一种具有互补螺旋结构柔性压力传感器、制备方法及其应用
1.本发明属于激光微纳加工技术领域,具体涉及一种具有互补螺旋结构柔性压力传感器、制备方法及其应用。
背景技术:
2.柔性电容式压力传感器在电子皮肤、人机交互和可穿戴健康检测等尖端应用领域具有广阔的应用前景。电容式压力传感器的创新主要依靠于新型电极材料和结构。石墨烯因其优异的导电性、柔韧性和机械强度而成为各种柔性电子器件中常用的电极材料。传统的制作石墨烯电极的方法如化学剥离法、化学气相沉积法、分散黏附法等制备出的石墨烯电极往往需要附着在特殊的衬底上,或多或少的降低了其灵活性,从而降低了传感器的性能。
3.此外,石墨烯电极的任意图案化也是限制电容式压力传感器性能优化的技术挑战,目前人们采用的高温还原、化学还原、喷墨还原等只能实现一些简单的图案化还原,同时也存在分辨率低、还原速度较慢等问题。此外,电极的延展性以及机械强度也极大地限制了石墨烯电极在柔性电容式压力传感器方面的应用。
技术实现要素:
4.针对现有技术的不足,本发明要解决的问题是:利用激光加工制备具有互补螺旋电极结构的柔性压力传感器。利用激光直写技术作用在抽滤成膜的氧化石墨烯/丝素蛋白复合薄膜表面,激光的光热效应可以去除氧化石墨烯中的含氧官能团,使得氧化石墨烯/丝素蛋白复合薄膜中的氧化石墨烯被还原并形成螺旋结构电极,氧化石墨烯/丝素蛋白复合薄膜优异的柔韧性和延展性使激光还原后的还原氧化石墨烯/丝素蛋白复合电极具有优异的机械性能;再在一对互补螺旋结构电极之间夹上多孔的胶带,最终得到了具有互补螺旋结构的高性能柔性压力传感器,可以实现对手指弯曲以及手指接近时的两种模式的超灵敏检测。传感器的主要检测原理为:(1)对于接触检测而言,由平行板电容器公式(其中ε0为真空介电常数、ε
r
为介质层介电常数、a为两个平行板电极之间的相对面积、d为两个平行板电极之间的相对距离)可知,当物体对传感器施加压力时,多孔胶带被压缩使其上下极板间的相对距离d变小,同时多孔胶带中介电常数相对较小的空气被挤出,使得介质的介电常数ε
r
变大,二者共同作用使得在一定压力下,传感器的电容值发生较大变化,具有较高的灵敏度;(2)对于非接触检测而言,由于平行板电容器的边缘电场效应,在边缘区域电场线会扩展到外部空间,对于环盘结构电极的传感器而言,当手指接近时,手指会截取上电极上方的边缘电场线,从而降低上下电极之间的电场强度,最终导致电容减小。而螺旋互补结构的石墨烯电极,其界面上的电极结构可以看成是多个环盘结构电极的叠加,增加了电极的边缘区域面积,有助于从电极板区域向外空间扩展更多的电场。因而当手指靠近时,传感器显示了巨大的电容变化,对手指的接近更为敏感。
5.本发明通过如下技术方案实现:
6.一种具有互补螺旋结构柔性压力传感器,所述柔性压力传感器由上、下两个复合电极和介电层组成,所述复合电极由复合薄膜材料1和纳米螺旋结构2组成,所述介电层为多孔材料3,所述复合薄膜材料1为氧化石墨烯溶液和丝素蛋白溶液混合并抽滤形成的表面光滑复合薄膜材料;所述复合薄膜材料1表面形成有纳米螺旋结构2,所述复合薄膜材料1及纳米螺旋结构2外表面黏附有多孔材料3,上、下两个电极以及介电层形成复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构。
7.所述纳米螺旋结构2由激光加工对复合薄膜材料1进行图案化还原时,复合薄膜中含氧官能团被去除时同时形成螺旋图案化以及纳米孔结构;
