快捷去除虚解的全张量定位方法及全张量定位装置
1.本发明涉及磁法勘探领域,特别是涉及一种快捷去除虚解的全张量定位方法及全张量定位装置。
背景技术:
2.全张量磁梯度描述的是磁场矢量在三维空间的变化率信息,即磁场矢量的三个分量在空间中三个方向上的梯度。全张量磁梯度的测量结果具有受磁化方向影响小,能够反映目标体的矢量磁矩信息,且能更好地反演场源参数(方位、磁矩等)等优点,故可以对场源进行定位和追踪,提高磁源体的分辨率。全张量磁梯度的测量及解释应用被视为磁法勘探工作的一次重大突破,其在资源勘探、军事、考古、环境等领域都有着重要的应用价值。
3.由超导量子干涉仪(squid:superconducting quantum interference device)组成的超导磁传感器是目前已知灵敏度最高的磁传感器,能够测量非常微弱的磁信号,而由squid作为核心器件组成的超导全张量磁梯度测量系统,相对于传统的基于磁通门构建的全张量磁梯度测量系统,具有明显的灵敏度优势,是目前磁法物探技术的重要发展方向和国际研究前沿。如图1所示,基于磁通门构建的全张量磁梯度测量系统,采用十字框架结构,缺点在于需要的磁强计数量多,相应的成本高,消耗的液氮多。
4.《地球物理学报》2016年59卷的论文《磁偶极子梯度张量的几何不变量及其应用》给出了一种基于全张量几何不变量的磁源定位方法。该论文首先利用全张量磁梯度矩阵的特征值和总场求解磁偶极子相对于测量点的距离和磁矩模,然后利用几何不变量求解磁偶极子的位置及磁矩矢量的单位向量,最后在去除磁偶极子位置及磁矩矢量的虚解后,通过合成他们的单位向量和模,获得磁源的位置。如图2所示,获得所述磁偶极子210位置的所述磁梯度张量系统220,但存在虚解,需要根据先验条件进行判断后去除,而在某些情况下,先验条件未必充足到支持虚解的去除,比如在矿洞里,就无法通过磁源在z的上下方来去除虚解。
5.目前在国内没见相关快捷去除虚解的全张量定位的方法的公开文献,大多数去除虚解的方法是在实际应用中探测目标在测量平面的上方或下方为已知信息,将单点测量数据通过反演得到四组偶极子的三维坐标关于原点对称,从而通过已知信息中的坐标信息可以直接删除两个虚假解,接着通过剩余的两个解求解出测量点处的磁梯度张量值判断真实解。上述普遍使用的去除虚解的方法过程繁琐,而一种新的快捷去除虚解的全张量定位方法具有重要的现实意义。
6.综上所述,提出一种快捷去除虚解的全张量定位方法对具有战略意义的超导磁测量系统至关重要。
技术实现要素:
7.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种快捷去除虚解的全张量定位方法及全张量定位装置,用于解决全张量磁梯度系统在定位过程中去除虚解的过程
繁琐的问题。
8.为实现上述目的及其他相关目的,本发明提出一种快捷去除虚解的全张量定位方法,所述快捷去除虚解的全张量定位方法至少包括:
9.进行梯度测量,获取全张量磁梯度矩阵g中五个独立分量,进而得到完整全张量磁梯度矩阵g;
10.获得地磁方向信息;
11.通过所述全张量磁梯度矩阵g,计算得到三个特征值,进而获取三个特征向量;
12.根据磁源b中磁矩矢量m、位置矢量r与三个特征向量的关系,计算得到所述磁源b中所述位置矢量r与所述磁矩矢量m之间夹角的余弦值;
13.根据所述磁矩矢量m与所述位置矢量r的四种组合,得到四个解;
14.根据磁异常的磁矩矢量所在象限,获取所述磁矩矢量m的方向;
15.获取所述磁矩矢量m对应的所述位置矢量r,进而去除虚解,得到真值,完成所述快捷去除虚解的全张量定位方法。
16.优选地,采用全张量磁梯度测量组件获取全张量磁梯度矩阵g中的五个独立分量。
17.优选地,所述地磁方向通过国际地磁参考场模型或总场及三分量模块获得。
18.优选地,每一个特征值对应一个特征向量。
19.优选地,绝对值最小的所述特征值对应的特征向量和所述磁矩矢量m、位置矢量r垂直;剩余两个特征值对应的所述特征向量和所述磁矩矢量m、位置矢量r在同一平面上。
