基于模态选择的压缩感知涡旋成像方法、存储介质及应用
1.本发明属于雷达成像技术领域,尤其涉及一种基于模态选择的压缩感知涡 旋成像方法、存储介质及应用。
背景技术:
2.目前,雷达成像技术相比于光成像技术,具有克服大气扰动、云雾等自然 条件影响而继续成像的能力,是一种在全时段、全气候条件下都能发挥作用的 信息获取手段。相比于传统平面波雷达仅在距离上存在差异而在凝视观测几何 条件下无法提供方位分辨能力,涡旋电磁雷达由于发射因携带轨道角动量 (orbital angularmomentum,oam)而具有螺旋相位波前的涡旋电磁波,因此在距 离向和方位向同时具有相位差异性,利用这种相位差异性,通过对涡旋电磁波 回波处理可实现目标的距离向以及方位向二维成像,再与合成孔径(syntheticaperture radar,sar)/逆合成孔径(inverse synthetic aperture radar,isar)技术相 结合可提供一种新的成像方式。
3.基于快速傅里叶变化(fast fourier transform,fft)等传统成像算法的涡旋电 磁成像的方位向分辨率与使用的轨道角动量模态l范围有关,采用的模态数越 多,方位向分辨率越高,否则将会使目标方位像轮廓产生较高的旁瓣甚至混叠, 为了降低方位角成像时对oam模态范围的要求,对稀疏贝叶斯学习(sparsebayesian learning,sbl)“liu k,li x,gao y,et al.high-resolution electromagneticvortex imaging based on sparse bayesian learning[j].ieee sensors journal,2017,17 (21):6918-6927.”、正交匹配追踪(orthogonal matching pursuit,omp)“guo s,hez,chen r.high resolution 2-d electromagnetic vortex imaging using uniformcircular arrays[j].ieee access,2019,7:132430-132437.”等稀疏恢复方法进行了 研究。然而,目前关于压缩感知(compressed sensing,cs)涡旋成像的研究中并没 有考虑涡旋波场强以及模态选择对成像效果的影响,由于不同模态的主瓣方向 不同,对于远距离目标而言无法被所有模态主瓣照射,这将会对信息获取以及 成像造成影响,文献“yuan t,cheng y,wang h,et al.beam steering forelectromagnetic vortex imaging using uniform circular arrays[j].ieee antennas andwireless propagation letters,2016,16:704-707.”与“yuan t,wang h,qin y,et al. electromagnetic vortex imaging using uniform concentric circular arrays[j].ieeeantennas and wireless propagation letters,2015,15:1024-1027.”提出涡旋波束主 瓣转向技术使目标可被不同模态涡旋波照射,但由于主瓣转向后存在残差,且 不同模态的残差不同,这将导致涡旋电磁波cs成像中不同模态序列获得的成像 结果存在差异。因此,在考虑涡旋场强的影响时,如何选择模态序列以保证压 缩成像效果需要进一步研究。
[0004]
通过上述分析,现有技术存在的问题及缺陷为:由于不同模态涡旋波进行 波束控制转向后存在场强差异,而目前的涡旋成像压缩感知算法并没有考虑波 束转向后使用不同模态序列对成像质量的影响。
[0005]
解决以上问题及缺陷的难度为:将压缩感知与遗传算法结合,并建立适合 模态序列变化与选择的遗传算法模型。
[0006]
解决以上问题及缺陷的意义为:在考虑了不同模态涡旋波波束指向的基础 上,提供了一种能够选择较优模态序列的方法,从而减少了成像所需的模态数 量且提升了成像质量。
技术实现要素:
[0007]
针对现有技术存在的问题,本发明提供了一种基于模态选择的压缩感知涡 旋成像方法、存储介质及应用。