8.进一步的,所述复合薄膜材料1厚度为50
‑
200μm。
9.进一步的,所述多孔材料3为多孔泡棉胶带、多孔海绵、陶瓷多孔材料等。
10.进一步的,所述纳米螺旋结构2的孔径为500nm
‑
2μm、螺旋结构总圈数为3
‑
8圈、每一圈螺旋结构的宽度为200
‑
300μm、未加工部位螺旋宽度为100
‑
200μm、螺旋整体部分的尺寸为0.3mm*0.3mm
‑
0.8mm*0.8mm。
11.一种基于激光加工制备具有互补螺旋结构柔性压力传感器的方法,具体步骤如下:
12.(1)、氧化石墨烯/丝素蛋白混合溶液的制备;
13.在一定量的氧化石墨烯溶液中逐滴加入氢氧化钠溶液,使得氧化石墨烯溶液保持中性,然后与丝素蛋白溶液混合从而制备出氧化石墨烯/丝素蛋白混合溶液;
14.(2)、氧化石墨烯/丝素蛋白复合薄膜的制备;
15.首先将微孔滤膜固定在抽滤装置上,随后用去离子水润湿滤膜,最后滴入氧化石墨烯/丝素蛋白混和溶液进行抽滤,从而成功制备氧化石墨烯/丝素蛋白复合薄膜;
16.(3)、利用激光直写方法加工氧化石墨烯/丝素蛋白复合薄膜制备互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极;
17.对氧化石墨烯/丝素蛋白复合薄膜进行剪裁,然后将薄膜固定在平整的基板上,同时保证薄膜表面平整,将基板放置在激光器的光学平台上,调节激光光源和基板表面的相对位置,使得激光聚焦在薄膜表面;在激光控制程序的界面处,输入预加工图形以及加工参数,然后进行激光直写,得到互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极;
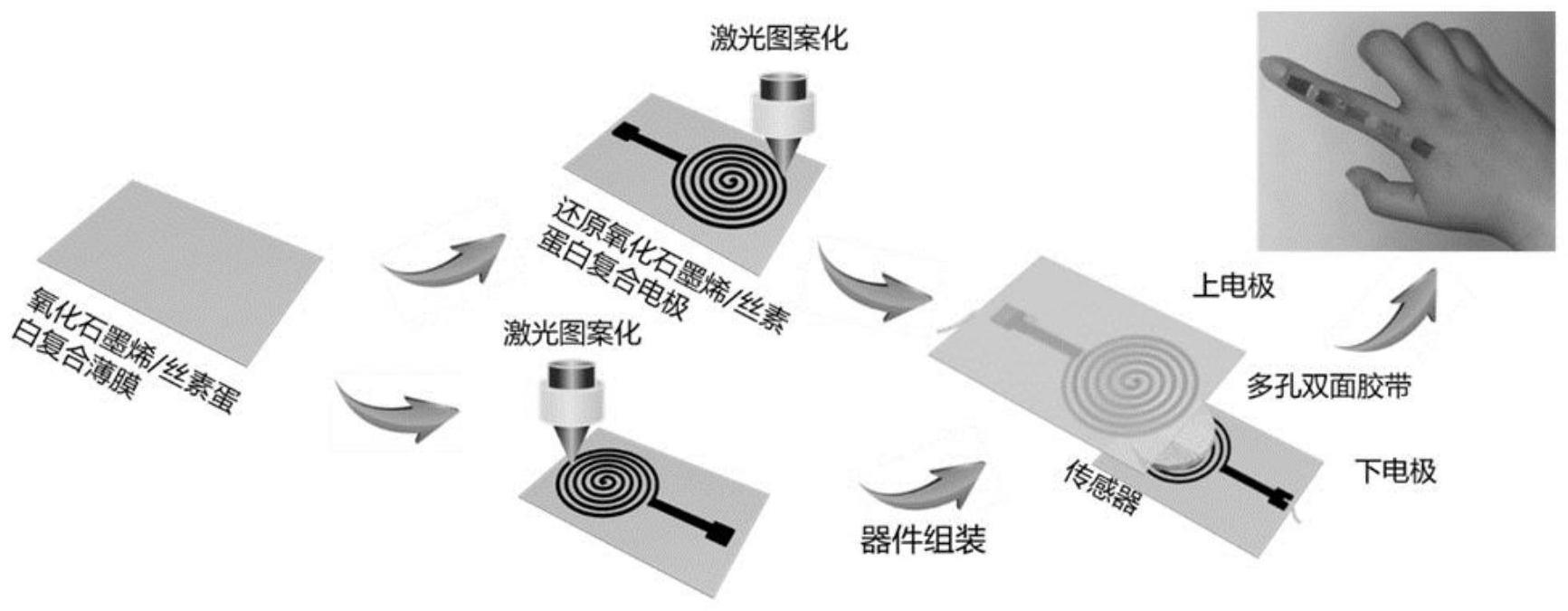
18.(4)、螺旋互补结构压力传感器的制备;
19.对多孔胶带进行剪裁,然后使用导电银胶将银线固定在电极上,最后将多孔胶带夹在两个互补螺旋还原氧化石墨烯/丝素蛋白复合电极之间,从而得到具有螺旋互补结构的压力传感器。
20.进一步地,步骤(1)中制备的具体步骤为:
21.取浓度为5
‑
10mg/ml的氧化石墨烯溶液15
‑
30ml放入量程为100ml的烧杯中,然后逐滴加入浓度为0.05
‑
0.2mol/l的氢氧化钠溶液2
‑
5ml,使得氧化石墨烯溶液的ph值为7,然后加入浓度为30
‑
60mg/ml的丝素蛋白溶液2
‑
6ml,然后将装有氧化石墨烯/丝素蛋白混合物的烧杯放在磁力搅拌器上进行搅拌10s
‑
1min,混合均匀后即得到氧化石墨烯/丝素蛋白混合溶液。
22.进一步地,步骤(1)中氧化石墨烯溶液的具体合成步骤为:
23.首先,将石墨和硝酸钠按照质量比为1∶1
‑
1∶3在0
‑
5℃的冰浴条件下混合,随后加
入质量分数为98%的浓硫酸90
‑
100ml;然后加入5
‑
20g高锰酸钾,在0
‑
5℃的冰浴条件下以500
‑
1000r/min的转速搅拌45
‑
120min;随后升温至35℃,保持120min并加入80ml去离子水然后升温至95℃,保持15min,并加入200ml去离子水,所用注水时间分别为35min和5min;再加入10ml体积浓度为30%的过氧化氢,关闭加热并搅拌5
‑
15min,然后关闭搅拌使其自然沉降20
‑
30h;沉降后倒掉上清液,使用去离子水反复稀释酸性产物,以转速为8000
‑
12000r/min离心10
