩膜按照图形贴在步骤g所得到的上层毛坯背面,然后把它们放在磁控溅射腔体内进行溅射铜11,设置氩气气体流量40标准毫升/分钟,溅射功率70w,溅射时长1h,在上层球面所镀铜膜厚度约为100nm。取出后完成传感器上层制备,所得上层结构厚度为1000微米。
[0051]
j用3m胶带将目数为p1500的砂纸贴附在载玻片表面,用剪刀将边缘修建干净,之后用气枪对砂纸12表面进行吹气。
[0052]
k在砂纸上旋涂聚二甲基硅氧烷,旋涂过程在匀胶机里完成,设置转速300转/分
钟,旋涂时间60秒,之后将铝模板放在加热台上加热,设置加热台温度90摄氏度,加热时长1小时,聚二甲基硅氧烷固化成膜。
[0053]
l将图3中(b)所示的掩模版13贴附在步骤k得到的聚二甲基硅氧烷表面,给喷枪连接气泵后,用喷枪对硅晶圆进行柔性电极的喷涂,喷涂电极选用的是浓度为20毫克/毫升的银纳米线
‑
异丙醇溶液,银纳米线直径为90纳米。之后在加热板上进行加热,使得异丙醇完全挥发,加热板温度设置为60摄氏度,加热时长1小时。之后在各个电极的导线连接处用导电膏连接剪成小块的导电胶布,并用多用电表测试各个电极的导电性。
[0054]
m在步骤l所述的硅晶圆上旋涂聚二甲基硅氧烷,使其完全覆盖银纳米线电极,旋涂过程在匀胶机内完成,设置转速300转/分钟,旋涂时间60秒。之后在加热台上进行加热固化,设置温度为90摄氏度,加热时长1小时。用刀片对下层结构进行切割,并用镊子小心地将下层结构从砂纸上剥离,完成传感器下层的制备,所得下层结构厚度为450微米。
[0055]
n用棉签在上层底部擦拭少许液态聚二甲基硅氧烷,将其按照图案贴合在传感器下层,在加热台上进行加热固化,设置温度为90摄氏度,加热时长1小时。并用刀片切割多余聚二甲基硅氧烷薄膜,完成传感器的制备,所得到的传感器结构如图1所示。传感器厚度约为1500微米。
[0056]
传感器受压力作用,当压力f
n
<7n时,压力传感的灵敏度为0.15042v/n;当压力7n≤f
n
≤20n时,压力传感器的灵敏度为0.07862v/n。
[0057]
传感器受多维力作用,各个电极电压输出之和与压力分量成正比,灵敏度为0.09886v/n;在不同压力分量下,各个电压输出之比与剪切力分量成正比。
[0058]
实施例2
[0059]
本实施例与实施例1中制备方法的不同之处在于,步骤j
‑
l不同。
[0060]
步骤j取一片洁净的载玻片,将掩模版贴附在载玻片上,给喷枪连接气泵后,用喷枪对硅晶圆进行柔性电极的喷涂,喷涂电极选用的是浓度为20毫克/毫升的银纳米线
‑
异丙醇溶液,银纳米线直径为90纳米。之后在加热板上进行加热,使得异丙醇完全挥发,加热板温度设置为60摄氏度,加热时长1小时。
[0061]
k待银纳米线电极固化后,移除掩模版,并在银纳米线电极表面旋涂聚二甲基硅氧烷,旋涂过程在匀胶机里完成,设置转速300转/分钟,旋涂时间60秒,之后将铝模板放在加热台上加热,设置加热台温度90摄氏度,加热时长1小时,聚二甲基硅氧烷固化成膜。
[0062]
l从载玻片上揭下聚二甲基硅氧烷,银纳米线电极转移到聚二甲基硅氧烷表面,并将其背面贴附在载玻片上,之后在各个电极的导线连接处用导电膏连接剪成小块的导电胶布,并用多用电表测试各个电极的导电性。
[0063]
传感器厚度约为1500微米。
[0064]
实施例3
[0065]
本实施例与实施例1中制备方法的不同之处在于,步骤j和l不同。
[0066]
j用3m胶带将目数为p1000的砂纸贴附在载玻片表面,用剪刀将边缘修剪干净,之后用气枪对砂纸表面进行吹气。
[0067]
l将掩模版贴附在步骤k得到的聚二甲基硅氧烷表面,然后把它们放在磁控溅射腔体内进行溅射铜,设置氩气气体流量40标准毫升/分钟,溅射功率70w,溅射时长30min,铜电极厚度约为100nm。之后在各个电极的导线连接处用导电膏连接剪成小块的铜箔,并用多用
电表测试各个电极的导电性。
[0068]
传感器厚度约为1500微米。
[0069]
实施例4
[0070]
本实施例与实施例1中制备方法的不同之处在于,步骤j之后的步骤不同。
[0071]
j取一片洁净的载玻片,在载玻片上旋涂聚二甲基硅氧烷,旋涂过程在匀胶机里完成,设置转速300转/分钟,旋涂时间60秒,之后将铝模板放在加热台上加热,设置加热台温度90摄氏度,加热时长1小时,聚二甲基硅氧烷固化成膜。
[0072]
k将掩模版贴附在步骤j得到的聚二甲基硅氧烷表面,给喷枪连接气泵后,用喷枪对硅晶圆进行柔性电极的喷涂,喷涂电极选用的是浓度为20毫克/毫升的银纳米线
‑
异丙醇溶液,银纳米线直径为90纳米。之后在加热板上进行加热,使得异丙醇完全挥发,加热板温度设置为60摄氏度,加热时长1小时。之后在各个电极的导线连接处用导电膏连接剪成小块的导电胶布,并用多用电表测试各个电极的导电性。
[0073]
l在步骤l所述的硅晶圆上旋涂聚二甲基硅氧烷,使其完全覆盖银纳米线电极,旋涂过程在匀胶机内完成,设置转速300转/分钟,旋涂时间60秒。之后在加热台上进行加热固化,设置温度为90摄氏度,加热时长1小时。用刀片对下层结构进行切割,并用镊子小心地将下层结构从砂纸上剥离,完成传感器下层的制备,所得下层结构厚度为450微米。
[0074]
m用棉签在上层底部擦拭少许液态聚二甲基硅氧烷,将其按照图案贴合在传感器下层,在加热台上进行加热固化,设置温度为90摄氏度,加热时长1小时。并用刀片切割多余聚二甲基硅氧烷薄膜,完成传感器的制备。
[0075]
传感器厚度约为1500微米。
[0076]
实施例5
‑6[0077]
实施例5
‑
6采用与实施例1中相似的制备方法,不同之处请参见表1
‑
3。
[0078][0079]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1