一种多船舶尾气排放污染物浓度的监测方法、终端及系统与流程
1.本发明属于船舶尾气排放监测技术领域,具体涉及一种多船舶尾气排放污染物浓度的监测方法、终端及系统。
背景技术:
2.随着《船舶大气污染物排放控制区实施方案》的出台,对船舶排放控制区进行了“扩容”,扩展到了内河;并要求通过提高船舶燃油标准、船机标准等措施,降低硫氧化物、氮氧化物、颗粒物以及挥发性有机物等大气污染物的排放。
3.船舶排放控制区实施方案的施行,需要有效的监测手段提供保障。目前的监测手段较为单一且低效,仅上船进行燃油硫含量的抽检,无法应对大量进出港船舶的有效监测。另外,现有的船舶尾气监测方法,主要包括以下两种:第一种是基于嗅探法的船舶尾气遥测方法,例如,公开号为cn113155921a的专利文献公开的一种嗅探式尾气遥测装置及方法。但是,遥测结果易受环境因素,如风向、风速、船舶航速、航向的影响,存在漏测、误测等缺陷。
4.第二种是基于光谱遥测技术的船舶尾气遥测方法,例如,公开号为cn112132385a的专利文献公开的一种内河船舶监测系统,其包括光谱法尾气分析仪。但尾气分析结果易受安装条件、测量距离过长(超过200m)导致co2饱和吸收等因素的影响;而且,上述两种船舶尾气遥测方法只能针对单只船舶的燃油硫含量监测,无法实现在实际情况中经常存在的测量区域内多艘船舶同时航行的监测需求;另外,对船舶尾气排放的硫氧化物、氮氧化物、碳氧化物等大气污染物的监测,也缺乏有效的手段。
技术实现要素:
5.基于现有技术中存在的上述缺点和不足,本发明的目的之一是至少解决现有技术中存在的上述问题之一或多个,换言之,本发明的目的之一是提供满足前述需求之一或多个的一种多船舶尾气排放污染物浓度的监测方法、终端及系统。
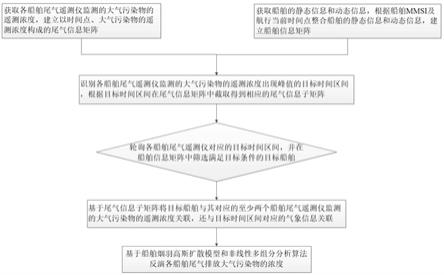
6.为了达到上述发明目的,本发明采用以下技术方案:一种多船舶尾气排放污染物浓度的监测方法,其特征在于,在船舶排放控制区内布设数个船舶尾气遥测仪,各船舶尾气遥测仪的遥测区域相互独立;所述监测方法包括以下步骤:s1、获取各船舶尾气遥测仪监测的大气污染物的遥测浓度,建立以时间点、大气污染物的遥测浓度构成的尾气信息矩阵;获取船舶的静态信息和动态信息,静态信息包括船舶mmsi和船舶固有参数,动态信息包括船舶mmsi、航行当前时间点、航速、航向和船舶坐标位置;根据船舶mmsi及航行当前时间点整合船舶的静态信息和动态信息,建立船舶信息矩阵;s2、识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间,根据目标时间区间在尾气信息矩阵中截取得到相应的尾气信息子矩阵;
s3、轮询各船舶尾气遥测仪对应的目标时间区间,并在船舶信息矩阵中筛选满足目标条件的目标船舶;s4、基于尾气信息子矩阵将目标船舶与其对应的至少两个船舶尾气遥测仪监测的大气污染物的遥测浓度关联,还与目标时间区间对应的气象信息关联;s5、基于船舶烟羽高斯扩散模型和非线性多组分分析算法反演各船舶尾气排放大气污染物的浓度。
7.作为优选方案,所述步骤s3中,目标条件包括条件(1)和条件(2):条件(1):条件(1):;t为船舶的航行当前时间点,δ为动态信息接收的最大时间,t
max
为目标时间区间的最大值,t
min
为目标时间区间的最小值;条件(2):船舶坐标位置与相应的船舶尾气遥测仪对射中点位置之间的距离小于相应的船舶尾气遥测仪的有效探测距离。