[0008]
本发明是这样实现的,一种基于模态选择的压缩感知涡旋成像方法,所述 基于模态选择的压缩感知涡旋成像方法,包括:
[0009]
步骤一,建立成像模型,令雷达位于坐标系o-xyz的原点o(0,0,0),x轴 代表方位向,y轴代表距离向;用于产生涡旋电磁波的均匀圆环阵列由n个阵元 构成且中心位于原点o;(该步骤建立的成像模型为整个方案中理论推导的基础)
[0010]
步骤二,目标由多个散射点组成,在距离雷达高度为h的平面沿着x轴正 向以速度v运动;线性调频信号被用于承载轨道角动量,对均匀圆环整列的相 位激励方式进行调整以使不同模态的涡旋波具有相同的波束指向,从而目标可 以被所有涡旋波束照射;(该步骤中对不同模态的涡旋波进行了波束控制,是接 下来对回波进行压缩感知与遗传算法优化的前提)
[0011]
步骤三,基于傅里叶变换获得的二维成像结果和压缩感知算法获得的二维 成像结果(随机选择模态序列)进行相关运算,并通过遗传算法优化模态序列, 得到优化后的二维成像结果;(该步骤是本方案的核心部分,通过压缩感知降低 成像模态数量要求,并使用遗传算法优化成像质量)
[0012]
步骤四,根据优化后的二维成像结果,通过对目标方位角的变化曲线拟合 可得到一阶项系数,从而获得对应该目标的y轴信息,最终实现目标的三维成 像(该步骤是对方案最后一个部分的完善,通过对方位角曲线分析以获得目标最 后的一维信息,实现目标三维信息重构)。
[0013]
进一步,所述步骤二中,目标由多个散射点组成,在距离雷达高度为h的 平面沿着x轴正向以速度v运动具体过程为:
[0014]
假设目标的等效相位中心为o',则目标位于的相对坐标系为o'-x'y'z'且指向 与雷达坐标系o-xyz一致,理想散射点在相对坐标系中表示为 a'
t
(x'
t
,y'
t
,z'
t
)t∈1,2,...,m,在坐标系o-xyz中可表示为a
t
(x
t
,y
t
,z
t
),且为雷达与散射点之间连线的距离,两者满足关系为:
[0015][0016]
线性调频信号被用于承载轨道角动量,发射信号表示为:
[0017][0018]
其中t
p
和k分别代表信号的脉冲宽度以及lfm的调频率,tm与分别代表 慢时间域以及快时间域,fc为信号的中心频率,l为oam模态值并且 φn=2πn/n,n=0,1,2
…
,n-1代表第n个阵元的相位,ψn=lφn为每个阵元所对应的相位 激励;对不同模态值下的涡旋电磁波主瓣进行转向,每个阵元的激励相位需要 变为:
[0019]
ψn=lφn+ka sinθ0cosφn;
[0020]
其中为波数,a为阵列的半径,θ0为相较于涡旋波原主瓣方向的偏转 角度。
[0021]
进一步,由于涡旋波主瓣指向与模态的关系满足下式:
[0022][0023]
因此θ0=θ
t-θ
max
,其中θ
t
是需要转至的方向;根据上述分析,相应的强度函 数可表示为:
[0024][0025]
其中ζ=ka sinθ,ζ0=ka sinθ0,并且当偏转角度θ0=0时,上式可表示为贝塞尔 函数j
l
(ka sinθ);当偏转角度较小时,涡旋电磁波的相位仍符合螺旋分布,目标 方位角与oam模态的对偶关系可视为不变。
[0026]
进一步,所述步骤三中,距离压缩具体过程为:
[0027]
假设目标由m个散射点组成,且阵列为mimo模式,则在一个脉冲内的接 收回波可表示为:
[0028][0029]
其中τ
t
=2r
t
/c为每个散射点所对应的回波延迟,为散射点在慢时间tm下 的方位角;假设雷达至目标等效相位中心o'的距离为r
ref
,则解调频处理后的中 频回波信号为:
[0030][0031]
其中是以相位中心o'为参考的时间,τ
δt
=τ
t-τ
ref
为一个脉冲内的相 对回波时延且τ
ref
=2r
ref
/c;对上式中的残留视频相位项以及斜置项补偿后进行快 时间域傅里叶变化可得到一维距离像:
[0032][0033]
进一步,所述雷达回波信号在方位角域的稀疏表示模型,对回波信号进行 简化如
下:
[0034][0035]
其中lk(k=1,2,...,k)为相应的模态数,α
t
=sinc[t
p
(f+kτ
δt
)]
·
exp(-j2πfcτ
δt