‑
20min,重复10
‑
18次,直到上层清液的ph值为7;最后将下层产物以1000
‑
1500r/min的转速离心10
‑
20min,重复3
‑
5次,直至无明显的肉眼可见的黑色石墨颗粒,然后再以8000
‑
10000r/min的转速离心15
‑
20min后,倒掉上层清液,摇匀后即得到浓度为5
‑
10mg/ml的氧化石墨烯溶液。
24.进一步地,步骤(1)中丝素蛋白溶液的具体合成步骤为:
25.首先,取6
‑
9g碳酸钠粉末加入3000
‑
5000ml去离子水中,使用玻璃棒或者其他搅拌装置使其充分溶解,然后放置在热台或者其他加热装置中升温,使得碳酸钠溶液保持沸腾状态。然后使用剪刀或者其他剪裁工具将蚕茧外壳剪成面积为1
‑
2cm2的丝状,使用托盘天平或者其他称重仪器称取8
‑
12g蚕片将其放入到沸腾状态的碳酸钠溶液中,煮沸20
‑
50min后,将其取出。然后采用相同的方法再制备一份相同浓度的沸腾的碳酸钠溶液,随后将蚕丝放入新制备的碳酸钠溶液中煮沸20
‑
50min,取出后反复浸泡到去离子水中15
‑
25次后,挤出水分,将其摊开在铝箔或者其他平整的基板上,放置于通风橱或者其他干燥通风处20
‑
30h后,自然晾干得到丝素蛋白纤维。然后取2
‑
8g干燥的丝素蛋白纤维放入烧杯中,使用胶头滴管或者其他取样工具吸取15
‑
25ml、浓度为8
‑
10mg/ml的溴化锂溶液,然后将混合物放置在50
‑
80℃的真空干燥箱或者其他加热装置中加热5
‑
8h,得到暗黄色的粘稠液体。然后将该粘稠液倒入分子量为10000
‑
18000的透析袋中,使用夹子或者其他夹持工具将透析袋夹紧,然后将其放置在装有去离子水的烧杯中,在0
‑
10℃下透析60
‑
80h,每隔10h更换一次去离子水,去除溶液中的盐离子,透析完毕后,以6000
‑
12000r/min的转速、离心15
‑
30min后,取上清液即为浓度为30
‑
60mg/ml的丝素蛋白溶液。
26.进一步地,步骤(2)中制备的具体步骤为:
27.打开抽滤装置开关,将所购孔径为0.2μm
‑
0.25μm、直径为45
‑
55mm的水系微孔滤膜固定于抽滤瓶下方;使用胶头滴管或者其他取样工具吸取3
‑
5ml去离子水,滴入水系微孔滤膜上,待去离子水完全润湿滤膜时,使用胶头滴管或者其他取样工具吸取10
‑
15ml氧化石墨烯/丝素蛋白混合溶液,随后滴入水系微孔滤膜上,等待12
‑
15h后,得到厚度为50
‑
200μm的氧化石墨烯/丝素蛋白复合薄膜。
28.进一步地,步骤(2)中加工具体步骤为:
29.使用3m胶带将抽滤好的氧化石墨烯/丝素蛋白复合膜固定在载玻片上,完全晾干后,将氧化石墨烯/丝素蛋白复合薄膜和水系微孔滤膜进行剥离;使用剪刀裁剪出5mm*10mm
‑
10mm*20mm大小的长方形;使用固定工具将氧化石墨烯/丝素蛋白复合薄膜固定于50mm*50mm*1mm的基板上,所设定的加工区域面积为3mm*6mm
‑
8mm*16mm,调节激光头和薄膜间距离为8
‑
12cm,确保激光聚焦位置为薄膜表面;打开与激光器相连的电脑控制软件,调节线间距、激光功率、加工速度等相关参数,输入预加工的螺旋结构图案,面积为3mm*6mm
‑
8mm*16mm,调节起始加工位置,确保加工区域位于氧化石墨烯/丝素蛋白复合薄膜上;加工后即得到面积大小为3mm*6mm
‑
