一种钢结构检测设备及使用该设备的检测方法与流程
1.本技术涉及钢结构生产的技术领域,尤其是涉及一种钢结构检测设备及使用该设备的检测方法。
背景技术:
2.钢结构工程是以钢材制作为主的结构,主要由型钢和钢板等制成的钢梁、钢柱、钢桁架等构件组成,各构件或部件之间通常采用焊缝、螺栓或铆钉连接,是主要的建筑结构类型之一;因其自重较轻,且施工简便,广泛应用于大型厂房、桥梁、场馆、超高层等领域。
3.焊缝连接和螺栓连接是钢结构工程构件连接的两种主要方式,其中,以焊缝连接在钢结构中施工中的工作量最大,也最易于出现问题,如何保证焊缝连接的质量,对焊接施工进行有效的检测,是钢结构工程质量控制的重中之重;目前,用于钢结构无损探伤的方法主要有:渗透检测、射线检测、超声检测等,以超声检测在实际的应用工程中最为普遍,而超声检测时需要添加耦合剂用于排除探头和被测物之间的空气,使超声波能有效地穿入工件达到检测目的。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:对钢结构焊缝进行检测时,需要人工先将耦合剂添加到焊缝上,然后手持探头移动来对焊缝检测,而人工添加耦合剂位置和数量均不确定,而且还会出现耦合剂添加不均匀而使得局部焊缝上的耦合剂过少的情况,同时人工移动探头检测时探头移动的位置也不能确定,因此导致探头对焊缝的检测精度较低。
技术实现要素:
5.为了提高探头对焊缝的检测精度,本技术提供了一种钢结构检测设备及使用该设备的检测方法。
6.第一方面,本技术提供的一种钢结构检测设备,采用如下的技术方案:一种钢结构检测设备,包括机架、设置在机架上的检测装置,所述检测装置包括;滑移块,所述滑移块设置在机架上且探头设置滑移块上;驱动机构,所述驱动机构设置在机架上且用于驱动滑移块移动;添加机构,所述添加机构设置在滑移块上且用于向钢结构焊缝上添加耦合剂;夹持机构,所述夹持机构设置在机架上且用于夹持钢结构。
7.通过采用上述技术方案,将钢结构放置到机架上,夹持机构启动夹持钢结构,添加机构将耦合剂添加到焊缝上,驱动机构启动带动滑移块移动,滑移块移动带动探头移动,探头抵触到焊缝上的耦合剂上,探头对焊缝进行检测,因此根据焊缝的位置确定耦合剂添加的位置和数量,降低了人工添加耦合剂时出现位置不对的情况,也降低了因添加耦合剂添加不均匀而出现局部焊缝上耦合剂添加过少情况的概率,同时保持探头与焊缝位置一定,以此来提高了探头对焊缝的检测精度,同时也降低了人工耦合剂添加过多而造成耦合剂浪费的概率。
8.可选的,所述驱动机构包括;滑移板,所述滑移板滑移设置在机架上且滑移块滑移设置在滑移板上,所述滑移板和滑移块的滑移方向垂直;转动螺杆,所述转动螺杆转动设置在机架上且与滑移板螺纹连接;驱动电机,所述驱动电机设置在机架上且与转动螺杆连接;升降螺杆,所述升降螺杆转动设置在滑移板上且与滑移块螺纹连接;升降电机,所述升降电机设置在滑移板上且与升降螺杆连接;距离检测仪,所述距离检测仪设置在滑移块上且用于检测探头与位于探头一侧钢结构之间的距离并与升降电机电连接。
9.通过采用上述技术方案,转动电机启动带动转动螺杆转动,转动螺杆转动带动滑移块和探头移动,探头对焊缝进行检测,同时距离检测仪检测位于染头一侧的钢结构与探头之间的距离,距离检测仪控制升降电机启动带动升降螺杆转动,升降螺杆转动带动滑移块和探头移动,以此来使得探头与焊缝之间保持探头检测的合适的距离,从而进一步提高了对焊缝的检测精度。