8.作为优选方案,所述步骤s3中,目标条件为:船舶坐标位置与相应的船舶尾气遥测仪对射中点位置之间的距离小于相应的船舶尾气遥测仪的有效探测距离。
9.作为优选方案,所述步骤s4中,气象信息包括当前环境风向、风速、温度、湿度和气压。
10.作为优选方案,所述步骤s5包括:根据接收的目标船舶的船舶坐标位置(x0,y0)、航向w、航速v,以大地坐标系表示,则t时刻目标船舶的航行点的位置坐标(x,y):将大地坐标系中的航行点的位置坐标转换为以船舶坐标位置(x0,y0)为原点、以下风向角为x轴、以横风向为y轴建立的风向坐标系中的航行点的位置坐标(x
′
,y
′
):其中,l为船舶尾气遥测仪的对射中点位置与目标船舶之间的距离,p为下风向角;假设目标船舶航行至t
n
时刻,基于高斯烟羽扩散模型,计算得到大气污染物的浓度为:其中,为船舶在t
i
时刻排放的大气污染物扩散至t
n
时刻任意一空间点处的浓度,q
i
为船舶在t
i
时刻排放的大气污染物的总量,分别为
方向上的扩散系数,u为风速,h为空间点离水面高度;获取目标时间区间内数个空间点的大气污染物的浓度并进行累加,然后与目标船舶对应的船舶尾气遥测仪监测大气污染物的遥测浓度建立非线性方程,利用非线性多组分分析算法反演出不同时刻下各目标船舶排放的大气污染物的浓度。
11.作为优选方案,所述非线性多组分分析算法为非线性最小二乘法或主成分分析法。
12.作为优选方案,所述大气污染物为硫氧化物、氮氧化物、碳氧化物或颗粒物。
13.作为优选方案,所述步骤s5之后,还包括以下步骤:s6、计算船舶的燃油硫含量;其中,c
s
为船舶的硫氧化物的浓度,c
c
为船舶的碳氧化物的浓度。
14.本发明还提供一种多船舶尾气排放污染物浓度的监测终端,包括:获取模块,用于获取各船舶尾气遥测仪监测的大气污染物的遥测浓度,建立以时间点、大气污染物的遥测浓度构成的尾气信息矩阵;还用于获取船舶的静态信息和动态信息,静态信息包括船舶mmsi和船舶固有参数,动态信息包括船舶mmsi、航行当前时间点、航速、航向和船舶坐标位置;根据船舶mmsi及航行当前时间点整合船舶的静态信息和动态信息,建立船舶信息矩阵;识别模块,用于识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间,根据目标时间区间在尾气信息矩阵中截取得到相应的尾气信息子矩阵;筛选模块,用于轮询各船舶尾气遥测仪对应的目标时间区间,并在船舶信息矩阵中筛选满足目标条件的目标船舶;关联模块,用于基于尾气信息子矩阵将目标船舶与其对应的至少两个船舶尾气遥测仪监测的大气污染物的遥测浓度关联,还用于与目标时间区间对应的气象信息关联;反演模块,用于基于船舶烟羽高斯扩散模型和非线性多组分分析算法反演各船舶尾气排放大气污染物的浓度。
15.本发明还提供一种多船舶尾气排放污染物浓度的监测系统,包括:数个船舶尾气遥测仪,布设于船舶排放控制区内;各船舶尾气遥测仪的遥测区域相互独立;如上方案所述的监测终端,与各船舶尾气遥测仪通讯连接;ais接收器,分别与船舶的ais发送器、监测终端通讯连接;气象分析仪,与监测终端通讯连接。
16.本发明与现有技术相比,有益效果是:(1)本发明实现船舶排放控制区内多只船舶航行过程中尾气排放污染物的浓度监测;相对于现有的单船监测技术,监测效率得到有效提升;(2)本发明根据目标时间区间在尾气信息矩阵中截取得到相应的尾气信息子矩阵,有效降低后续数据的处理量,提升数据处理的效率,降低对监测终端的数据处理能力的要求。