);假设将 目标所在的区域划分为n个离散网格,则n>>m且将是所有目标 可能所在方位角的抽样网格,将上式用向量形式表示如下:
[0036]
s=pα;
[0037]
其中向量s为不同模态值下接收到的回波,其与向量p和向量α分别表示如 下:
[0038][0039][0040][0041]
根据压缩感知理论,重建向量α是一个凸优化问题,通过求解下述凸问题 进行求解:
[0042][0043]
其中||
·
||2代表范数,φ代表测量矩阵。
[0044]
进一步,所述步骤三中,通过遗传算法优化模态序列,得到优化后的二维 成像结果具体过程为:
[0045]
对遗传算法的各个参量进行设计,选出相对最优的模态序列;假设总模态 序列l
ord
的最大与最小模态分别为lm和-lm,模态步进值为1,总模态数为 k=2lm+1;测量矩阵φ在遗传算法中被视作种群个体以完成选择、交叉、变异的 过程,φ的维度与总模态数和所需模态序列长度有关,假设模态序列长度为m, 则φ的维度为m
×
k;为使模态序列中的模态唯一不重复,测量矩阵φ必须满足秩 为m的条件,即:
[0046]
r(φ)=m;
[0047]
此时测量矩阵φ与字典矩阵p相乘可得到:
[0048]am
×n=φ
·
p;
[0049]
其中矩阵a即为从总模态回波序列中选出的用于成像的回波序列;
[0050]
遗传算法需要构造合适的适应度函数,假设目标在某一个慢时间的距离-方 位角二维像q
tra
通过传统方法如傅里叶变化获取,而q
cs
代表由模态序列l根据所 提压缩感知算法在该慢时间获得的二维像,其中l代表由遗传算法选取的模态序 列组合,满足:
[0051]
l=φ
·
l
ord
;
[0052]
因此相应的适应度函数f
fit
可以定义为:
[0053]ffit
=cor(q
tra
,q
cs
);
[0054]
其中cor(
·
)代表求相关性,即当模态序列相对最优时q
tra
与q
cs
的相关性最大, 此时的最优序列l
op
可表示为:
[0055]
l
op
=arg max(cor(q
tra
,q
cs
))s.t.len(l
op
)=m。
[0056]
进一步,所述根据序列l
op
,获得目标在距离向以及方位向的二维图像;为 得到目标的三维图像,获取目标在y轴上的信息,由于目标的方位角满足:
[0057][0058]
该式子代表目标的方位角随慢时间tm变化的趋势,x0为慢时间起始时刻目 标的横坐标;由于目标的起始方位角得到,且由上式可知满足下列关系:
[0059][0060]
y为目标的y轴信息,则可得下述关系式:
[0061][0062]
所以可知起始时刻横坐标与目标纵坐标满足关系
[0063][0064]
由于第一个式子可近似表示为:
[0065][0066]
因此对其化简可得到其一阶项系数满足:
[0067][0068]
通过对目标方位角的变化曲线拟合可得到一阶项系数c1,从而获得对应该目 标的y轴信息,最终实现目标的三维成像。
[0069]
本发明另一目的在于提供一种接收用户输入程序存储介质,所存储的计算 机程序使电子设备执行所述基于模态选择的压缩感知涡旋成像方法,包括:
[0070]
步骤一,建立成像模型,令雷达位于坐标系o-xyz的原点o(0,0,0),x轴 代表方位向,y轴代表距离向;用于产生涡旋电磁波的均匀圆环阵列由n个阵元 构成且中心位于原点o;
[0071]
步骤二,目标由多个散射点组成,在距离雷达高度为h的平面沿着x轴正 向以速度v运动;线性调频信号被用于承载轨道角动量,对均匀圆环整列的相 位激励方式进行调整以使不同模态的涡旋波具有相同的波束指向,从而目标可 以被所有涡旋波束照射;
[0072]
步骤三,基于傅里叶变换获得的二维成像结果和压缩感知算法获得的二维 成像结果(随机选择模态序列)进行相关运算,并通过遗传算法优化模态序列, 得到优化后的二维成像结果;
[0073]
步骤四,根据优化后的二维成像结果,通过对目标方位角的变化曲线拟合 可得到一阶项系数,从而获得对应该目标的y轴信息,最终实现目标的三维成 像。
[0074]
本发明另一目的在于提供一种所述基于模态选择的压缩感知涡旋成像方法 在雷
达成像中的应用。