20.优选地,所述位置适量r与所述磁矩矢量夹角的余弦值
21.优选地,根据欧拉反褶积公式得到所述磁矩矢量m与所述位置矢量r的四种组合,每个磁矩矢量与其相对应的位置矢量的组合是一个解,其中三个虚解,一个真值,每个解位于一个象限。
22.优选地,所述磁异常的磁矩矢量,通过物质的顺磁性或者抗磁性获取。
23.优选地,通过所述位置矢量r与所述磁矩矢量m夹角的余弦值,获取所述磁矩m对应的所述位置矢量r。
24.本发明提出一种快捷去除虚解的全张量定位装置,用于实现所述的快捷去除虚解的全张量定位方法,所述快捷去除虚解的全张量定位装置包括:
25.定位器件,用于获取磁源位置信息;
26.全张量磁梯度测量组件,对磁源进行梯度测量,以获得磁源的全张量磁梯度矩阵;
27.杜瓦,所述杜瓦内部用于储存低温介质,所述全张量磁梯度测量组件设置于所述杜瓦内部的低温环境介质中;
28.测控系统,用于获取所述定位器件、所述全张量磁梯度测量组件的测量信息。
29.优选地,所述测控系统由电源管理模块、定位与惯导模块、杜瓦压强监测模块、低温介质检测模块、高度测量模块、通信模块;
30.其中,所述定位与惯导模块,用于获取系统的位置和姿态信息;
31.所述杜瓦压强监测模块与所述低温介质监测模块,用于获取所述杜瓦内部的压强与温度信息;
32.所述通信模块,用于和所述定位器件、所述全张量磁梯度测量组件及外接设备进
行信息通信。
33.优选地,所述全张量磁梯度测量组件包括一个三轴磁强计和六个squid平面梯度计;所述三轴磁强计设置于正方体模块的侧面;所述squid平面梯度计设置于六棱台模块的侧面;所述六棱台模块的上表面和下表面为正六边形,所述六棱台模块的侧面为等腰梯形;所述正方体模块的下表面和所述六棱台模块的上表面接触。
34.优选地,所述定位器件,将获取的位置信息传输至所述测控系统;所述全张量磁梯度测量组件,将获取的磁场梯度信息传输至所述测控系统,经过处理获取所述全张量磁梯度矩阵信息。
35.如上所述,本发明的一种快捷去除虚解的全张量定位装置及全张量定位方法,具有以下有益效果:
36.本发明的快捷去除虚解的全张量定位装置及全张量定位方法,移动方便,系统分辨率高。
37.本发明的快捷去除虚解的全张量定位装置及全张量定位方法,在明确勘测目标时,首先获取该位置处的地磁场方向,再通过目标的顺磁性或抗磁性,快捷地通过向量积获取目标磁源信息,从而完成目标磁异常的定位,该全张量定位方法,适合多种使用场景。
附图说明
38.图1显示为本技术一示例性的基于磁通门构建的全张量梯度测量系统示意图。
39.图2显示为本技术一示例性的磁偶极子梯度张量场的几何不变量示意图。
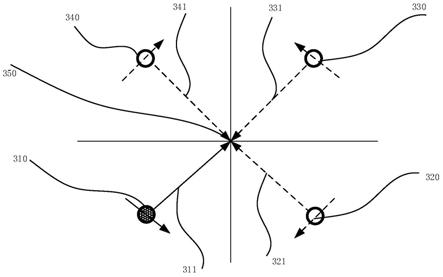
40.图3显示为本技术实施例一提供的虚解与真值示意图
41.图4显示为本技术实施例二提供的快捷去除虚解的全张量定位装置示意图。
42.图5显示为本技术实施例二提供的为测控系统组成示意图
43.图6显示为本技术实施例二提供的全张量磁梯度测量组件示意图
44.元件标号说明
45.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磁偶极子
46.220
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磁梯度张量系统
47.310
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
真值磁矩矢量
48.311
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
真值位置矢量
49.320
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一虚解磁矩矢量
50.321
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一虚解位置矢量
51.330