8mm*16mm的激光直写方法制备的互补螺旋结构还原氧化石
墨烯/丝素蛋白复合电极;其中,纳米螺旋结构部分的孔径为500nm
‑
2μm、螺旋结构总圈数为3
‑
8圈、每一圈螺旋结构的宽度为200
‑
300μm、未加工部位螺旋宽度为100
‑
200μm。
30.进一步地,在与激光器相连的电脑控制软件中,使用的激光波长为343nm、激光功率参数设置为15%
‑
20%、线间距为0.005
‑
0.01mm、扫描速度为200
‑
500mm/s、加工频率为20
‑
40khz,使得氧化石墨烯表面形成互补螺旋结构。
31.进一步地,步骤(3)中螺旋互补结构柔性压力传感器制备的具体步骤为:
32.首先,使用剪刀或者其他剪裁工具对厚度为2
‑
3mm的多孔胶带剪裁成5mm*10mm
‑
10mm*20mm大小的长方形,然后使用导电银胶将银线固定在互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极的末端,5
‑
10min后导电银胶变干,最后将多孔胶带夹在两个尺寸为5mm*10mm
‑
10mm*20mm的互补螺旋还原氧化石墨烯/丝素蛋白复合电极之间,从而,螺旋互补结构压力传感器得以成功制备。
33.本发明的另一目的是提供了一种激光加工制备具有互补螺旋结构柔性压力传感器在手指弯曲检测方面的应用,具体地,使用3m胶带或者其他固定装置将螺旋互补结构压力传感器贴附在食指关节处(手指伸直时贴附),然后将螺旋互补结构压力传感器的两端导线连接到lcr
‑
6200数字电桥测试仪上,使用量角器标定食指关节处的弯曲角度,当食指关节弯曲0
°
、30
°
、60
°
、90
°
时,螺旋互补结构压力传感器电容的相对变化(δc/c0)范围为0
‑
0.5;螺旋互补结构压力传感器在手指上弯曲时,由平行板电容器公式可得(其中ε0为真空介电常数、ε
r
为介质层介电常数、a为两个平行板电极之间的相对面积、d为两个平行板电极之间的相对距离),弯曲会导致上下电极之间的距离变小,导致电容变大。此外,弯曲时也会使得多孔双面胶中介电常数较小的空气被挤出,使得介电层的介电常数增大,导致电容变大,二者共同作用使得该螺旋互补结构压力传感器可以实现对手指弯曲程度的精确检测。
34.本发明的第三目的是提供了一种激光加工制备具有互补螺旋结构柔性压力传感器在手指接近度检测方面的应用,具体地,使用3m胶带或者其他固定装置将螺旋互补结构压力传感器贴附在载玻片或者其他平整基板上,然后将螺旋互补结构压力传感器的两端导线连接到lcr
‑
6200数字电桥测试仪上,当手指距离传感器上电极表面0
‑
6cm时,螺旋互补结构压力传感器电容的变化值(c/c0)为0.86
‑
1.0。
35.作为对比,使用相同方法测量了环盘结构压力传感器在手指距离传感器上电极表面0
‑
6cm时的电容变化值(c/c0)为0.9
‑
1.01,表明互补螺旋结构传感器对手指接近度的检测更为敏感;由于平行板电容器的边缘电场效应,在边缘区域电场线会扩展到外部空间,对于环盘结构电极的传感器而言,当手指接近时,手指会截取上电极上方的边缘电场线,从而降低上下电极之间的电场强度,最终导致电容减小。而螺旋互补结构的石墨烯电极,其界面上的电极结构可以看成是多个环盘结构电极的叠加,增加了电极的边缘区域面积,有助于从电极板区域向外空间扩展更多的电场。因而当手指靠近时,传感器显示了巨大的电容变化,对手指的接近更为敏感。
