智能空地载具、其风险地图构建及航路规划方法与装置与流程
1.本发明属于智能空地融合载具的技术领域。
背景技术:
2.随着城市经济的迅猛发展,城市交通日趋饱和,交通通行效率低下、舒适体验感差、道路资源紧张、整个城市的交通运输体系运作不协调缺乏活力等情况层出不穷,便捷舒适、经济高效的新的运输体系的需求日益迫切。
3.协调城市空域与地面资源进行智能化的空地运输的智能空地融合载具,即智能空地载具可实现传统汽车与飞机、路网资源和空域资源的有效对接,具备地面路网行驶以及低空飞行等功能,可推动城市运输体系的完善,有效缓解地面路网资源的紧张态势,促进城市低空空域的开放。
4.但其在具体的实施中仍存在大量问题,如在传统飞行中,飞行航线侧重于考虑行程时间、路径长短等是否达到最优,基本不会在其对不同区域地面人员的威胁成本等方面进行重点设计,但在城市空域中飞行时,一旦发生坠毁对地面人员会造成极大的伤害,因此有必要针对智能空地载具建立基于风险划分的稳定可靠的安全保障体系。
技术实现要素:
5.本发明的目的在于提出一种可用于建立稳定可靠的城市飞行安全保障体系的风险地图构建方法及装置,并提出基于该方法和/或装置的航路规划方法和装置,并提出一些具体应用上述方法和/或装置的智能空地载具。
6.本发明首先提供了如下的技术方案:
7.一种智能空地载具的风险地图构建方法,其包括:
8.s1获得栅格化的区域图;
9.s2在栅格化的区域图上标记禁飞区域;
10.s3确定每个栅格内所述载具的自身失效坠落概率pinv;
11.s4确定每个栅格内所述载具坠落后撞击到地面行人的概率pimp;
12.s5确定每个栅格内行人受到的撞击后的致死概率pfat;
13.s6基于s3-s5所得概率,确定每个栅格内撞击点对行人造成的总伤亡概率p;
14.s7根据总伤亡概率p的排序,确定某一栅格的相对风险等级,即其风险代价值,根据所述风险代价值得到所述风险地图;
15.其中,所述总伤亡概率通过以下模型得到:
16.p=p
inv
×
p
imp
×
p
fat
ꢀꢀꢀꢀꢀ
(7)。
17.根据本发明的一些优选实施方式,所述失效坠落概率pinv由所述载具的子系统和/或元件的失效概率相加得到。
18.根据本发明的一些优选实施方式,所述子系统包括操作系统、飞控系统、记载系统和显示系统,和/或,所述子系统和/或元件的失效概率通过专家知识得到。
19.根据本发明的一些优选实施方式,所述载具坠落后撞击到地面行人的概率p
imp
通过以下模型得到:
20.n=s
imp
*ρiꢀꢀꢀꢀꢀꢀ
(1),
[0021][0022][0023]
其中,n表示暴露在坠落区域内的行人数量,s
imp
表示撞击区域面积,s表示栅格的面积,wc表示载具的平均宽度,lc表示载具的平均长度,θ表示智能空地载具坠落时的滑翔角度,ρi表示第i个栅格区域的人口密度,表示单个行人的平均占地面积。
[0024]
根据本发明的一些优选实施方式,所述载具坠落后撞击到地面行人的概率p
imp
通过以下模型得到:
[0025][0026]
其中,ρj表示第j个栅格区域的人口密度,其它参数含义与式(1)-(3)同。
[0027]
根据本发明的一些优选实施方式,所述致死概率pfat通过以下模型得到:
[0028][0029]eimp
=mc*[v
max-operation
*(1+0.4)]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6),
[0030]
其中,f表示取值为0-1之间的代表遮蔽物遮蔽程度的遮蔽系数,e
0.5
表示当所述遮蔽系数为0.5时、死亡率达到50%所需要的撞击能量,e0表示当所述遮蔽系数为0时、造成死亡所需要的撞击能量,e
imp
表示所述载具撞击地面时的能量,v
max-operation
表示载具最大飞行速度,mc表示载具的质量。
[0031]
根据本发明的一些优选实施方式,e
0.5
=106j、e0=100j。
[0032]
基于上述构建方法,可进一步获得一种智能空地载具的风险地图构建装置,其包括存储有实现上述构建方法的程序和/或模型和/或所需数据的存储介质。
[0033]
本发明进一步提供了基于上述构建方法和/或构建装置的智能空地载具的航路规划方法,其包括:通过改进的蚁群算法自所述风险地图中获得总风险代价值最低的航路。
[0034]
根据本发明的一些优选实施方式,所述规划方法具体包括:
[0035]
s101初始化蚁群;
[0036]
s102将所得风险地图中所述风险代价值低的区域的初始信息素进行加强,得到初始信息素非均匀分配的风险地图;