17.(3)本发明可实现各船舶尾气排放的硫氧化物、氮氧化物、碳氧化物等大气污染物浓度的监测,还能对船舶的燃油硫含量进行监测。
附图说明
18.图1是本发明实施例1的多船舶尾气排放污染物浓度的监测方法的流程图;图2是本发明实施例1的大地坐标系转换为风向坐标系的示意图;图3是本发明实施例1的多船舶尾气排放污染物浓度的监测终端的构架示意图;图4是本发明实施例1的多船舶尾气排放污染物浓度的监测系统的构架示意图;图5是本发明实施例1的多船舶尾气排放污染物浓度的监测系统应用于港口区域的平面布设示意图;图6是本发明实施例3的多船舶尾气排放污染物浓度的监测系统应用于内河区域的平面布设示意图。
具体实施方式
19.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
20.实施例1:本实施例在船舶排放控制区,以港口区域为例进行示例说明,布设r个船舶尾气遥测仪,各船舶尾气遥测仪的遥测区域相互独立。其中,r为大于1的整数。
21.如图1所示,本实施例的多船舶尾气排放污染物浓度的监测方法,包括以下步骤:s1、获取r个船舶尾气遥测仪监测的大气污染物的遥测浓度,建立以时间点、大气污染物的遥测浓度构成的数字型的尾气信息矩阵d1、d2、
…
、d
r
;其中,大气污染物的种类包括so2、co2、no
x
、pm等,船舶尾气遥测仪采集遥测浓度的时间一般为500ms,则尾气信息矩阵d
j
的表达式如下:其中,j=1,2,
…
,r,t
m,j
为第j个船舶尾气遥测仪监测的第m个时间点,m为大于1的整数;分别为第j个船舶尾气遥测仪在第m个时间点监测的co2、no
x
、so2、pm的遥测浓度。
22.通过ais接收器获取离散型的船舶通航的静态信息和动态信息,静态信息包括船舶mmsi和船舶固有参数(例如船名、船长、船舶类型、吃水深度、船舶主机功率信息等),动态信息包括船舶mmsi、航行当前时间点、航速、航向和船舶坐标位置等;根据静态信息的船舶mmsi与动态信息的船舶mmsi关联,以航行当前时间点整合船舶的静态信息和动态信息,建立船舶信息矩阵;其中,静态信息一般6min内接收到信息;动态信息根据航速不同,约在2~12s之间;考虑到同一只船舶通过船舶排放控制区的静态信息是恒定的,只需静态信息的船舶
mmsi与动态信息的船舶mmsi关联匹配,以航行当前时间点整合船舶的静态信息和动态信息,建立字符型的船舶信息矩阵k
ship1
、k
ship2
、
…
、k
shipm
,m为船舶排放控制区内的船舶数量。
23.s2、识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间t1、t2、
…
、t
r
,根据目标时间区间在尾气信息矩阵中截取得到相应的尾气信息子矩阵d
*1
、d
*2
、
…
、d
*r
;具体地,采用曼
‑
肯德尔趋势检验法识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间;其中,目标时间区间的确定,例如以遥测浓度出现峰值点的两侧的半高峰值点对应的时间点作为目标时间区间的两个端点。
24.s3、轮询各船舶尾气遥测仪对应的目标时间区间t
j
,并在船舶信息矩阵中筛选满足目标条件的目标船舶;另外,不满足目标条件的船舶的相关信息舍弃。
25.具体地,目标条件包括条件(1)和条件(2):条件(1):;t为船舶的航行当前时间点,δ为动态信息接收的最大时间,默认为12s;j=1,2,
…
,r;t
j,max
为目标时间区间t
j
的最大值,t