36.与现有技术相比,本发明的优点如下:
37.(1)、采用激光加工制备具有互补螺旋结构的复合薄膜材料1
‑
纳米螺旋结构2复合电极,可以实现对自支撑的还原氧化石墨烯/丝素蛋白复合薄膜的快速以及任意复杂图案
化的精细还原;
38.(2)、使用氧化石墨烯溶液、蚕茧以及多孔双面胶作为原料,具有易获取、成本低、生物兼容性好等优点;
39.(3)、采用激光加工制备的复合薄膜材料1
‑
纳米螺旋结构2复合电极,氧化石墨烯对丝素蛋白进行改性,使得复合电极具有优异的柔性以及强延展性等特点,具有良好的力学拉伸性能;
40.(4)、采用激光加工制备的具有互补螺旋结构的复合薄膜材料1
‑
纳米螺旋结构2复合电极与多孔材料3组装得到的复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构传感器,可以实现对物体接触(手指弯曲)和非接触(手指接近)两种模式的超灵敏检测。
附图说明
41.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
42.图1为本发明的一种基于激光加工制备具有互补螺旋结构柔性压力传感器的器件结构示意图;
43.图2为本发明的一种基于激光加工制备由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的压力传感器的制备流程示意图;
44.图3为本发明的一种基于激光加工制备具有互补螺旋结构压力传感器中复合薄膜材料1
‑
纳米螺旋结构2复合电极局部的激光扫描共聚焦显微镜图像;
45.图4为本发明的一种基于激光加工制备由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的压力传感器的扫描电子显微镜图像;其中,(a)为由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组成的传感器截面的扫描电子显微镜图像;(b)为互补螺旋结构压力传感器中复合薄膜材料1
‑
纳米螺旋结构2复合电极中复合薄膜材料1的扫描电子显微镜图像;(c)为互补螺旋结构压力传感器中激光还原复合薄膜材料1
‑
纳米螺旋结构2复合电极的扫描电子显微镜图像;
46.图5为本发明的一种基于激光加工制备由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的具有互补螺旋结构的压力传感器,其电容的相对变化值随手指弯曲角度的变化图像;
47.图6为本发明的一种基于激光加工制备由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的具有互补螺旋结构的压力传感器在手指靠近时,传感器周围电场的分布情况示意图;
48.图7为本发明的一种基于激光加工制备由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的具有互补螺旋结构的压力传感器以及具有环盘结构的压力传感器,其电容的变化值随手指与传感器上电极之间距离的变化图像。
具体实施方式
49.下面结合附图对本发明做进一步地介绍。
50.实施例1