10.可选的,所述添加机构包括;容纳箱,所述容纳箱设置有滑移块上且盛放有耦合剂;输送管,所述输送管设置在容纳箱上且设置有朝向焊缝的添加管,所述添加管上设置有呈扁平状且长度方向覆盖焊缝宽度方向的扁平端,所述输送管上设置有控制阀;稳压泵,所述稳压泵设置在容纳箱内且与容纳箱内连通;压力检测仪,所述压力检测仪设置在容纳箱内且用于检测容纳箱内压力并与稳压泵电连接。
11.通过采用上述技术方案,压力检测仪检测容纳箱内压力,压力检测仪控制稳压泵用于维持容纳箱内压力,耦合剂在压力作用下通过输送管、添加管和扁平端添加到焊缝上,以此来实现将耦合剂添加到焊缝上,无需添加耦合剂时,关闭控制阀,压力检测仪检测压力不变,稳压泵自动停止运行,无需人工关闭稳压泵,降低了稳压泵运行而能量的损耗;同时扁平端长度方向覆盖焊缝的宽度方向,因此添加耦合剂时只需滑移块带动扁平端沿焊缝长度方向移动,从而缩短了添加耦合剂所花费的时间,提高了对钢结构检测的效率。
12.可选的,所述夹持机构设置有两个且位于钢结构的两侧,所述夹持机构包括;夹持气缸,所述夹持气缸设置在机架上;安装块,所述安装块设置在夹持气缸活塞杆上;两个夹持板,两个所述夹持板设置在安装块上且远离安装块一端的距离大于靠近安装块一端的距离并抵紧在钢结构上。
13.通过采用上述技术方案,夹持气缸启动带动安装块移动,安装块移动带动两个夹紧板靠近钢结构,因此两个安装块上的四个夹紧板配合夹紧钢结构,同时也降低了钢结构在夹持板上发生移动的概率,提高了夹持机构对钢结构的定位效果。
14.可选的,所述机架上设置有对钢结构进行输送的输送装置,所述输送装置包括;支撑杆,所述支撑杆设置在机架上且钢结构放置在支撑杆上;输送气缸,所述输送气缸设置在机架上;推板,所述推板设置在输送气缸活塞杆上且与钢结构接触,所述推板上设置有用
于支撑钢结构的放置板,所述放置板上设置有对钢结构进行定位的定位块;定位板,所述定位板设置机架上且钢结构在推板推动下抵触到定位板上进行定位。
15.人工在放置钢结构时每次放置的位置不一,因此会出现钢结构的位置和探头相互错位的情况,从而降低了探头对钢结构的检测精度;通过采用上述技术方案,将钢结构一端放置到支撑杆上,然后将钢结构另一端放置到放置板上且抵触到推板上,推动钢结构抵触到定位块上进行定位,然后输送气缸启动带动推板移动,推板移动带动钢结构朝向检测装置移动,钢结构抵触到定位板上进行定位,然后输送气缸启动带动推板和定位块回移,以此来降低了钢结构与探头相互错位的情况,提高了探头对钢结构的检测精度。
16.可选的,所述机架上设置有对钢结构焊缝进行清理的清理装置,所述清理装置包括;清理管,所述清理管设置在机架上且开设有进气腔,所述清理管内侧壁上沿清理管轴线阵列设置开设有多个与进气腔连通的出气孔,且所述出气孔绕清理管轴线圆周阵列设置有多个并呈倾斜状态;鼓风机,所述鼓风机设置在机架上且设置有与进气腔连通的进气管,所述钢结构进行输送时穿过清理管且气体通过出气孔对焊缝进行清理使得杂质从清理管远离检测装置一端移出。
17.空气中杂质容易附着在焊缝上,因此这些杂质在检测会混入耦合剂中,从而降低了探头对钢结构的检测精度;通过采用上述技术方案,鼓风机启动,气体通过进气管进入进气腔内,最后气体通过出气孔输出对焊缝上的杂质进行清理,从而降低了杂质混入耦合剂中的概率,提高了探头对钢结构的检测精度;同时倾斜的出气孔使得脱离焊缝上的杂质从清理管远离检测装置的一端移动,因此降低了飘散的杂质继续附着到焊缝上的概率,进一步提高了探头对钢结构的检测精度。