j,min
为目标时间区间t
j
的最小值。
26.条件(2):船舶坐标位置与相应的船舶尾气遥测仪对射中点位置之间的距离小于相应的船舶尾气遥测仪的有效探测距离。
27.其中,船舶尾气遥测仪的有效探测距离,其与气象信息中的风速和风向有关,一般在500~2000m;s4、基于尾气信息子矩阵将目标船舶与其对应的至少两个船舶尾气遥测仪监测的大气污染物的遥测浓度关联,还与目标时间区间对应的气象信息关联;其中,气象信息包括当前环境风向、风速、温度、湿度和气压等,通过气象分析仪即可获取。
28.另外,本实施例根据尾气信息子矩阵进行相关信息的关联,降低了数据处理量,提升了关联匹配的效率。
29.s5、基于船舶烟羽高斯扩散模型和非线性多组分分析算法反演各船舶尾气排放大气污染物的浓度。
30.具体地,根据ais接收器接收的目标船舶的船舶坐标位置(x0,y0)、航向w、航速v,以大地坐标系表示,则t时刻目标船舶的航行点的位置坐标(x,y):;如图2所示,将大地坐标系中的航行点的位置坐标转换为以船舶坐标位置(x0,y0)为原点、以下风向角为x轴、以横风向为y轴建立的风向坐标系中的航行点的位置坐标(x
′
,y
′
):其中,l为船舶尾气遥测仪的对射中点位置与目标船舶之间的距离,p为下风向角;假设目标船舶航行至t
n
时刻,基于高斯烟羽扩散模型,计算得到大气污染物的浓
度为:其中,为船舶在t
i
时刻排放的大气污染物扩散至t
n
时刻任意一空间点处的浓度,q
i
为船舶在t
i
时刻排放的大气污染物的总量,分别为方向上的扩散系数,u为风速,h为空间点离水面高度;获取目标时间区间内数个空间点的大气污染物的浓度并进行累加,然后与目标船舶对应的船舶尾气遥测仪监测大气污染物的遥测浓度建立非线性方程,利用非线性多组分分析算法反演出不同时刻下各目标船舶排放的大气污染物的浓度。
31.其中,目标时间区间,第f艘船舶排放的大气污染物对与之关联的船舶尾气遥测仪所监测的区域的浓度累加公式为:p为船舶尾气遥测仪所监测区域内以x轴方向等分间隔的个数,船舶尾气遥测仪主机和辅机之间距离一般为50~200m之间,以20cm为间隔,p一般为250~1000;q为船舶尾气遥测仪所监测区域内以y轴方向等分间隔的个数,船舶尾气遥测仪的y轴覆盖约为20~60m,以2cm为间隔,q一般为1000~3000。
32.以大气污染物so2为例,假设经过步骤s3的筛选之后,有k1艘目标船舶、k2个船舶尾气遥测仪满足目标条件,实际监测到的气体浓度分别为:,上述k2个船舶尾气遥测仪监测的so2浓度为上述k1艘目标船舶排放扩散到k2个船舶尾气遥测仪的遥测区域内的综合监测结果。
33.假设k1艘目标船舶排放的so2浓度分别为,则根据上述步骤s2获取到so2峰值半高宽的区间的多个点位数据,同时考虑到存在一定非线性关系,非线性多组分分析模型如下公式:根据非线性多组分分析算法,例如非线性最小二乘法、主成分分析法等,根据最大原则和典型相关度最大原则,反演出不同时刻的在船舶排放控制区内监测的每个船舶排放的so2浓度;以此类推,可得出船舶排放控制区内监测的每个船舶排放的co2浓度、no
x
浓度、pm浓度。
34.s6、计算各船舶的燃油硫含量;具体地,第f艘船舶的燃油硫含量。
35.其中,为第f艘船舶排放的so2浓度,为第f艘船舶排放的co2浓度。
36.相应地,如图3所示,本实施例的多船舶尾气排放污染物浓度的监测终端,包括:获取模块,获取r个船舶尾气遥测仪监测的大气污染物的遥测浓度,建立以时间点、大气污染物的遥测浓度构成的数字型的尾气信息矩阵d1、d2、