[0075]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明在 传统压缩感知成像算法中考虑了波束控制技术造成的涡旋波场强影响,并根据 不同成像模态序列造成成像质量不同,构建适合模态选择的遗传算法以优化成 像模态序列,能够实现在降低成像所需的模态数量的同时,有效提升了成像的 质量。
附图说明
[0076]
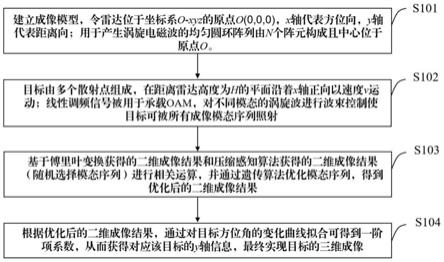
图1是本发明实施例提供的基于模态选择的压缩感知涡旋成像方法流程图。
[0077]
图2是本发明实施例提供的基于模态选择的压缩感知涡旋成像方法过程示 意图。
[0078]
图3是本发明实施例提供的成像模型示意图。
[0079]
图4是本发明实施例提供的成像效果对比示意图。
[0080]
图中:图a、随机模态序列成像;图b、优化模态序列成像。
[0081]
图5是本发明实施例提供的三维成像结果示意图。图6是本发明实施例提供的目标三维成像示意图。
具体实施方式
[0082]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例, 对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以 解释本发明,并不用于限定本发明。
[0083]
针对现有技术存在的问题,本发明提供了一种基于模态选择的压缩感知涡 旋成像方法、存储介质及应用,下面结合附图对本发明作详细的描述。
[0084]
本发明提供的基于模态选择的压缩感知涡旋成像方法业内的普通技术人员 还可以采用其他的步骤实施,图1的本发明提供的基于模态选择的压缩感知涡 旋成像方法仅仅是一个具体实施例而已。
[0085]
如图1所示,本发明实施例提供的基于模态选择的压缩感知涡旋成像方法, 包括:
[0086]
s101:建立成像模型,令雷达位于坐标系o-xyz的原点o(0,0,0),x轴代 表方位向,y轴代表距离向;用于产生涡旋电磁波的均匀圆环阵列由n个阵元构 成且中心位于原点o。
[0087]
s102:目标由多个散射点组成,在距离雷达高度为h的平面沿着x轴正向 以速度v运动;线性调频信号被用于承载轨道角动量,对均匀圆环整列的相位 激励方式进行调整以使不同模态的涡旋波具有相同的波束指向,从而目标可以 被所有涡旋波束照射。
[0088]
s103:基于傅里叶变换获得的二维成像结果和压缩感知算法获得的二维成 像结果(随机选择模态序列)进行相关运算,并通过遗传算法优化模态序列, 得到优化后的二维成像结果。
[0089]
s104:根据优化后的二维成像结果,通过对目标方位角的变化曲线拟合可 得到一阶项系数,从而获得对应该目标的y轴信息,最终实现目标的三维成像。
[0090]
本发明实施例提供的s102中,目标由多个散射点组成,在距离雷达高度为 h的平面沿着x轴正向以速度v运动具体过程为:
[0091]
假设目标的等效相位中心为o',则目标位于的相对坐标系为o'-x'y'z'且指向 与雷达坐标系o-xyz一致,理想散射点在相对坐标系中可以表示为 a'
t
(x'
t
,y'
t
,z'
t
)t∈1,
2,...,m,在坐标系o-xyz中可表示为a
t
(x
t
,y
t
,z
t
),且为雷达与散射点之间连线的距离,两者满足关系:
[0092][0093]
本发明实施例提供的s102中,线性调频信号被用于承载轨道角动量,发射 信号表示为:
[0094][0095]
其中t
p
和k分别代表信号的脉冲宽度以及lfm的调频率,tm与分别代表 慢时间域以及快时间域,fc为信号的中心频率,l为oam模态值并且 φn=2πn/n,n=0,1,2
…
,n-1代表第n个阵元的相位,ψn=lφn为每个阵元所对应的相位 激励;对不同模态值下的涡旋电磁波主瓣进行转向,每个阵元的激励相位需要 变为:
[0096]
ψn=lφn+ka sinθ0cosφn;
[0097]
其中为波数,a为阵列的半径,θ0为相较于涡旋波原主瓣方向的偏转 角度。
[0098]
由于涡旋波主瓣指向与模态的关系满足下式:
[0099][0100]
因此θ0=θ
t-θ
max
,其中θ
t
是需要转至的方向;根据上述分析,相应的强度函 数可表示为:
[0101][0102]
其中ζ=ka sinθ,ζ0=ka sinθ0,并且当偏转角度θ0=0时,上式可表示为贝塞尔 函数j
l
