航天器推进系统姿轨控管路超压自主管理测试方法和系统与流程
1.本发明涉及航天器测试技术领域,具体地,涉及一种航天器推进系统姿轨控管路超压自主管理测试方法和系统。
背景技术:
2.航天器推进系统主要配合姿轨控系统完成姿态控制、轨道修改、飞轮卸载等任务,推进系统姿轨控管路超压,可能会导致压力传感器超量程、自锁阀反向承压过高,严重时可能会导致推进剂泄漏、航天器无推力、推力不足、控制姿态翻转等。而姿轨控管路超压自主管理测试本身又将引入高压源,测试过程中控制不好,可能又会导致上述问题。
3.专利文献cn104821894a(申请号:cn201510178446.8)公开了一种卫星在轨自主管理系统及自主管理方法。该专利仅适用于卫星整星关键系统、关键参数健康状态管理,并无涉及到推进分系统的姿轨控管路超压自主管理,更不涉及相关的自主管理测试方法。
4.专利文献cn103412569a(申请号:cn201310291644.6)公开了一种火星捕获过程探测器自主管理方法,包括:火星探测器火星捕获前、捕获过程、捕获后三个管理序列,用于对姿轨控分系统、电源分系统、综合电子分系统、测控数传分系统进行管理。通过探测器能源、通信、姿态、光照等方面的多学科优化设计,建立完整的捕获过程自主管理序列,从而实现探测器捕获过程的自主管理。该专利适用于适用于火星捕获过程各飞行节点的序列管理,并无具体到推进分系统的姿轨控管路超压自主管理,也不涉及相关的自主管理测试方法。
5.专利文献cn107300864a(申请号:cn201610238871.6)公开了一种自主管理的航天器信息系统及其操作方法。该专利仅适用于卫星顶层信息系统自主管理设计,并无具体到推进分系统的姿轨控管路超压自主管理,也不涉及相关的自主管理测试方法。
6.专利文献cn107300864a(申请号:cn201610238871.6)公开了一种自主管理的航天器信息系统及其操作方法,采用地面与航天器联合工作模式执行自主任务管理,包括5个硬子系统:任务、控推管理、环热管理、能源管理和载荷管理子系统,其中,任务子系统用于对航天器执行任务分析、任务规划和任务评估,同时对各个子系统进行实时监控,控推管理、环热管理、能源管理和载荷管理子系统用于任务执行并反馈任务执行的结果。该专利仅适用于地面与航天器联合工作模式的自主任务管理,并无涉及到推进分系统的姿轨控管路超压自主管理,更不涉及相关的自主管理测试方法。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种航天器推进系统姿轨控管路超压自主管理测试方法和系统。
8.根据本发明提供的航天器推进系统姿轨控管路超压自主管理测试方法,包括:
9.步骤1:连接姿轨控管路与外接气源;
10.步骤2:打开自锁阀,在下游管路与外接气源连通后关闭自锁阀;
11.步骤3:将上游管路气体排空;
12.步骤4:调整姿轨控管路超压门限,进行超压自主管理;
13.步骤5:根据预设程序打开姿轨控管路自锁阀,下游管路压力降低为大气压,若姿轨控管路自锁阀上游与外接气源连接后,自锁阀下游管路压力无变化,则表明超压自主管理成功。
14.优选的,所述步骤1包括:将姿轨控管路自锁阀上游与0.15mpa表压气源连接,此时自锁阀下游管路压力为大气压。
15.优选的,所述步骤2包括:航天器推进系统按预设程序加电,并根据指令打开姿轨控管路自锁阀,自锁阀下游管路压力由大气压变化为0.25mpa绝压后关闭姿轨控管路自锁阀。
16.优选的,所述步骤3包括:将姿轨控管路自锁阀上游管路气体排空至大气压。
17.优选的,所述步骤4包括:调低姿轨控管路超压门限至0.2mpa绝压后,进行姿轨控管路超压自主管理。
18.根据本发明提供的航天器推进系统姿轨控管路超压自主管理测试系统,包括:
19.模块m1:连接姿轨控管路与外接气源;
20.模块m2:打开自锁阀,在下游管路与外接气源连通后关闭自锁阀;
21.模块m3:将上游管路气体排空;
22.模块m4:调整姿轨控管路超压门限,进行超压自主管理;
23.模块m5:根据预设程序打开姿轨控管路自锁阀,下游管路压力降低为大气压,若姿轨控管路自锁阀上游与外接气源连接后,自锁阀下游管路压力无变化,则表明超压自主管理成功。
24.优选的,所述模块m1包括:将姿轨控管路自锁阀上游与0.15mpa表压气源连接,此时自锁阀下游管路压力为大气压。