51.一种具有互补螺旋结构柔性压力传感器,所述柔性压力传感器由上、下两个复合电极和介电层组成,所述复合电极由复合薄膜材料1和纳米螺旋结构2组成,所述介电层为多孔材料3,所述复合薄膜材料1为氧化石墨烯溶液和丝素蛋白溶液混合并抽滤形成的表面光滑复合薄膜材料;所述复合薄膜材料1表面形成有纳米螺旋结构2,所述复合薄膜材料1及纳米螺旋结构2外表面黏附有多孔材料3,上、下两个电极以及介电层形成复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构。
52.所述纳米螺旋结构2由激光加工对复合薄膜材料1进行图案化还原时,复合薄膜中含氧官能团被去除时同时形成螺旋图案化以及纳米孔结构;
53.所述复合薄膜材料1厚度为50
‑
200μm。
54.所述多孔材料3为多孔泡棉胶带、多孔海绵、陶瓷多孔材料等。
55.所述纳米螺旋结构2的孔径为500nm
‑
2μm、螺旋结构总圈数为3
‑
8圈、每一圈螺旋结构的宽度为200
‑
300μm、未加工部位螺旋宽度为100
‑
200μm、螺旋整体部分的尺寸为0.3mm*0.3mm
‑
0.8mm*0.8mm。
56.实施例2
57.如图1所示,一种基于激光加工制备具有互补螺旋结构柔性压力传感器的方法,具体步骤如下:
58.(1)、氧化石墨烯/丝素蛋白混合溶液的制备;
59.使用胶头滴管吸取浓度为8mg/ml的氧化石墨烯溶液20ml放入量程为100ml的烧杯中,然后逐滴加入浓度为0.05mol/l的氢氧化钠溶液3ml,使得氧化石墨烯溶液的ph值为7,然后加入浓度为40mg/ml的丝素蛋白溶液2ml,然后将装有氧化石墨烯/丝素蛋白混合物的烧杯放在磁力搅拌器上进行搅拌10s
‑
1min,混合均匀后即得到氧化石墨烯/丝素蛋白混合溶液。
60.其中,所使用的氧化石墨烯溶液使用hummer’s法合成的,具体合成步骤为:首先将石墨和硝酸钠按照质量比1:1在0℃的冰浴条件下混合,加入质量分数为98%的浓硫酸90ml;加入7g高锰酸钾,在0
‑
5℃的冰浴条件下以800r/min的转速搅拌60min;随后升温至35℃,保持120min并加入80ml去离子水然后升温至95℃,保持15min,并加入200ml去离子水,所用注水时间分别为35min和5min;再加入10ml体积浓度为30%的过氧化氢,关闭加热并搅拌10min,然后关闭搅拌使其自然沉降24h;沉降后倒掉上清液,使用去离子水反复稀释酸性产物,以转速为12000r/min离心15min,重复15次,直到上层清液的ph值为7;最后将下层产物以1000r/min的转速离心10min,重复3次,直至无肉眼可见的黑色石墨颗粒,然后再以8000r/min的转速离心15min后,倒掉上层清液,摇匀后即得到浓度为8mg/ml的氧化石墨烯溶液。
61.其中,所使用的丝素蛋白溶液的具体制备步骤为:首先,取8g碳酸钠粉末加入5000ml去离子水中,使用玻璃棒搅拌使其充分溶解,然后放置在热台上升温,使得碳酸钠溶液保持沸腾状态。然后使用剪刀将蚕茧外壳剪成面积为1cm2的丝状,使用托盘天平称取10g蚕片将其放入到沸腾状态的碳酸钠溶液中,煮沸30min后,将其取出。然后采用相同的方法
再制备一份相同浓度的沸腾的碳酸钠溶液,随后将蚕丝放入新制备的碳酸钠溶液中煮沸30min,取出后反复浸泡到去离子水中20次后,挤出水分,将其摊开在铝箔上,放置于通风橱中24h后,自然晾干得到丝素蛋白纤维。然后取6g干燥的丝素蛋白纤维放入烧杯中,使用胶头滴管吸取20ml、浓度为9mg/ml的溴化锂溶液,然后将混合物放置在70℃的真空干燥箱中加热5h,得到暗黄色的粘稠液体。然后将该粘稠液倒入分子量为14000的透析袋中,使用夹子将透析袋夹紧,然后将其放置在装有去离子水的烧杯中,在4℃下透析72h,每隔10h更换一次去离子水,去除溶液中的盐离子,透析完毕后,以10000r/min的转速、离心20min后,取上清液即为浓度为40mg/ml的丝素蛋白溶液。
