一种基于蛇形机器人的充填未接顶空区探测装置及方法
1.本发明涉及矿山测量及安全技术领域,具体为一种基于蛇形机器人的充填未接顶空区探测装置及方法。
背景技术:
2.采矿充填技术是当前地下采矿工程中广泛应用的施工技术,相较于其他施工技术,充填采矿技术具有回采率高、安全性好、对环境影响小等特点,是当前采矿发展的主流方向。但由于充填过程中料浆固结沉降、料浆自流坡度、料浆浓度过低和滤水速度慢、空区顶板形状不规整、充填井布置和充填顺序不合理等原因,采空区充填接顶难度极大,往往会存在充填不接顶的现象客观。空区充填不接顶往往会导致一些列严重后果:采用上向进路法回采时,若一步骤进路充填不接顶,则二步骤回采过程中安全条件差;采用下向进路充填法回采时,若进路充填不接顶,则无法形成有效的人工假顶,严重威胁下分层回采作业安全;空场嗣后充填法回采,若采场充填不接顶,则不能有效控制上部岩体的变形和移动,有可能造成大规模岩层沉降,特别是上行式开采时,若充填不接顶,则须留设大量顶底柱,该部分矿柱资源回收难度大、回收率低,造成严重的资源浪费。因此需对充填未接顶空区进行有效处理,而充填未接顶空区的探测则是制定合理有效处理措施的前提和基础条件。
3.传统的空区探测方法通过打竖向钻孔,以单线悬吊激光扫描装置下放至空区,利用激光截面横扫确定空区的水平断面形态,然后逐步重建、积分以确定空区的三维模型和体积。明显的,传统的空区探测方法存在着许多不足:探测工作的工作量和成效严重依赖钻孔位置,而探测初期一切都未知,探测的工作量和成效就成了随机性事件。东北大学和北京科技大学在传统方法的基础上提出了以无人飞行器搭载激光扫描装置对采空区进行快速探测的方法,该方法工作量小、速度快、准确性高,可大大提高采空区扫描的速度和精度。但充填未接顶空区的形态有其特殊性,主要以夹缝和裂隙为主,体积小且存在遮挡,且上部积水的可能性较大,无人机只适合在空间体积大的区域内活动而无法进入到充填空区。目前,国内外还未见有一种针对充填未接顶空区探测的方法和装置。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种基于蛇形机器人的充填未接顶空区探测装置及方法,可有效解决充填未接顶空区探测难题,减少探测工作量、提高探测精度。
5.本发明的技术方案为:一种基于蛇形机器人的充填未结顶空区探测装置,其特征在于:
6.(1)所述基于蛇形机器人的充填未结顶空区探测装置包括n个蛇形机器人和1台移动工作台,n个蛇形机器人分为1个领头蛇形机器人和(n-1)个中继蛇形机器人。
7.(2)所述蛇形机器人采用模块化设计,按照位置和功能的不同分为蛇头模块、蛇尾模块、履带行走模块、蜿蜒-蠕动模块四种,各模块间采用关节结构连接,其中:蛇头模块位于蛇形机器人前端,蛇尾模块位于蛇形机器人末端,履带行走模块对应履带运动步态,蜿
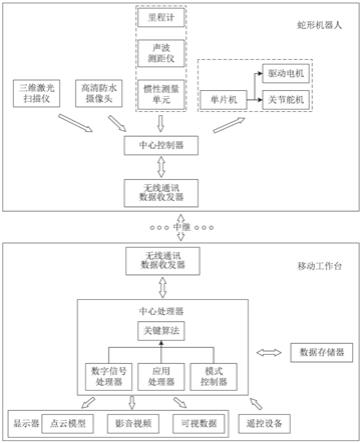
蜒-蠕动模块对应蜿蜒运动和伸缩运动2基本步态,详细说明表如表1所示。运动过程中,根据路面环境信息通过移动工作台的遥控器选择不同的基本步态和运动模式。所有模块均包含动作系统和感知系统,其中:动作系统由单片机、驱动电机、关节舵机组成,用于支持模块运动;感知系统由里程计、声波测距仪、惯性测量单元组成,用作获取蛇形机器人的环境信息和位置参数。
8.表1模块功能说明
[0009][0010]
(3)移动工作台包括无线通讯数据收发器、中心处理器、数据存储器、显示器和遥控器等部件,中心处理器基于数字信号处理器、应用处理器和模式控制器3部分集成而来,用于数据的解析和处理,探测结果以点云模型、影音视频和可视数据的形式呈现在显示器。
[0011]
(4)在所述无线通讯数据收发器功率范围内,移动工作台、领头蛇形机器人与中继蛇形机器人三者之间均可实现无线连接和数据传输,并可在移动工作台的遥控器上进行连接信号切换。
[0012]
进一步地,所述蛇头模块上搭载包括高清防水摄像头、三维激光扫描仪、动作系统和里程计、声波测距仪、惯性测量单元组成的感知系统,高清防水摄像头位于蛇头模块最前端,其后依次为三维激光扫描仪和感知系统,动作系统位于蛇头模块最末端。
[0013]