[0037]
s103使用初始化的蚁群对所述初始信息素非均匀分配的风险地图进行全局寻优,得到最优航路;
[0038]
其中,所述非均匀分配通过以下模型实现:
[0039][0040]
其中r表示栅格点初始风险代价值,r表示风险代价值分配阈值,优选的,其取值为所述总伤亡概率排序或所述风险代价值的15%位数~30%位数。
[0041]
根据本发明的一些优选实施方式,所述全局寻优中应用了如下模型中的一种或多种:
[0042]
状态转移概率计算模型:
[0043][0044]
其中,表示在t时刻、蚂蚁k在栅格点i处选择栅格点j的概率,τ
ij
(t)表示信息素浓度,η
ij
表示启发式因子,其通过i节点到j节点的欧拉距离的倒数计算得到,jk表示下一时刻可以转移的所有节点集合,表示转移函数中的指引函数,α、β分别表示蚂蚁在运动中所积累的信息和启发信息在选择路径中的相对重要程度;
[0045]
信息素更新模型,包括:
[0046][0047]
λ(t)=max[ελ(t-1),λ
min
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0048]
τ
ij
(t+δt)=[1-λ(d)-λ(t)]*τ
ij
(t)+δτ
ij
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0049]
其中,λ表示动态挥发系数,λ
min
表示最小挥发系数,d
mid
、d
min
分别表示蚂蚁在某一次迭代过程中所走路径的平均值及最小值,δ表示常数,ε表示衰减因子。
[0050]
基于上述规划方法,可进一步获得一种智能空地载具的航路规划装置,其包括存储有实现上述规划方法的程序和/或模型和/或所需数据的存储介质。
[0051]
基于上述风险地图构建装置和/或航路规划装置,可进一步获得一种智能空地载具,其含有其中任一种或两种装置。
[0052]
本发明的风险地图构建及航路规划方法与装置可为智能空地载具在城市空域中运行时的安全飞行提供高效、准确的保障,并可进一步据其建立起安全可靠的城市飞行安全保障体系,有效保障地面行人的安全。本发明可进一步缓解地面交通拥堵,并维护地面安全稳定。
附图说明
[0053]
图1为标记了禁飞区域的栅格化区域图。
[0054]
图2为所述载具撞击到行人的概率p
imp
的计算模型示意图。
[0055]
图3为本发明获得的一种具体的风险地图。
[0056]
图4为一种具体的最优航路规划方法流程示意图。
[0057]
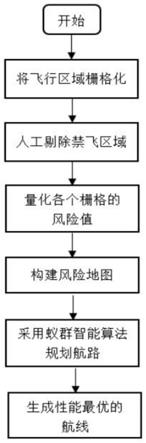
图5为一种具体获得所述风险地图及最优航路的方法的流程示意图。
[0058]
图6为一种具体的载具撞击到地面行人的概率p
imp
的计算示例图。
[0059]
图7为另一种具体的载具撞击到地面行人的概率p
imp
的计算示例图。
[0060]
图8为一个具体实施例获得的基于风险地图的航路规划图。
具体实施方式
[0061]
以下结合实施例和附图对本发明进行详细描述,但需要理解的是,所述实施例和附图仅用于对本发明进行示例性的描述,而并不能对本发明的保护范围构成任何限制。所有包含在本发明的发明宗旨范围内的合理的变换和组合均落入本发明的保护范围。
[0062]
以下具体实施方式中涉及的一些术语或缩写名称等包括:
[0063]
风险地图(riskmap):
[0064]
风险地图为由多个反映自身风险代价值的小区域(单元格)形成的组合区域图,通常来说是一个二维的平面图,其中所述风险代价值是反映智能空地载具对地面行人的威胁程度的量化值,即若在该地图上避开高风险代价值区域飞行,则能得到安全可靠的航线。
[0065]
在以下实施方式中,定义所述风险地图的每一个单元ai(i∈(1,2
…
n))的大小为(100
×
100)m2,每一个单元对应风险值大小为ri。
[0066]
遮蔽系数:
[0067]
遮蔽系数是一个用来衡量一个区域内的遮蔽物如建筑物或树木对地面行人的遮挡程度的正值。
[0068]
智能空地融合载具或智能空地载具:
[0069]
其指可融合传统小汽车、客车和运输货车与低空飞行器的载具,其可实现传统汽车与飞机、路网资源与空域资源的融合与有序对接,具备地面路网行驶、垂直起降、低空飞行等功能。
[0070]
根据本发明的技术方案,一种具体的风险地图构建方法包括:
[0071]
s1获得栅格化的区域图;
[0072]
s2在栅格化的区域图上标记禁飞区域;
[0073]
s3确定每个栅格内载具的自身失效坠落概率p
inv
;
[0074]