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二虚解磁矩矢量
52.331
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二虚解位置矢量
53.340
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三虚解磁矩矢量
54.341
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第三虚解位置矢量
55.350
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
测点
56.410
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位器件
57.420
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
测控系统
58.421
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电源管理模块
59.422
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
定位与惯导模块
60.423
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杜瓦压强监测模块
61.424
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
低温介质监测模块
62.425
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
高度测量模块
63.426
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
通信模块
64.430
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
杜瓦
65.440
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
全张量磁梯度测量组件
66.441
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
三轴磁强计
67.442
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
squid平面梯度计
68.443
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
正方体模块
69.444
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
六棱台模块
70.s1~s9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
步骤
具体实施方式
71.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
72.请参阅图3~图6。需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
73.实施例一
74.本实施例提供一种快捷去除虚解的全张量定位方法,所述快捷去除虚解的全张量定位方法至少包括:
75.步骤s1:进行梯度测量,获取全张量磁梯度矩阵g中五个独立分量,从而得到完整全张量磁梯度矩阵g。
76.具体地,所述全张量磁梯度矩阵g是3*3的矩阵,包括9个分量,代表了地磁场的三个分量在空间上的变化率。由于地球主要的磁场梯度相对于异常磁场来说很小,因此所述全张量磁梯度矩阵g可以看作是由于某种磁性异常体产生的磁场梯度张量。在无源空间中磁源b的散度和旋度均为零值,因此所述全张量磁梯度矩阵g中9个分量只有5个分量是独立分量;所述五个独立分量,经过计算,得到完整所述全张量磁梯度矩阵g;其中,