…
、d
r
;其中,大气污染物的种类包括so2、co2、no
x
、pm等,船舶尾气遥测仪采集遥测浓度的时间一般为500ms,则尾气信息矩阵d
j
的表达式如下:其中,j=1,2,
…
,r,t
m,j
为第j个船舶尾气遥测仪监测的第m个时间点,m为大于1的整数;分别为第j个船舶尾气遥测仪在第m个时间点监测的co2、no
x
、so2、pm的遥测浓度。
37.通过ais接收器获取离散型的船舶通航的静态信息和动态信息,静态信息包括船舶mmsi和船舶固有参数(例如船名、船长、船舶类型、吃水深度、船舶主机功率信息等),动态信息包括船舶mmsi、航行当前时间点、航速、航向和船舶坐标位置等;根据静态信息的船舶mmsi与动态信息的船舶mmsi关联,以航行当前时间点整合船舶的静态信息和动态信息,建立船舶信息矩阵;其中,静态信息一般6min内接收到信息;动态信息根据航速不同,约在2~12s之间;考虑到同一只船舶通过船舶排放控制区的静态信息是恒定的,只需根据静态信息的船舶mmsi与动态信息的船舶mmsi关联匹配,以航行当前时间点整合船舶的静态信息和动态信息,建立字符型的船舶信息矩阵k
ship1
、k
ship2
、
…
、k
shipm
,m为船舶排放控制区内的船舶数量;识别模块,用于识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间t1、t2、
…
、t
r
,根据目标时间区间在尾气信息矩阵中截取得到相应的尾气信息子矩阵d
*1
、d
*2
、
…
、d
*r
;具体地,采用曼
‑
肯德尔趋势检验法识别各船舶尾气遥测仪监测的大气污染物的遥测浓度出现峰值的目标时间区间;其中,目标时间区间的确定,例如以遥测浓度出现峰值点的两侧的半高峰值点对应的时间点作为目标时间区间的两个端点。
38.筛选模块,用于轮询各船舶尾气遥测仪对应的目标时间区间t
j
,并在船舶信息矩阵中筛选满足目标条件的目标船舶;另外,不满足目标条件的船舶的相关信息舍弃。
39.具体地,目标条件包括条件(1)和条件(2):条件(1):;t为船舶的航行当前时间点,δ为动态信息接收的最大时间,默认为12s;j=1,2,
…
,r;t
j,max
为目标时间区间t
j
的最大值,t
j,min
为目标时间区间t
j
的最小值。
40.条件(2):船舶坐标位置与相应的船舶尾气遥测仪对射中点位置之间的距离小于相应的船舶尾气遥测仪的有效探测距离。
41.其中,船舶尾气遥测仪的有效探测距离,其与气象信息中的风速和风向有关,一般
在500~2000m;关联模块,用于基于尾气信息子矩阵将目标船舶与其对应的至少两个船舶尾气遥测仪监测的大气污染物的遥测浓度关联,还用于与目标时间区间对应的气象信息关联;其中,气象信息包括当前环境风向、风速、温度、湿度和气压,通过气象分析仪即可获取。
42.反演模块,用于基于船舶烟羽高斯扩散模型和非线性多组分分析算法反演各船舶尾气排放大气污染物的浓度。
43.具体地,根据ais接收器接收的目标船舶的船舶坐标位置(x0,y0)、航向w、航速v,以大地坐标系表示,则t时刻目标船舶的航行点的位置坐标(x,y):;将大地坐标系中的航行点的位置坐标转换为以船舶坐标位置(x0,y0)为原点、以下风向角为x轴、以横风向为y轴建立的风向坐标系中的航行点的位置坐标(x
′
,y
′
):其中,l为船舶尾气遥测仪的对射中点位置与目标船舶之间的距离,p为下风向角;假设目标船舶航行至t