(ka sinθ);当偏转角度较小时,涡旋电磁波的相位仍符合螺旋分布,目标 方位角与oam模态的对偶关系可视为不变。
[0103]
本发明实施例提供的距离压缩具体过程为:
[0104]
假设目标由m个散射点组成,且阵列为mimo(多输入多输出)模式,则在 一个脉冲内的接收回波可表示为:
[0105][0106]
其中τ
t
=2r
t
/c为每个散射点所对应的回波延迟,为散射点在慢时间tm下 的方位角;假设雷达至目标等效相位中心o'的距离为r
ref
,则解调频处理后的中 频回波信号为:
[0107][0108]
其中是以相位中心o'为参考的时间,τ
δt
=τ
t-τ
ref
为一个脉冲内的相 对回波时延且τ
ref
=2r
ref
/c;对上式中的残留视频相位项(rvp)以及斜置项补偿后 进行快时间域傅里叶变化可得到一维距离像:
[0109][0110]
所述雷达回波信号在方位角域的稀疏表示模型,对回波信号进行简化如下:
[0111][0112]
其中lk(k=1,2,...,k)为相应的模态数,α
t
=sin c[t
p
(f+kτ
δt
)]
·
exp(-j2πfcτ
δt
);假设将 目标所在的区域划分为n个离散网格,则n>>m且将是所有目标 可能所在方位角的抽样网格,将上式用向量形式表示如下:
[0113]
s=pα;
[0114]
其中向量s为不同模态值下接收到的回波,其与向量p和向量α分别表示如 下:
[0115][0116][0117][0118]
根据压缩感知理论,重建向量α是一个凸优化问题,通过求解下述凸问题 进行求解:
[0119][0120]
其中||
·
||2代表范数,φ代表测量矩阵。
[0121]
本发明实施例提供的s103中,通过遗传算法优化模态序列,得到优化后的 二维成像结果具体过程为:
[0122]
对遗传算法的各个参量进行设计,选出相对最优的模态序列;假设总模态 序列l
ord
的最大与最小模态分别为lm和-lm,模态步进值为1,因此总模态数为 k=2lm+1;测量矩阵φ在遗传算法中被视作种群个体以完成选择、交叉、变异的 过程,φ的维度与总模态数和所需模态序列长度有关,假设模态序列长度为m, 则φ的维度为m
×
k;使模态序列中的模态唯一不重复,测量矩阵φ必须满足秩为 m的条件,即:
[0123]
r(φ)=m;
[0124]
此时测量矩阵φ与字典矩阵p相乘可得到:
[0125]am
×n=φ
·
p;
[0126]
其中矩阵a即为从总模态回波序列中选出的用于成像的回波序列;
[0127]
遗传算法需要构造合适的适应度函数,假设目标在某一个慢时间的距离-方 位角二维像q
tra
通过传统方法获取,而q
cs
代表由模态序列l根据所提压缩感知算 法在该慢时间获得的二维像,其中l代表由遗传算法选取的模态序列组合,满足:
[0128]
l=φ
·
l
ord
;
[0129]
因此相应的适应度函数f
fit
可以定义为:
[0130]ffit
=cor(q
tra
,q
cs
);
[0131]
其中cor(
·
)代表求相关性,即当模态序列相对最优时q
tra
与q
cs
的相关性最大, 此时的最优序列l
op
可表示为:
[0132]
l
op
=arg max(cor(q
tra
,q
cs
))s.t.len(l
op
)=m。
[0133]
本发明实施例中,根据序列l
op
,获得目标在距离向以及方位向的二维图像; 为得到目标的三维图像,获取目标在y轴上的信息,由于目标的方位角满足:
[0134][0135]
该式子代表目标的方位角随慢时间tm变化的趋势,x0为慢时间起始时刻目 标的横坐标;由于目标的起始方位角得到,且由上式可知满足下列关系:
[0136][0137]
y为目标的y轴信息,则可得下述关系式:
[0138][0139]
所以可知起始时刻横坐标与目标纵坐标满足关系
[0140][0141]
由于第一个式子可近似表示为:
[0142][0143]
因此对其化简可得到其一阶项系数满足:
[0144][0145]
通过对目标方位角的变化曲线拟合可得到一阶项系数c1,从而获得对应该目 标的y轴信息,最终实现目标的三维成像。
[0146]
下面结合具体实施例对本发明的技术方案作进一步的描述。
[0147]