[0077][0078]
步骤s2:获得地磁方向。
[0079]
具体地,作为示例,所述地磁方向通过国际地磁参考场模型(igrf)或总场及三分
量模块获得;
[0080]
具体地,作为示例,通过总场b
total
以及三分量信息bx、by、bz获取下列的方向余弦u1、u2和u3,通过姿态投影获取地磁场的方向;
[0081]
其中,方向余弦表示为:u1=bx/b
total
;u2=by/b
total
;u3=bz/b
total
;
[0082]
进一步地,需要说明,任意可获取所述地磁方向的方法均适用于本发明,不以本实施例为限定,在此不一一赘述。
[0083]
步骤s3:通过所述全张量磁梯度矩阵g或者经过姿态投影后的矩阵,由于其与矩阵g是相似矩阵,故具有相同的特征值和特征向量,计算得到三个特征值,进而获取三个特征向量。
[0084]
具体地,作为示例,所述全张量磁梯度矩阵g,经过姿态投影,获得对应相似矩阵;所述相似矩阵,经过计算,获取三个特征值,三个所述特征值为λ1、λ2及λ3,其中所述λ3的绝对值最小;根据线性代数的相关知识,经过姿态投影后得到的所述矩阵g和所述全张量磁梯度矩阵g具有相同的特征值及相同的特征向量。
[0085]
步骤s4:根据磁源b中磁矩矢量m、位置矢量r与三个特征向量的关系,计算得到所述磁源b中所述位置矢量r与所述磁矩矢量r之间夹角的余弦值。
[0086]
具体地,作为示例,每个所述特征值对应一个特征向量,其中,所述λ1对应特征向量v1,λ2对应特征向量v2,λ3对应特征向量v3,并且,根据全张量磁梯度测量的相关知识,可知所述特征向量v3和所述特征向量v1、特征向量v2垂直;
[0087]
进一步地,作为示例,磁源b的磁矩矢量m、位置矢量r和所述特征向量v3垂直,进而,所述磁矩矢量m、位置矢量r与所述特征向量v1、特征向量v2在一个平面上;
[0088]
进一步地,作为示例,所述位置适量r与所述磁矩矢量夹角的余弦值,即cosφ,其中,
[0089][0090]
步骤s5:根据欧拉反褶积公式g
·
r=
‑
3/r
·
b得到磁矩矢量m、位置矢量r的四种组合,得到四个解;每个磁矩矢量与其相对应的位置矢量的组合是一个解,其中三个虚解,一个真值,每个解位于一个象限。其中,r是所述磁源b与测点之间的距离。
[0091]
步骤s6:根据步骤s5得到四个位置矢量为r1、r2、r3及r4;进一步地,,r1=
‑
a1*v1+a2*v2,r2=
‑
a1*v1
‑
a2*v2,r3=+a1*v1
‑
a2*v2,r4=+a1*v1+a2*v2,并且,a1^2+a2^2=1,a1^2=(λ3‑
λ1)/(λ2‑
λ1),a2^2=(λ2‑
λ3)/(λ2‑
λ1),其中,所述r1、r2、r3及r4是磁源到测量点位置矢量的单位向量;a1和a2是由特征值表示的系数;;
[0092]
所述位置矢量r1对应磁矩矢量m1,所述位置矢量r2对应磁矩矢量m2,所述位置矢量r3对应磁矩矢量m3,所述位置矢量r4对应磁矩矢量m4;进一步地,m1=
‑
b1*v1
‑
b2*v2,m2=
‑
b1*v1+b2*v2,m3=+b1*v1+b2*v2,m4=+b1*v1
‑
b2*v2,并且,b1^2+b2^2=1,其中,所述m1、m2、m3及m4是磁矩矢量的单位向量;b1和b2是由特征值表示的系数;
[0093]
[0094][0095]
步骤s7:所述位置矢量r1与所述磁矩矢量m1位于一个象限,其中,所述磁矩矢量m1与所述位置矢量r1构成一个解;
[0096]
所述位置矢量r2与所述磁矩矢量m2位于一个象限,其中,所述磁矩矢量m2与所述位置矢量r2构成一个解;
[0097]
所述位置矢量r3与所述磁矩矢量m3位于一个象限,其中,所述磁矩矢量m3与所述位置矢量r3构成一个解;
[0098]