n
时刻,基于高斯烟羽扩散模型,计算得到大气污染物的浓度为:其中,为船舶在t
i
时刻排放的大气污染物扩散至t
n
时刻任意一空间点处的浓度,q
i
为船舶在t
i
时刻排放的大气污染物的总量,分别为方向上的扩散系数,u为风速,h为空间点离水面高度;获取目标时间区间内数个空间点的大气污染物的浓度并进行累加,然后与目标船舶对应的船舶尾气遥测仪监测大气污染物的遥测浓度建立非线性方程,利用非线性多组分分析算法反演出不同时刻下各目标船舶排放的大气污染物的浓度。
44.其中,目标时间区间,第f艘船舶排放的大气污染物对与之关联的船舶尾气遥测仪所监测的区域的浓度累加公式为:p为船舶尾气遥测仪所监测区域内以x轴方向等分间隔的个数,船舶尾气遥测仪主机和辅机之间距离一般为50~200m之间,以20cm为间隔,p一般为250~1000;q为船舶尾气遥测仪所监测区域内以y轴方向等分间隔的个数,船舶尾气遥测仪的y轴覆盖约为20~60m,以2cm为间隔,q一般为1000~3000。
45.以大气污染物so2为例,假设经过步骤s3的筛选之后,有k1艘目标船舶、k2个船舶尾
气遥测仪满足目标条件,实际监测到的气体浓度分别为:,上述k2个船舶尾气遥测仪监测的so2浓度为上述k1艘目标船舶排放扩散到k2个船舶尾气遥测仪的遥测区域内的综合监测结果。
46.假设k1艘目标船舶排放的so2浓度分别为,则根据上述步骤s2获取到so2峰值半高宽的区间的多个点位数据,同时考虑到存在一定非线性关系,非线性多组分分析模型如下公式:根据非线性多组分分析算法,例如非线性最小二乘法、主成分分析法等,根据最大原则和典型相关度最大原则,反演出不同时刻的在船舶排放控制区内监测的每个船舶排放的so2浓度;以此类推,可得出船舶排放控制区内监测的每个船舶排放的co2浓度、no
x
浓度、pm浓度。
47.反演模块还用于计算各船舶的燃油硫含量;具体地,第f艘船舶的燃油硫含量。
48.其中,为第f艘船舶排放的so2浓度,为第f艘船舶排放的co2浓度。
49.如图4和5所示,本实施例的多船舶尾气排放污染物浓度的监测系统,布设于港口区域,包括:r个船舶尾气遥测仪1,布设于船舶排放控制区内;各船舶尾气遥测仪的遥测区域相互独立;本实施例的监测终端2,与各船舶尾气遥测仪通讯连接;ais接收器3,分别与各船舶0的ais发送器、监测终端通讯连接;ais接收器用于接收船舶排放控制区内的各船舶通航的静态信息和动态信息;气象分析仪4,与监测终端通讯连接;气象分析仪用于获取气象信息,包括当前环境风向、风速、温度、湿度和气压等。
50.另外,监测终端还可与云端服务器通讯连接,实现远程监测。
51.实施例2:本实施例的多船舶尾气排放污染物浓度的监测方法与实施例1的不同之处在于:目标条件仅保留条件(2),满足不同应用的需求;即本实施例的目标条件为:船舶坐标位置与相应的船舶尾气遥测仪对射中点位置之间的距离小于相应的船舶尾气遥测仪的有效探测距离;其中,船舶尾气遥测仪的有效探测距离,其与气象信息中的风速和风向有关,一般在500~2000m。
52.其他步骤可以参考实施例1。
53.相应地,监测终端以及监测系统作相应的调整。
54.实施例3:本实施例的多船舶尾气排放污染物浓度的监测方法与实施例1的不同之处在于:
监测方法应用于内河区域,各船舶尾气遥测仪的布设如图6所示;其他步骤可以参考实施例1。
55.以上所述仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1