进一步地,所述履带行走模块和蜿蜒-蠕动模块采用对称设计,前后可以对调,前部和后部均有动作系统,而履带行走模块中部除感知系统外还加装履带行走机构。
[0014]
进一步地,所述蛇尾模块包含中心控制器、无线通讯数据收发器、动作系统和感知系统,动作系统位于最前端,中部为中心控制器和感知系统,末端为无线通讯信号发射器。
[0015]
进一步地,所述蛇头模块、履带行走模块、蜿蜒-蠕动模块和蛇尾模块均在表面设有安全壳,关节机构外加保护套,安全壳和保护套均为不透气轻质防水材料制成,同时两者之间留设有一定间距并注满压缩空气,保证蛇形机器人进入水体后能够漂浮在水面上,所有模块的安全壳表面涂抹高摩擦系数材料以增大蛇形机器人在充填体表面的抓地力;
[0016]
进一步地,所述动作系统、三维激光扫描仪、声波测距仪、无线通讯数据收发器均做防水处理。
[0017]
进一步地,所述中心控制器的控制指令采用模式化设计,共分为前进、后退、左转、右转、抬头、复位、跨障、越沟和爬坡9种运动模式,分别对应着履带行走、蜿蜒和伸缩3种基本步态,不同步态的不同模式,对应着驱动电机、关节舵机不同的应答动作,由所述遥控器进行手动操作,由所述中心控制器进行数据解析。
[0018]
优选地,所述领头蛇形机器人与中继蛇形机器人机身长度1.5-2m,最大截面直径5cm,可自由穿过直径大于等于6cm的通道。
[0019]
进一步地,本发明还提供一种基于蛇形机器人的充填未接顶空区探测装置进行未接顶空区探测的方法,所述方法依次包括以下探测步骤:
[0020]
步骤1、从待探测充填未接顶空区附近井巷工程中施工孔径6-10cm的钻孔与未接顶空区贯通,形成所述蛇形机器人的进出通道,所述钻孔长度要求≤10m、坡度要求小于等于25%,若未接顶空区与附近井巷工程之间有长度≤10m、坡度≤25%的通道相连通,则可利用现有通道作为蛇形机器人的进出通道,跳过步骤1直接进入步骤2;
[0021]
步骤2、将移动工作台移至附近井巷工程的安全区域,开启移动工作台和领头蛇形机器人,并把领头蛇形机器人放入步骤1中的进出通道,并通过所述遥控器操作所述领头蛇形机器人进入待探测的未接顶空区,此时待探测的未接顶空区内的景象将被所述高清防水摄像头记录,再通过无线通讯数据收发器传输至移动工作台的显示器上;
[0022]
步骤3、操作技术人员通过观看所述显示器操控遥控器远程控制领头蛇形机器人向待探测的未接顶空区纵深方向前进,并根据传输回来的数据和画面决定领头蛇形机器人的基本步态和运动模式,当路况平整紧实没有积水时,则选择履带行走基本步态,当运动至积水或疏松的沙质地带时,则选择蜿蜒基本步态,当上述2种步态均无法运动时,选择伸缩基本步态返回;运动模式则根据实际地形及探测需求来进行选择,当需要前进/后退/左转/右转/抬头/复位/跨障/越沟/爬坡时,则分别设定为前进/后退/左转/右转/抬头/复位/跨障/越沟/爬坡运动模式;
[0023]
步骤4、当所述显示器界面上的信号消失时,领头蛇形机器人停止运动,打开第1个中继蛇形机器人并将其放入放入步骤1中的进出通道,将所述移动工作台的无线通讯数据收发器与第1个中继蛇形机器人的无线通讯数据收发器建立连接,然后操作第1个中继蛇形机器人运动至领头蛇形机器人处,然后将信号切换至领头蛇形机器人继续向待测未接顶空区纵深运动,当显示器界面上信号再次消失时,打开第2个中继蛇形机器人并将其放入放入步骤1中的进出通道,将所述移动工作台的无线通讯数据收发器与第2个中继蛇形机器人的无线通讯数据收发器建立连接,然后操作第2个中继蛇形机器人运动至领头蛇形机器人处,然后将信号切换至领头蛇形机器人继续向待测未接顶空区纵深运动
…
以此类推直至领头蛇形机器人遍历所有空区角落,此时共计放入m个中继蛇形机器人,m≤(n-1),在领头蛇形机器人运动过程中,待探测充填未接顶空区的三维形态通过三维激光扫描仪进行扫描并将测量数据传输至移动工作台的数据存储器,积水区积水深度通过声波测距仪测得并将测量数据传输至移动工作台的数据存储器,上述测量数据通过中心处理器处理后以点云模型、影音视频和可视数据的形式呈现在显示器上;
[0024]
步骤5、依次操作领头蛇形机器人、第m个中继蛇形机器人、第(m-1)个中继蛇形机器人、第(m-2)个中继蛇形机器人
…