18.可选的,所述机架上设置有对鼓风机进行控制的控制装置,所述控制装置包括;感应板,所述感应板设置在推板上;红外感应器,所述红外感应器设置在机架上且与鼓风机电连接,当所述推板推动钢结构焊缝进入清理管时,所述感应板与红外感应器感应使得鼓风机启动运行,而所述推板推动钢结构焊缝离开清理管时,所述感应板与红外感应器感应使得鼓风机停止运行。
19.通过采用上述技术方案,推板移动带动感应板和钢结构移动,钢结构上焊缝进入清理管内时,感应板与红外感应器感应,红外感应器控制鼓风机启动对钢结构进行清理,而钢结构上焊缝脱离清理管后,感应板与红外感应器脱离,红外感应器控制鼓风机停止运行,降低了无需对焊缝进行清理时鼓风机依然运行的概率,从而在保证对焊缝进行清理的同时也节省了能源。
20.可选的,所述机架转动设置有转动环,两个所述夹持机构设置在转动环上,所述支撑杆设置在转动环上且定位板位于支撑杆上,所述机架上设置有驱动转动环转动的转动装置。
21.钢结构中存在多个空心钢管连接的焊缝,因此钢管的空心部分会对探头检测产生
不利影响,因此有必要对钢结构进行转动检测,以此来提高探头对钢结构的检测精度;通过采用上述技术方案,转动装置启动带动转动环转动,转动环转动带动钢结构、夹持机构、定位板和支撑杆转动一圈后完成转动,钢结构转动时,探头对焊缝进行检测,以此来提高了探头对钢结构的检测精度。
22.可选的,所述转动装置包括;第一齿轮,所述第一齿轮设置在转动环外侧壁上且钢结构穿过转动环;转动电机,所述转动电机设置在机架上;第二齿轮,所述第二齿轮设置在转动电机输出轴上且与第一齿轮啮合。
23.通过采用上述技术方案,转动电机启动带动第二齿轮转动,第二齿轮转动带动第一齿轮转动,第一齿轮转动带动转动环转动一圈,以此来实现转动电机启动带动转动环转动一圈。
24.第二方面,本技术提供的一种钢结构检测方法,采用如下的技术方案:一种钢结构检测方法,包括以下步骤;包括以下步骤;s1、对钢结构焊缝按要求不同进行分类,分为一级焊缝、二级焊缝和三级焊缝;s2、对三种类别的焊缝先进行外观检测,然后根据不同类别需求将钢结构放置到如第一方面中任意一项所述的检测设备上,检测设备对钢结构焊缝进行检测;s3、记录检测结果;s4、根据不同检测结果对钢结构进行标记。
25.通过采用上述技术方案,先对钢结构焊缝分为一级焊缝、二级焊缝和三级焊缝三种类别,对三种钢结构焊缝进行外观检测,然后将钢结构放置到检测设备上,检测设备根据不同检测要求对钢结构焊缝进行检测,对检测出的钢结构数据进行记录,最后对钢结构进行标记合格和不合格,以此来完成对钢结构的检测。
26.综上所述,本技术包括以下至少一种有益技术效果:1.通过将钢结构放置到机架上,夹持机构启动夹持钢结构,添加机构将耦合剂添加到焊缝上,驱动机构启动带动探头移动抵触到耦合剂上,因此探头对焊缝进行检测,从而降低了人工添加耦合剂时出现位置不对的情况,同时保持探头与焊缝位置一定,以此来提高了探头对焊缝的检测精度;2.通过鼓风机启动,气体出气孔输出对焊缝上的杂质进行清理,从而降低了杂质混入耦合剂中的概率,提高了探头对钢结构的检测精度;同时倾斜的出气孔使得脱离焊缝上的杂质从清理管远离检测装置的一端移动,因此降低了飘散的杂质继续附着到焊缝上的概率,进一步提高了探头对钢结构的检测精度;3.通过推板移动带动感应板,钢结构上焊缝进入清理管内时,红外感应器控制鼓风机启动对钢结构进行清理,而钢结构上焊缝脱离清理管后,红外感应器控制鼓风机停止运行,降低了无需对焊缝进行清理时鼓风机依然运行的概率,从而在保证对焊缝进行清理的同时也节省了能源。
附图说明
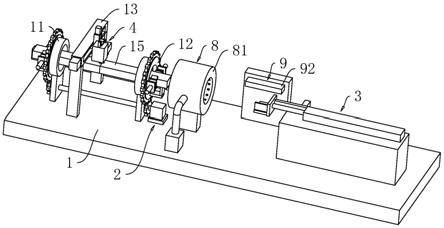