62.(2)、氧化石墨烯/丝素蛋白复合薄膜的制备;
63.使用镊子选取并夹起表面平整的直径为50mm、孔径为0.22μm的水系(混合纤维素)微孔滤膜,并打开无油隔膜式真空泵,将滤膜固定在漏斗基座上,随后盖上过滤杯,并用铝夹固定住;使用容量为5ml的胶头滴管吸取3ml去离子水并将其完全滴在水系微孔滤膜上,当滤膜处于完全润湿状态时,使用容量为5ml的胶头滴管吸取12ml的氧化石墨烯/丝素蛋白混合溶液,并将其滴入水系微孔滤膜上。等待12h后,即得到厚度为100μm的复合薄膜材料1构成的氧化石墨烯/丝素蛋白复合薄膜。
64.(3)利用激光直写方法加工复合薄膜材料1构成的氧化石墨烯/丝素蛋白复合薄膜制备互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极;
65.本发明所用的激光波长为343nm的紫外激光器,激光器功率、线间距、扫描速度以及加工频率具有高度可调性;使用3m胶带将抽滤好的氧化石墨烯/丝素蛋白复合膜固定在载玻片上,完全晾干后,将氧化石墨烯/丝素蛋白复合薄膜和微孔滤膜进行手动剥离;使用剪刀剪裁出8mm*16mm大小的长方形;使用3m胶带将氧化石墨烯/丝素蛋白复合薄膜固定于50mm*50mm*1mm的基板上,所设定的加工区域面积为6mm*12mm;调节激光头与薄膜间距离为10cm时,激光聚焦在薄膜的表面;打开与激光器相连的电脑控制软件,设置激光功率为20%、线间距为0.01、扫描速度为500mm/s、加工频率为40hz、输入预加工的螺旋结构图案,调节起始加工位置,确保加工区域位于氧化石墨烯/丝素蛋白复合薄膜上;加工后即得到面积大小为6mm*12mm的激光直写方法制备的复合薄膜材料1
‑
纳米螺旋结构2构成的互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极。其中,纳米螺旋结构部分的孔径为1μm、螺旋结构总圈数为6圈、每一圈螺旋结构的宽度为250μm、未加工部位螺旋宽度为125μm。
66.(4)螺旋互补结构柔性压力传感器的制备;
67.使用剪刀将厚度为2.65mm(厚度由图4(a)器件的横截面扫描电子显微镜图得出)的多孔胶带剪裁成6mm*12mm大小的长方形,然后使用导电银胶将直径为0.1mm的银线固定在互补螺旋结构还原氧化石墨烯/丝素蛋白复合电极的两端,5min后导电银胶变干,最后将多孔胶带夹在两个尺寸为6mm*12mm的螺旋互补石墨烯电极之间,成功制备出由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的具有互补螺旋结构压力传感器。
68.图1及图2分别为本发明的器件结构以及制备流程示意图,从图中可以看出操作过程简单、免去了复杂繁琐的加工工艺;
69.图3以及图4可知螺旋互补结构压力传感器中图案化复合薄膜材料1
‑
纳米螺旋结构2构成的还原氧化石墨烯/丝素蛋白复合电极的表面形貌以及器件整体结构的微观结构;
由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的互补螺旋结构压力传感器的厚度为2.65mm。