第1个中继蛇形机器人退出步骤1中的进出通道,完成此次探测。
[0025]
本发明所述技术方案的有益效果如下:
[0026]
(1)基于蛇形机器人的充填未接顶空区探测装置,蛇形机器人具有运动稳定性好、适应地形能力强的特点,可自如应对井下空区恶劣的地形环境。
[0027]
(2)蛇形机器人采用模块化设计,具有在各种复杂环境下运动的潜力,其可靠性和
维护性高。
[0028]
(3)所有结构全部密封,防水、防尘,适于井下作业。
[0029]
(4)该蛇形机器人采用多步态设计,钻孔中履带式行走速度快,死角处蠕动行走可退回,运动高效、灵活性高,极大提高探测速度。
[0030]
(5)采用无线中继组合的形式进行运动控制,具有操作简便、不受遮挡和距离限制的特点。
附图说明
[0031]
图1为本发明提供的基于蛇形机器人的充填未接顶空区探测装置的系统原理图;
[0032]
图2为本发明提供的基于蛇形机器人的充填未接顶空区探测装置的一种实施例的外观俯视图;
[0033]
图3为本发明提供的基于蛇形机器人的充填空区体积探测装置履带行走模块局部放大图;
[0034]
图4为本发明提供的基于蛇形机器人的充填空区体积探测装置蜿蜒-蠕动模块局部放大图;
[0035]
图5为本发明提供的基于蛇形机器人的充填空区体积探测装置中心控制器的控制指令流程图;
[0036]
图中:1-高清防水摄像头;2-三维激光扫描仪;3-安全壳;4-保护套;5-无线通讯数据收发器;6-履带行走机构;7-高摩擦系数材料。
具体实施方式
[0037]
以下将结合附图对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例;基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施例,都属于本发明所保护的范围。
[0038]
如图1、图2所示,所述一种基于蛇形机器人的充填未结顶空区探测装置包括n个蛇形机器人和1台移动工作台,n个蛇形机器人分为1个领头蛇形机器人和(n-1)个中继蛇形机器人。
[0039]
所述蛇形机器人采用模块化设计,按照位置和功能的不同分为蛇头模块、蛇尾模块、履带行走模块、蜿蜒-蠕动模块四种,各模块间采用关节结构连接,其中:蛇头模块位于蛇形机器人前端,蛇尾模块位于蛇形机器人末端,履带行走模块对应履带运动步态,蜿蜒-蠕动模块对应蜿蜒运动和伸缩运动2种基本步态。运动过程中,根据路面环境信息通过移动工作台的遥控器选择不同的基本步态和运动模式。所有模块均包含动作系统和感知系统,其中:动作系统由单片机、驱动电机、关节舵机组成,用于支持模块运动;感知系统由里程计、声波测距仪、惯性测量单元组成,用作获取蛇形机器人的环境信息和位置参数。
[0040]
表1模块功能说明
[0041][0042]
所述移动工作台包括无线通讯数据收发器5、中心处理器、数据存储器、显示器和遥控器等部件,中心处理器基于数字信号处理器、应用处理器和模式控制器三部分集成而来,用于数据的解析和处理,探测结果以点云模型、影音视频和可视数据的形式呈现在显示器。
[0043]
在所述无线通讯数据收发器5功率范围内,移动工作台、领头蛇形机器人与中继蛇形机器人三者之间均可实现无线连接和数据传输,并可在移动工作台的遥控器上进行连接信号切换。
[0044]
所述蛇头模块上搭载包括高清防水摄像头1、三维激光扫描仪2、动作系统和里程计、声波测距仪、惯性测量单元组成的感知系统,高清防水摄像头1位于蛇头模块最前端,其后依次为三维激光扫描仪2和感知系统,动作系统位于蛇头模块最末端。所述高清防水摄像头1采用高画质图像传感器,像素782
×
582,并在其外嵌入12颗led灯,为技术人员提供清晰、逼真的高分辨率动态画像,以便准确判断空区的顶板岩石和充填质量状况。所述三维激光扫描仪2360
°
横扫蛇头经过截面获得充填空区局部点云数据,与里程计获得的位置数据,并结合声波测距仪测得的积水深度,通过中心处理器的关键算法实现点云数据的拼接与融合,重建空区三维空间模型,并积分得到当前已扫描空区的体积,并报告积水区域位置及水体方量。
[0045]
所述履带行走模块和蜿蜒-蠕动模块采用对称设计,前后可以对调,前部和后部均有动作系统,而履带行走模块中部除感知系统外还加装履带行走机构6。