1、雷达位于坐标系o-xyz的原点o(0,0,0),x轴代表方位向,y轴代表距 离向,tm与分别代表慢时间域以及快时间域。用于产生涡旋电磁波的均匀圆环 阵列(uca)由n个阵元构成且中心位于原点o,z轴与阵列平面垂直。
[0148]
2、目标由多个散射点组成,在距离雷达高度为h的平面沿着x轴正向以速 度v运
动。假设目标的等效相位中心为o',则目标位于的相对坐标系为o'-x'y'z' 且指向与雷达坐标系o-xyz一致,理想散射点在相对坐标系中可以表示为 a'
t
(x'
t
,y'
t
,z'
t
)t∈1,2,...,m,在坐标系o-xyz中可表示为a
t
(x
t
,y
t
,z
t
),且为雷达与散射点之间连线的距离,两者满足关系:
[0149][0150]
图3为相应的目标成像模型。
[0151]
3、线性调频信号(lfm)被用于承载轨道角动量,且发射信号可以表示为:
[0152][0153]
其中t
p
和k分别代表信号的脉冲宽度以及lfm的调频率。fc为信号的中心 频率,l为oam模态值并且φn=2πn/n,n=0,1,2
…
,n-1代表第n个阵元的相位,ψn=lφn为每个阵元所对应的相位激励。为了对不同模态值下的涡旋电磁波主瓣进行转 向,每个阵元的激励相位需要变为:
[0154]
ψn=lφn+ka sinθ0cosφn;
[0155]
其中为波数,a为阵列的半径,而θ0为相较于涡旋波原主瓣方向的偏 转角度。
[0156]
4、由于涡旋波主瓣指向与模态的关系满足下式:
[0157][0158]
因此θ0=θ
t-θ
max
,其中θ
t
是需要转至的方向。根据上述分析,相应的强度函 数可表示为:
[0159][0160]
其中ζ=ka sinθ,ζ0=ka sinθ0,并且当偏转角度θ0=0时,上式可表示为贝塞尔 函数j
l
(ka sinθ)。并且当偏转角度较小时,涡旋电磁波的相位仍符合螺旋分布, 目标方位角与oam模态的对偶关系可视为不变。
[0161]
5、假设目标由m个散射点组成,且阵列为mimo(多输入多输出)模式, 则在一个脉冲内的接收回波可表示为:
[0162][0163]
其中τ
t
=2r
t
/c为每个散射点所对应的回波延迟,为散射点在慢时间tm下 的方位角。假设雷达至目标等效相位中心o'的距离为r
ref
,则解调频处理后的中 频回波信号为:
[0164][0165]
其中是以相位中心o'为参考的时间,τ
δt
=τ
t-τ
ref
为一个脉冲内的相 对回波时延且τ
ref
=2r
ref
/c。对上式中的残留视频相位项(rvp)以及斜置项补偿后 进行快时间域傅里叶变化可得到一维距离像:
[0166][0167]
6、为了建立雷达回波信号在方位角域的稀疏表示模型,对回波信号进行简 化如下:
[0168][0169]
其中lk(k=1,2,...,k)为相应的模态数,而α
t
=sin c[t
p
(f+kτ
δt
)]
·
exp(-j2πfcτ
δt
)。假设 将目标所在的区域划分为n个离散网格,则n>>m且将是所有目 标可能所在方位角的抽样网格,将上式用向量形式表示如下:
[0170]
s=pα;
[0171]
其中向量s为不同模态值下接收到的回波,其与向量p和向量α分别表示如 下:
[0172][0173][0174][0175]
根据压缩感知理论,重建向量α是一个凸优化问题,可以通过求解下述凸 问题进行求解:
[0176][0177]
其中||
·
||2代表范数,φ代表测量矩阵。
[0178]
7、由于字典矩阵p中考虑了经过主瓣转向后不同模态涡旋波强度的影响, 因此用于成像而选择的模态序列的参数,如最大模态值、模态序列长度、模态 序列取值等变化时都可能会对成像效果造成影响,因此遗传算法被使用以选择 合适的模态序列以获得更好的成像效果。
[0179]
8、为了更好的适应遗传算法规则,选出相对最优的模态序列,需要对压缩 感知的各个参量进行设计。假设总模态序列l
ord
的最大与最小模态分别为lm和
ꢀ‑
lm,模态步进值为1,因此总模态数为k=2lm+1。测量矩阵φ在遗传算法中被视 作种群个体以完成选择、交叉、变异的过程,φ的维度与总模态数和所需模态 序列长度有关,假设模态序列长度为m,则φ的维度为m
×
k。为了使模态序列中 的模态唯一不重复,测量矩阵φ必须满足秩为m的条件,即:
[0180]
r(φ)=m;
[0181]