所述位置矢量r4与所述磁矩矢量m4位于一个象限;其中,所述磁矩矢量m4与所述位置矢量r4构成一个解。
[0099]
步骤s8:总共四个解中,有三个虚解,一个真值,所述虚解和所述真值的位置如图3所示,其中包括:测点350;所述真值磁矩矢量310,对应的所述真值位置矢量311;所述第一虚解磁矩矢量320,对应的第一虚解位置矢量321;所述第二虚解磁矩矢量330,对应第二虚解位置矢量331;所述第三虚解磁矩矢量340,对应的第三虚解位置矢量341。
[0100]
常见的磁异常以感应磁场为主,即与地球磁场的方向相同或相反。由于磁矩矢量和位置矢量的单位向量只有四种组合可满足,即存在3个虚解和一个真值,这四个解的磁矩方向各不相同,只要确定磁异常的磁矩方向,就可以唯一确定真值。磁异常产生的感应磁场的方向与地磁场方向的关系与磁异常(矿物)的性质有关。
[0101]
电子运动时矿物质产生磁性的本质原因。磁场的产生是由于电子运动产生了分子环流。电子的运动包括两个部分,一是绕核运动,二是自身的自旋。物质之所以能产生磁性,主要源于第二种运动。未磁化的矿物质对外不显示磁性,其内部磁矩的取向是杂乱的。当矿物质受到外界磁场磁化时,其对外表现出磁性,主要由于磁化后内部磁矩有规则排列。
[0102]
矿物质按照性质可以分为两种,抗磁性物质和顺磁性物质(铁磁性物质是顺磁性物质的特殊情况),其中,
[0103]
i.抗磁性物质指的是磁化率为负值的物质,其电子总磁矩为零。当抗磁性物质受到外界磁场作用后,其内部产生的与外界磁化磁场方向相反的磁矩,对外界表现出抗磁性的性质。常见的抗磁性物质包括方铅矿、长石等;
[0104]
ii.顺磁性物质指的是在施加外界磁场后,顺磁性物质受到外界磁场磁化,物质内部产生与外界磁化磁场方向相同的磁矩。常见的顺磁性物质包括黑钨矿、黄铁矿、镍、钴等矿物;
[0105]
iii.铁磁性物质自身就具有很强的磁性,是顺磁性物质。受到外界磁场磁化后,产生的磁化强度很大。即使撤去外加磁化磁场后,仍然会保留一定强度的剩余磁场,常见的铁磁性物质有磁铁矿等;
[0106]
这些物质在地磁场的磁化作用下,对外表现出磁性。抗磁性物质受到地磁场磁化后,其磁矩与地磁场磁矩相反;顺磁性物质受到地磁场磁化后,其磁矩与地磁场磁矩相同。在我们确定勘探的目标矿物时,就可以确定其是抗磁性物质还是顺磁性物质,从而便可以唯一确定其磁矩与地磁场方向的关系,又因为勘测地点的地磁场方向可以通过多种方式获得(例如igrf模型等),我们便可以得到目标矿物的磁矩的确切方向。
[0107]
步骤s9:根据磁异常的磁矩矢量所在象限,获取所述磁矩矢量m的方向;
[0108]
具体地,如图3所示,作为示例,所述磁异常的磁矩矢量,通过物质的顺磁性或者抗磁性获取,三个所述虚解和一个所述真值组成的四个解中,每个解的所述磁矩矢量方向各不相同,确定磁异常的磁矩方向后,通过所述磁矩矢量与所述位置矢量夹角的余弦值,获取所述磁矩矢量对应的位置矢量,进而去除虚解,得到所述真值310,完成所述快捷去除虚解的全张量定位方法,其中,所述真值为所述磁源b的所述磁矩矢量和所述位置位置矢量的组合。
[0109]
实施例二
[0110]
如图4所示,本实施例提供了一种快捷去除虚解的全张量定位装置,用于实现实施例一提供的所述快捷去除虚解的全张量定位方法,所述快捷去除虚解的全张量定位装置包括:
[0111]
定位器件410,用于获取磁源位置信息,所述定位器件410包括但不限于北斗定位器件、gps器件、伽利略定位器件,任意可作为定位的器件均适用,在此不一一赘述;全张量磁梯度测量组件440,对磁源进行梯度测量,以获得磁源的全张量磁梯度矩阵;杜瓦430,所述杜瓦430内部用于存储低温介质,所述全张量磁梯度测量组件440设置于所述杜瓦430内部的低温环境介质中;测控系统420,用于获取所述定位器件410、所述全张量磁梯度测量组件440的测量信息。
[0112]
需要说明的是,图4只是给出了所述快捷去除虚解的全张量定位装置的一种安装方式,在使用中,应根据实际场景进行设置。
[0113]