27.图1是本技术的立体结构示意图;
图2是本技术中夹持机构的结构示意图;图3是本技术的局部结构示意图,主要展示夹持机构;图4是本技术中输送装置、清理装置和控制装置的结构示意图;图5是申请中清理装置的结构示意图,其中对清理管侧壁进行了剖视;图6是本技术中检测装置的结构示意图;图7是本技术中驱动机构的结构示意图;图8是本技术中添加机构的结构示意图,其中对容纳箱侧壁进行了剖视。
28.附图标记:1、机架;11、固定环;12、转动环;13、支撑架;131、移动槽;14、探头;15、钢结构;2、转动装置;21、第一齿轮;22、转动电机;23、第二齿轮;24、安装轴;3、输送装置;31、支撑杆;32、输送气缸;33、推板;34、定位板;35、连接杆;36、放置板;37、定位块;4、检测装置;41、滑移块;5、驱动机构;51、滑移板;511、滑动槽;52、转动螺杆;53、驱动电机;54、升降螺杆;55、升降电机;56、距离检测仪;57、滑移槽;6、添加机构;61、容纳箱;62、输送管;621、控制阀;622、添加管;623、扁平端;63、稳压泵;631、进气管;64、压力检测仪;65、加入管;66、控制开关;7、夹持机构;71、夹持气缸;72、安装块;73、夹持板;8、清理装置;81、清理管;82、鼓风机;821、输气管;83、进气腔;84、出气孔;9、控制装置;91、感应板;92、红外感应器;93、连接板;94、支撑板。
具体实施方式
29.以下结合附图对1
‑
8对本技术作进一步详细说明。
30.本技术实施例公开一种钢结构检测设备。
31.本实施例中距离检测仪56型号为e3jk
‑
dr11、压力检测仪64型号为sin
‑
p300、红外感应器92型号为tb12j
‑
d15n1。
32.参照图1,钢结构检测设备包括机架1、设置在机架1上且用于对钢结构15焊缝进行检测的检测装置4,机架1上设置有对钢结构15进行输送的输送装置3。
33.参照图1和图2,机架1上表面上固定安装有两个水平间隔设置的固定环11,且固定环11相背两侧壁上均转动安装有转动环12,同时固定环11和转动环12的轴线重合且呈水平状态,同时固定环11和转动环12内环直径相同,同时转动环12外径大于固定环11外径。
34.参照图1和图2,机架1上设置有驱动转动环12转动的转动装置2,转动装置2包括第一齿轮21、转动电机22和第二齿轮23,第一齿轮21设置有两个且分别同轴固定安装在两个转动环12外环面上;机架1上且位于第一齿轮21下方转动安装有水平的安装轴24,且安装轴24和转动环12轴线平行。
35.参照图2和图3,驱动电机53固定安装在机架1上且输出轴与安装轴24连接,第二齿轮23设置有两个且键连接在安装轴24上,同时两个第二齿轮23分别与两个第一齿轮21啮合;驱动电机53启动带动安装轴24和两个第二齿轮23转动,两个第二齿轮23转动带动两个第一齿轮21和两个转动环12同时转动。
36.参照图3和图4,输送装置3包括支撑杆31、输送气缸32、推板33和定位板34,两个转动环12相背两侧壁上且位于转动环12轴线下方均固定安装有连接杆35,连接杆35呈水平状态且长度方向和转动环12轴线平行;支撑杆31设置有两个且分别固定安装在两个连接杆35相背的一端上,同时支撑杆31竖直向上;钢结构15的两端放置在两个支撑杆31的上表面上,
同时钢结构15两端面中心连线与转动环12轴线重合,且钢结构15焊缝位于两个转动环12之间。