此时测量矩阵φ与字典矩阵p相乘可得到:
[0182]am
×n=φ
·
p;
[0183]
其中矩阵a即为从总模态回波序列中选出的用于成像的回波序列。
[0184]
随后需要构造合适的适应度函数,假设目标在某一个慢时间的距离-方位角 二维像q
tra
通过传统方法获取,而q
cs
代表由模态序列l根据所提压缩感知算法在 该慢时间获得的二维像,其中l代表由遗传算法选取的模态序列组合,满足:
[0185]
l=φ
·
l
ord
;
[0186]
因此相应的适应度函数f
fit
可以定义为:
[0187]ffit
=cor(q
tra
,q
cs
);
[0188]
其中cor(
·
)代表求相关性,即当模态序列相对最优时q
tra
与q
cs
的相关性最大, 此时的最优序列l
op
可表示为:
[0189]
l
op
=arg max(cor(q
tra
,q
cs
))s.t.len(l
op
)=m;
[0190]
9、根据序列l
op
,可以获得目标在距离向以及方位向的二维图像。而为了得 到目标的三维图像,需要获取目标在y轴上的信息,由于目标的方位角满足:
[0191][0192]
该式子代表目标的方位角随慢时间tm变化的趋势,x0为慢时间起始时刻目 标的横坐标。由于目标的起始方位角可以得到,且由上式可知满足下列关系:
[0193][0194]
y为目标的y轴信息,则可得下述关系式:
[0195][0196]
所以可知起始时刻横坐标与目标纵坐标满足关系
[0197][0198]
由于第一个式子可近似表示为:
[0199][0200]
因此对其化简可得到其一阶项系数满足:
[0201][0202]
通过对目标方位角的变化曲线拟合可得到一阶项系数c1,从而获得对应该目 标的y轴信息,最终实现目标的三维成像。
[0203]
下面结合仿真实验对本发明的技术效果作详细的描述。
[0204]
图4的(a)为使用随机选择的成像模态序列进行成像处理得到的目标二维图 像,为有效提升成像质量,利用本方案所述的方法对成像模态序列进行遗传算 法优化,并根据优化得到的模态序列对目标进行成像,如图4的(b)所示,可以 看出成像质量得到了显著的提升,误差峰值以及旁瓣被有效抑制;图5的(a)为 对某一个散射中心的方位角变化曲线拟合的图像,根据图中得到的一阶项系数 值可以计算得到目标的y轴信息,图5的(b)为目标在x轴和z轴的成像信息, 因此得到如图6所示的目标三维成像。
[0205]
应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合 来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中, 由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普 通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在 处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸 如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载 体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路 或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、 可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的 处理器执行的软件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
[0206]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于 此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明 的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的 保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1