70.实施例3
71.本实施例提供了一种基于激光加工制备具有互补螺旋结构柔性压力传感器在手指弯曲检测方面的应用,具体步骤如下:
72.首先使用3m胶带将螺旋互补结构压力传感器贴附在食指关节处(手指伸直时贴附),然后将螺旋互补结构压力传感器两端导线连接到lcr
‑
6200数字电桥测试仪上,使用量角器标定食指关节的弯曲角度,当手指关节弯曲0
°
、30
°
、60
°
、90
°
时,螺旋互补结构压力传感器电容的相对变化(δc/c0)分别为0、0.21、0.33、0.48;当手指弯曲时,由平行板电容器可得,弯曲时上下电极之间距离d减小,同时也会导致多孔双面胶中介电常数较小的空气被挤出,使得介电层的介电常数ε
r
变大,二者共同作用使得该补螺旋结构压力传感器可以实现对手指弯曲程度的精确检测;
73.图5为将由复合薄膜材料1
‑
纳米螺旋结构2
‑
多孔材料3
‑
纳米螺旋结构2
‑
复合薄膜材料1的多级微纳结构组装而成的螺旋互补结构压力传感器贴附到手指关节处时,传感器的相对电容变化随手指的弯曲角度的变化关系,手指的弯曲程度越大,其电容的变化值越大;
74.实施例4
75.本实施例提供了一种基于激光加工制备具有互补螺旋结构柔性压力传感器在手指接近度检测方面的应用,具体步骤如下:使用3m胶带将螺旋互补结构压力传感器贴附在载玻片上,然后将螺旋互补结构压力传感器的两端导线连接到lcr
‑
6200数字电桥测试仪上,当手指距离传感器上表面分别为6cm、4cm、2cm、0.1cm时,螺旋互补结构压力传感器电容的变化值(c/c0)分别为0.99、0.98、0.93、0.86。作为对比,使用相同方法测量了环盘结构压力传感器,当手指距离传感器上表面分别为6cm、4cm、2cm、0.1cm时,环盘结构压力传感器电容的变化值(c/c0)分别为1.01、0.99、0.95、0.9,对比结果如图6所示,因此,互补螺旋结构传感器对手指接近度的检测更为敏感;基于平行板电容器的边缘电场效应,在边缘区域的电场线会扩展到外部空间,如图6所示,对于环盘结构电极的传感器而言,当手指接近时,手指会截取上电极上方的边缘电场线,从而降低上下电极之间的电场强度,存储在电容中的电荷减小,最终导致电容减小。而螺旋互补结构的还原氧化石墨烯/丝素蛋白复合电极,其界面上的电极结构可以看成是多个环盘结构电极的叠加,增加了电极的边缘区域面积,有助于从电极板区域向外空间扩展更多的电场。因而当手指靠近时,传感器显示了巨大的电容变化,对手指的接近更为敏感。
76.图6为当手指接近传感器上方时,手指及传感器周围边缘电场分布示意图;
77.图7为两种不同电极结构(复合薄膜材料1
‑
纳米螺旋结构2电极结构、环盘电极结构)在手指靠近传感器上表面时其电容的变化值随手指与传感器上表面的垂直距离之间的变化示意图,其中复合薄膜材料1
‑
纳米螺旋结构2电极结构的传感器对手指的接近度更为敏感其边缘电场向外空间扩散的更大;
78.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简
单变型,这些简单变型均属于本发明的保护范围。
79.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
80.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1