37.参照图1和图4,输送气缸32固定安装在机架1上表面上,且输送气缸32位于两个转动环12一侧,同时输送气缸32活塞杆和转动环12轴线重合且伸至靠近转动环12一侧;推板33固定安装在输送气缸32活塞杆上且呈竖直状态,推板33靠近支撑杆31一侧的侧壁上固定安装有支撑钢结构15的放置板36,放置板36上表面上固定安装有对钢结构15进行定位的定位块37。
38.参照图3和图4,当对钢结构15进行输送时,钢结构15一端放置在靠近推板33一侧的支撑杆31上表面上,而钢结构15另一端放置在放置板36上表面上且推板33抵触,同时钢结构15侧壁抵触到定位块37上进行定位;钢结构15放置完成后,输送气缸32启动带动推板33移动,推板33推动钢结构15穿过两个转动环12与定位板34抵触,然后输送气缸32启动带动推板33回移,以此来实现钢结构15的输送。
39.参照图1和图4,检测装置4位于两个转动环12之间,机架1上且位于两个转动环12与推板33之间设置有清理装置8,清理装置8用于对检测前的钢结构15焊缝进行清理;清理装置8包括清理管81和鼓风机82,清理管81固定安装在机架1上且位于两个转动环12和推板33之间,同时清理管81和转动环12的轴线重合,且清理管81和转动环12内径相同;而鼓风机82固定安装在机架1上表面上且位于清理管81一侧。
40.参照图3和图4,当放置钢结构15进行输送时,钢结构15一端穿过清理管81放置到支撑杆31上表面上,而钢结构15另一端抵触到推板33上,而钢结构15上的焊缝位于清理管81远离转动环12一侧。
41.参照图4和图5,清理管81内开设有环形的进气腔83,鼓风机82上固定安装有与清理管81外侧壁固定连接的输气管821,同时输气管821与进气腔83连通使得气体进入进气腔83内;清理管81内侧壁上沿清理管81轴线阵列设置有多个出气孔84,且出气孔84也绕清理管81轴线圆周阵列设置有多个,同时出气孔84呈倾斜状态且与进气腔83连通,气体通过出气孔84对焊缝上杂质进行清理,使得杂质从清理管81远离检测装置4一端移出。
42.参照图1和图4,机架1上设置有控制鼓风机82启停的控制装置9,控制装置9包括感应板91、红外感应器92,推板33背离清理管81一侧的侧壁上固定安装有连接板93,且连接板93长度方向与输送气缸32活塞杆轴线平行;感应板91固定安装在连接板93远离推板33的一端上,且感应板91位于连接板93背离输送气缸32一侧。
43.参照图1和图4,机架1上表面上且位于输送气缸32一侧固定安装有竖直的支撑板94,红外感应器92固定安装在支撑板94靠近感应板91一侧的侧壁上,且红外感应器92与感应板91处于同一水平面上;支撑板94上固定安装有控制鼓风机82启停的控制盒,红外感应器92与控制盒电连接;当推板33带动钢结构15上焊缝进入清理管81时,感应板91与红外感应器92感应控制鼓风机82启动,而推板33带动钢结构15上焊缝输出清理管81时,感应板91与红外感应器92脱离,红外感应器92控制鼓风机82停止运行。
44.参照图1和图6,检测装置4包括滑移块41、驱动机构5,机架1上表面上且位于两个转动环12之间固定安装有支撑架13,同时支撑架13伸至钢结构15上方;滑移块41滑移安装在支撑架13上,而超声波检测仪的探头14固定安装在滑移块41上,且探头14竖直向下并与
钢结构15的焊缝对应设置,同时探头14对焊缝进行检测;驱动机构5设置在支撑架13上,且驱动机构5用于驱动滑移块41移动。