25.优选的,所述模块m2包括:航天器推进系统按预设程序加电,并根据指令打开姿轨控管路自锁阀,自锁阀下游管路压力由大气压变化为0.25mpa绝压后关闭姿轨控管路自锁阀。
26.优选的,所述模块m3包括:将姿轨控管路自锁阀上游管路气体排空至大气压。
27.优选的,所述模块m4包括:调低姿轨控管路超压门限至0.2mpa绝压后,进行姿轨控管路超压自主管理。
28.与现有技术相比,本发明具有如下的有益效果:
29.本发明适用于航天器推进系统姿轨控管路超压自主管理测试,避免自锁阀反向承受过高压力,保证了推进系统产品安全性和测试覆盖性。
附图说明
30.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
31.图1是本发明航天器推进系统姿轨控管路超压自主管理测试方法流程图。
32.图2是本发明航天器推进系统姿轨控管路超压自主管理测试方法连接图。
具体实施方式
33.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
34.实施例:
35.根据本发明提供的航天器推进系统姿轨控管路超压自主管理测试方法,对于姿轨控管路自锁阀不能反向承受过高压力时,自主管理程序具备超压门限调整功能,以保证推进系统产品安全性和测试覆盖性,如图1,具体包括以下步骤:
36.步骤1:姿轨控管路与外接气源连接;
37.步骤2:打开自锁阀,下游管路与外接气源连通后,关闭自锁阀;
38.步骤3:上游管路气体排空;
39.步骤4:调低姿轨控管路超压门限,启动超压自主管理功能;
40.步骤5:程序触发自锁阀打开,下游管路压力降低后,程序触发自锁阀关闭;
41.步骤6:姿轨控管路与外接气源连接,自锁阀下游压力不变。
42.推进系统姿轨控管路超压自主管理程序具备超压门限调整功能。
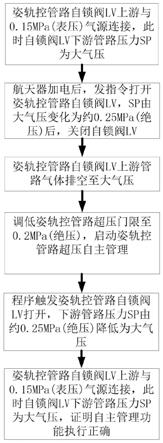
43.所述步骤1中姿轨控管路自锁阀lv上游与0.15mpa(表压)气源连接,此时自锁阀lv下游管路压力sp为大气压;所述步骤2中航天器按程序加电,发指令打开姿轨控管路自锁阀lv,sp由大气压变化为约0.25mpa(绝压)后,发指令关闭姿轨控管路自锁阀lv;所述步骤3中将姿轨控管路自锁阀lv上游管路气体排空至大气压;所述步骤4中调低姿轨控管路超压门限至0.2mpa(绝压),启动姿轨控管路超压自主管理功能;所述步骤5中程序触发姿轨控管路自锁阀lv打开,下游管路压力sp由约0.25mpa(绝压)降低为大气压;所述步骤6中姿轨控管路自锁阀lv上游与0.15mpa(表压)气源连接,此时自锁阀lv下游管路压力sp为大气压,证明自主管理功能执行正确。
44.如图2,为本发明测试系统的连接示意图,包括依次连接的接气源、截止阀jk、自锁阀lv和压力传感器sp,以及与压力传感器sp连接的发动机或推力器。
45.根据本发明提供的航天器推进系统姿轨控管路超压自主管理测试系统,包括:模块m1:连接姿轨控管路与外接气源;模块m2:打开自锁阀,在下游管路与外接气源连通后关闭自锁阀;模块m3:将上游管路气体排空;模块m4:调整姿轨控管路超压门限,进行超压自主管理;模块m5:根据预设程序打开姿轨控管路自锁阀,下游管路压力降低为大气压,若姿轨控管路自锁阀上游与外接气源连接后,自锁阀下游管路压力无变化,则表明超压自主管理成功。
46.所述模块m1包括:将姿轨控管路自锁阀上游与0.15mpa表压气源连接,此时自锁阀下游管路压力为大气压。所述模块m2包括:航天器推进系统按预设程序加电,并根据指令打开姿轨控管路自锁阀,自锁阀下游管路压力由大气压变化为0.25mpa绝压后关闭姿轨控管路自锁阀。所述模块m3包括:将姿轨控管路自锁阀上游管路气体排空至大气压。所述模块m4包括:调低姿轨控管路超压门限至0.2mpa绝压后,进行姿轨控管路超压自主管理。
47.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的
系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
48.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1