[0046]
所述蛇尾模块包含中心控制器、无线通讯数据收发器5、动作系统和感知系统,动作系统位于最前端,中部为中心控制器和感知系统,末端为无线通讯信号发射器。
[0047]
所述蛇头模块、履带行走模块、蜿蜒-蠕动模块和蛇尾模块均表面设有安全壳3,关节机构外加保护套4,安全壳3和保护套4均为不透气轻质防水材料制成,同时两者之间留设有一定间距并注满压缩空气,保证蛇形机器人进入水体后能够漂浮在水面上,所有模块的安全壳3表面涂抹高摩擦系数材料7以增大蛇形机器人在充填体表面的抓地力;
[0048]
所述动作系统、三维激光扫描仪2、声波测距仪、无线通讯数据收发器5均做防水处理。
[0049]
所述中心控制器的控制指令采用模式化设计,共分为前进、后退、左转、右转、抬头、复位、跨障、越沟和爬坡9种运动模式,分别对应着履带行走、蜿蜒和伸缩3种基本步态,不同步态的不同模式,对应着驱动电机、关节舵机不同的应答动作,由所述遥控器进行手动
操作,由所述中心控制器进行数据解析。
[0050]
所述领头蛇形机器人与中继蛇形机器人机身长度1.5-2m,最大截面直径5cm,可自由穿过直径大于等于6cm的通道。
[0051]
采用该基于蛇形机器人的充填未接顶空区探测装置进行未接顶空区探测时依次包括以下探测步骤:
[0052]
步骤1、从待探测充填未接顶空区附近井巷工程中施工孔径6-10cm的钻孔与未接顶空区贯通,形成所述蛇形机器人的进出通道,所述钻孔长度要求≤10m、坡度要求小于等于25%,若未接顶空区与附近井巷工程之间有长度≤10m、坡度≤25%的通道相连通,则可利用现有通道作为蛇形机器人的进出通道,跳过步骤1直接进入步骤2;
[0053]
步骤2、将移动工作台移至附近井巷工程的安全区域,开启移动工作台和领头蛇形机器人,并把领头蛇形机器人放入步骤1中的进出通道,并通过所述遥控器操作所述领头蛇形机器人进入待探测的未接顶空区,此时待探测的未接顶空区内的景象将所述高清防水摄像头1记录、再通过无线通讯数据收发器5传输至移动工作台的显示器上;
[0054]
步骤3、操作技术人员通过观看所述显示器操控遥控器远程控制领头蛇形机器人向待探测的未接顶空区纵深方向前进,并根据传输回来的数据和画面决定领头蛇形机器人的基本步态和运动模式,当路况平整紧实、没有积水时,则选择履带行走基本步态,当运动至积水或疏松的沙质地带时,则选择蜿蜒基本步态,当上述2种步态均无法运动时,选择伸缩步态返回;运动模式则根据实际地形及探测需求来进行选择,当需要前进/后退/左转/右转/抬头/复位/跨障/越沟/爬坡时,则分别设定为前进/后退/左转/右转/抬头/复位/跨障/越沟/爬坡运动模式;
[0055]
步骤4、当所述显示器界面上的信号消失时,领头蛇形机器人停止运动,打开第1个中继蛇形机器人并将其放入放入步骤1中的进出通道,将所述移动工作台的无线通讯数据收发器5与第1个中继蛇形机器人的无线通讯数据收发器5建立连接,然后操作第1个中继蛇形机器人运动至领头蛇形机器人处,然后将信号切换至领头蛇形机器人继续向待测未接顶空区纵深运动,当显示器界面上信号再次消失时,打开第2个中继蛇形机器人并将其放入放入步骤1中的进出通道,将所述移动工作台的无线通讯数据收发器5与第2个中继蛇形机器人的无线通讯数据收发器5建立连接,然后操作第2个中继蛇形机器人运动至领头蛇形机器人处,然后将信号切换至领头蛇形机器人继续向待测未接顶空区纵深运动
…
以此类推直至领头蛇形机器人遍历所有空区角落,此时共计放入m个中继蛇形机器人,m≤(n-1),在领头蛇形机器人运动过程中,待探测充填未接顶空区的三维形态通过三维激光扫描仪2进行扫描并将测量数据传输至移动工作台的数据存储器,积水区积水深度通过声波测距仪测得并将测量数据传输至移动工作台的数据存储器,上述测量数据通过中心处理器处理后以点云模型、影音视频和可视数据的形式呈现在显示器上;
[0056]
步骤5、依次操作领头蛇形机器人、第m个中继蛇形机器人、第(m-1)个中继蛇形机器人、第(m-2)个中继蛇形机器人
…
第1个中继蛇形机器人退出步骤1中的进出通道,完成此次探测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1