45.参照图6和图7,驱动机构5包括滑移板51、转动螺杆52、驱动电机53、升降螺杆54、升降电机55和距离检测仪56,支撑架13上开设有移动槽131,滑移板51水平滑移安装在移动槽131上,且滑移板51滑移方向与转动环12轴线垂直并和焊缝长度方向平行,同时滑移板51位于钢结构15上方;转动螺杆52转动安装在移动槽131上,且转动螺杆52与滑移板51螺纹连接并呈水平状态,驱动电机53固定安装在支撑架13上,且驱动电机53输出轴与转动螺杆52连接。
46.参照图6和图7,滑移板51背离移动槽131一侧的侧壁上开设有竖向的滑动槽511,滑移块41竖向滑移安装在滑移槽57上,且探头14位于滑移块41远离滑移槽57的一端上。升降螺杆54转动安装在滑动槽511上,且升降螺杆54与滑移块41螺纹连接并呈竖直状态,升降电机55固定安装在滑移板51顶端上且与升降螺杆54连接;距离检测仪56固定安装在滑移块41下表面上,且距离检测仪56位于探头14的一侧,同时距离检测仪56用于检测探头14与位于探头14一侧的钢结构15之间的距离,且滑移块41移动使得距离检测仪56与钢结构15脱离时,探头14与焊缝脱离。
47.参照图6和图7,距离检测仪56检测探头14与位于探头14一侧的钢结构15之间的距离,距离检测仪56控制升降电机55启动带动升降螺杆54转动,升降螺杆54转动带动滑移块41和探头14移动,使得探头14与焊缝之间保持指定的距离,然后驱动电机53启动带动转动螺杆52转动,转动螺杆52转动带动滑移板51和探头14一起移动。
48.参照图6和图8,检测装置4还包括添加机构6,添加机构6设置在滑移块41上,且添加机构6用于向钢结构15焊缝上添加耦合剂;添加机构6包括容纳箱61、输送管62、稳压泵63、压力检测仪64,容纳箱61固定安装在滑移块41与滑移板51滑移方向垂直的侧壁上且装有耦合剂,同时容纳箱61上表面上固定安装有加入管65,加入管65用于向容纳箱61内添加耦合剂,且加入管65上固定安装有控制开闭的控制开关66。
49.参照图6和图8,输送管62固定安装在容纳箱61下表面上,且输送管62与容纳箱61内连通并竖直向下设置,同时输送管62上固定安装有控制阀621;输送管62底端一体设置有倾斜向下且朝向探头14的添加管622,添加管622远离输送管62的一端一体设置有呈扁平状的扁平端623,且扁平端623长度方向与焊缝的宽度方向垂直,同时扁平端623长度方向覆盖焊缝的宽度方向,容纳箱61内的耦合剂通过输送管62和添加管622添加到位于探头14正下方的焊缝上,使得耦合剂覆盖焊缝的宽度方向,探头14检测时与耦合剂接触。
50.参照图6和图8,稳压泵63固定安装在容纳箱61上表面上,且稳压泵63上固定安装有与容纳箱61上表面固定连接的进气管631,同时进气管631与容纳箱61内连通;压力检测仪64固定安装在容纳箱61内顶壁上,且压力检测仪64位于容纳箱61内耦合剂上方,压力检测仪64检测容纳箱61内压力,容纳箱61上表面上固定安装有控制稳压泵63的控制箱,压力检测仪64与控制箱电连接,压力检测仪64检测容纳箱61内压力。
51.参照图6和图8,控制阀621打开,耦合剂在容纳箱61内压力作用下依次通过输送管62、添加管622和扁平端623添加到位于探头14正下方的焊缝上,而耦合剂减少后容纳箱61内压力变小,压力检测仪64控制稳压泵63启动,气体通过进气管631进入容纳箱61内,以此来维持容纳箱61内压力,从而实现持续向焊缝上添加耦合剂,添加完成后,控制阀621关闭,
而容纳箱61内压力不变后,压力检测仪64控制稳压泵63关闭运行。