具体地,如图5所示,所述测控系统420由电源管理模块421、定位与惯导模块422、杜瓦压强监测模块423、低温介质监测模块424、高度测量模块425、通信模块426。
[0114]
具体地,如图5所示,所述电源管理模块421用于将电源有效分配给所述测控系统420的除所述电源管理模块421以外的其他模块,所述电源管理模块421包括但不限于电池、车载电源、高压电源、军用电源、航空航天电源,任意可作为电源管理的模块均适用,在此不一一赘述。
[0115]
具体地,如图4和图5所示,所述定位与惯导模块422,用于获取所述全张量磁梯度矩阵的相似矩阵。
[0116]
具体地,如图4和图5所示,所述杜瓦压强监测模块423与所述低温介质监测模块424,用于获取所述杜瓦430的压强及温度信息。
[0117]
具体地,如图4和图5所示,所述高度管理模块425,用于所述快捷去除虚解的全张量定位装置的高度测量,获取所述快捷去除虚解的全张量定位装置的高度信息,所述高度信息包括但不限于地球大气层高度、星际空间高度,任意高度管理的模块均适用,在此不一一赘述。
[0118]
具体地,如图4和图5所示,所述通信管理模块426,用于和所述定位器件410、所述全张量磁梯度测量组件440、所述杜瓦430及外接设备进行信息通信;所述通信管理模块426用于传输所述磁源位置信息、所述全张量磁梯度矩阵、杜瓦信息,并将相关信息传输给外接设备,所述外接设备包括但不限于电脑、手机、平板、无人机,任意可与所述通信管理模块426进行信息传输的外接设备均适用,在此不一一赘述。
[0119]
具体地,如图4和如图6所示,所述全张量磁梯度测量组件440包括一个三轴磁强计
441和六个squid平面梯度计442;所述三轴磁强计441设置于正方体模块443的侧面;所述squid平面梯度计442设置于六棱台模块444的侧面;所述六棱台模块444的上表面和下表面为正六边形,所述六棱台模块444的侧面为等腰梯形;所述正方体模块443的下表面和所述六棱台模块444的上表面接触;所述三轴磁强计441用于测量地磁场三分量,与坐标系x轴、y轴及z轴三个方向一一对应,且要符合右手系,所述三轴磁强计441在所述立方体模块443的具体位置应根据实际场景进行设置,在此不一一赘述;所述squid平面梯度计442用于测量磁信号,所述squid平面梯度计442在所述六棱台模块444的具体位置应根据实际场景进行设置,六棱台上下表面和侧面的形状可根据实际场景进行设置,在此不一一赘述。
[0120]
具体地,如图4、图5及图6所示,所述定位器件410,将获取的位置信息传输至所述测控系统420;所述全张量磁梯度组件440将获取的磁场梯度信息传输至所述测控系统420,经过处理获取所述全张量磁梯度矩阵信息。
[0121]
综上所述,本发明提供一种快捷去除虚解的全张量定位方法及全张量定位装置,包括:进行梯度测量,获取全张量磁梯度矩阵g中五个独立分量,进而得到完整全张量磁梯度矩阵g;获得地磁方向信息;通过所述全张量磁梯度矩阵g,计算得到三个特征值,进而获取三个特征向量;根据磁源b中磁矩矢量m、位置矢量r与三个特征向量的关系,计算得到所述磁源b中所述位置矢量r与所述磁矩矢量夹角的余弦值;根据所述磁矩矢量m与所述位置矢量r的四种组合,得到四个解;根据磁异常的磁矩矢量所在象限,获取所述磁矩矢量m的方向;获取所述磁矩m对应的所述位置矢量r,进而去除虚解,得到真值,完成所述快捷去除虚解的全张量定位方法。本发明的快捷去除虚解的全张量定位方法,在明确勘测目标时,首先获取该位置处的地磁场方向,再通过目标的顺磁性或抗磁性,快捷地通过向量积获取目标磁源信息,从而完成目标磁异常的定位,该全张量定位方法,适合多种使用场景。本发明的快捷去除虚解的全张量定位装置,移动方便,系统分辨率高。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0122]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1