52.参照图1和图2,检测装置4还包括夹持机构7,夹持机构7设置在两个且位于两个转动环12相背一侧的侧壁上,同时夹持机构7用于夹持钢结构15;每个转动环12上的夹持机构7均设置有两个且位于钢结构15水平方向上的两侧,夹持机构7包括夹持气缸71、安装块72和两个夹持板73,夹持气缸71固定安装在转动环12侧壁上,且夹持气缸71活塞杆水平伸至靠近钢结构15一侧。
53.参照图2和图3,安装块72固定安装在夹持气缸71活塞杆上,两个夹持板73固定安装在安装块72靠近钢结构15一侧的侧壁上,且两个夹持板73上下间隔设置,同时两个夹持板73远离安装块72的一端倾斜伸至钢结构15上下两侧,两个夹持板73远离安装块72的一端之间的距离大于靠近安装块72一端之间的距离;两个夹持气缸71启动带动两个安装块72上的四个夹持板73抵紧在钢结构15上,以此来对钢结构15进行定位。
54.本技术实施例的工作原理为:将钢结构15一端穿过清理管81放置到靠近推板33一侧的支撑杆31上,而将钢结构15另一端放置到放置板36上且抵触在推板33上,同时推动钢结构15使得钢结构15侧壁与定位块37抵触,输送气缸32启动带动推板33和感应板91移动,推板33推动钢结构15移动使得焊缝进入清理管81内,推板33移动使得红外感应器91通电运行。
55.感应板91感应红外感应器92控制鼓风机82启动,气体通过出气孔84吹动在焊缝上,使得焊缝上杂质移至清理管81,而焊缝移出清理管81时,感应板91与红外感应器92脱离控制鼓风机82停止运行,接着红外感应器92断电停止运行,推板33推动钢结构15与定位板34抵触,输送气缸32启动带动推板33回移到原位,以此来对钢结构15进行输送并对钢结构15焊缝上杂质进行清理。
56.控制阀621打开,耦合剂在压力作用下通过输送管62、添加管622和添加管622添加到位于探头14正下方的焊缝上,同时距离检测仪56控制升降电机55启动带动滑移块41和探头14移动,使得探头14与焊缝之间保持指定的距离,然后转动电机22启动带动探头14一起移动,探头14与耦合剂接触后对焊缝进行检测,以此来实现对焊缝进行检测。
57.当需要转动对钢结构15上焊缝进行检测时,转动电机22启动带动转动环12和钢结构15转动一圈,探头14对焊缝进行检测,且当钢结构15转动时,探头14与焊缝之间保持相同的距离,以此来提高了对焊缝的检测精度;检测完成后,控制阀621关闭,压力检测仪64检测压力不变后控制稳压泵63停止工作。
58.本技术实施例公开一种检测方法。
59.参照图1,检测方法包括以下步骤;s1、对钢结构15焊缝按要求不同进行分类,分为一级焊缝、二级焊缝和三级焊缝,三种类别的焊缝均需要进行外观检测;s2、对三种类别的焊缝先进行外观检测,而二级焊缝需要对焊缝长度的20%进行超声波仪检测,三级焊缝需要对焊缝长度的100%进行超声波仪检测;因此根据不同类别需求将钢结构15放置到检测设备上,检测设备启动对钢结构15焊缝进行检测;s3、记录检测结果;s4、根据不同检测结果对钢结构15进行标记,将钢结构15标记为合格和不合格两种标记。
60.本技术实施例的工作原理为:先对钢结构15焊缝分为一级焊缝、二级焊缝和三级焊缝三种类别,对三种钢结构15焊缝进行外观检测,然后将钢结构15放置到检测设备上,检测设备根据焊缝长度检测要求对钢结构15焊缝进行检测,对检测出的钢结构15数据进行记录,最后对钢结构15进行标记合格和不合格,以此来完成对钢结构15的检测。
61.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1