s4确定每个栅格内载具坠落后撞击到地面行人的概率p
imp
;
[0075]
s5确定每个栅格内行人受到的撞击后的致死概率p
fat
;
[0076]
s6基于s3-s5所得概率,确定每个栅格内撞击点对行人造成的总伤亡概率p;
[0077]
s7根据总伤亡概率p的排序,确定某一栅格的相对风险等级,即其风险代价值,并得到所述风险地图。
[0078]
其中,更具体的一些实施方式如:
[0079]
步骤s2中,所述禁飞区域可包括机场、军事基地;自然敏感区域,如一些国家生态公园;城市内的特别拥挤的区域,如经常有公共活动的区域及一些主广场;及学校区域等。其标记方法可如将其对应的栅格使用特殊的颜色进行填涂,如附图1所示(原图填涂颜色为红色)。
[0080]
步骤s3中,所述载具的自身失效坠毁概率p
inv
为与碰撞无关的概率,基于智能空地载具内部自成一个完整的系统,且该运行系统是串联式的,即某一元件或某一功能发生失
效的时候就会导致智能空地载具坠毁,如电路故障、桨叶失效等特点,可通过获取某类飞行器子系统和/或元件的失效概率,最终将各个子系统和/或元件的失效率相加得到整个系统的失效率,即其失效坠毁概率。
[0081]
进一步的,其中所述子系统包括操作系统、飞控系统、记载系统、显示系统等。
[0082]
所述子系统和/或元件的失效概率的获得可通过专家知识库和/或通过对行业内的专家进行的问卷调查等方式实现。更具体如,所述子系统和/或元件的失效概率可通过对载具生产人员、航空领域资深专家等人员以问卷调查的形式获得。
[0083]
步骤s4中,所述载具撞击到地面行人的概率p
imp
受人口密度的影响,如人口密度越高的区域,载具坠落则越容易撞击到行人。在此基础上,通过如附图2所示的模型获得该概率,模型设置包括:
[0084]
考虑到气流影响,设定所述智能空地载具与地面成一定的角度θ俯冲坠落;
[0085]
设定其坠落后与地面撞击区域的人口密度是一致的,为ρ;
[0086]
其坠落的区域内的行人平均身高为h
p
,则载具在坠落过程中,在没有完全坠地之前就会与行人相撞;
[0087]
智能空地载具撞击到行人的概率以其坠落后至少撞到一个行人的概率来表示。
[0088]
进一步的,所述载具撞击到地面行人的概率p
imp
可具体通过以下模型得到:
[0089]
n=s
imp
*ρiꢀꢀꢀꢀꢀꢀ
(1);
[0090][0091][0092]
其中,n表示暴露在坠落区域内的行人数量,s
imp
表示撞击区域面积,s表示栅格的面积,wc表示载具的平均宽度,lc表示载具的平均长度,θ表示智能空地载具坠落时的滑翔角度,ρi表示第i个栅格区域的人口密度,表示单个行人的平均占地面积。
[0093]
根据以上模型,在一种具体实施例中,如附图6所示,基于载具尺寸及滑翔角度,载具坠落的伤害范围都落在一个栅格范围内;在另一种具体实施例中,如附图7所示,载具坠落的伤害范围包含两个栅格区域,这时可将两个栅格区域等效为一个新的栅格,以两个栅格内人口密度的平均值作为该等效栅格的人口密度。
[0094]
在上述两个实施例中,以rc表示载具坠落后,由于自身的体积大小造成的伤害范围的半径,即附图中内圈大小,以r
p
表示行人的平均半径即以单个行人双肩宽度的1/2,一般取值为0.5m,附图中外圈圆的大小则表示考虑行人高度时,坠落载具造成的伤害范围,则针对附图7所表示的实施例,有:
[0095]
其中,ρj表示第j个栅格区域的人口密度。
[0096]
进一步的,在栅格化了的地图上,坠落撞击涉及的栅格最多为4个,当涉及多栅格的情况,类似的,取多个栅格的平均人口密度作为虚拟栅格的人口密度。
[0097]
进一步的,不同栅格区域的人口密度可根据城区土地用地性质及城市类型大小进行设定,如:
[0098]
用地性质代表人口密度居住用地住宅区、社区中心等α工业用地类工厂、公司、产业园等β绿地广场类城市广场、公园、动物园等γ
[0099]
步骤s5中,所述行人受到的撞击后的致死概率p
fat
与所述遮蔽系数及载具撞击时的动能有关。其中,所述遮蔽系数可反映撞击区域内受威胁行人的暴露程度,当其代表的遮挡程度越高时,表明行人受到的遮挡保护越良好,其致死率就越低,反之则越高;所述载具撞击时的动能,取决于其撞击时的瞬时速度,在具体实施中,可以最大运行速度(v
max-operation
)增加40%的值代替所述瞬时速度。
[0100]
进一步的,所述撞击后的致死概率p
fat
可具体通过以下模型得到:
[0101][0102]
其中,f表示所述遮蔽系数,它是一个正值,处于0-1之间;e
0.5
表示当所述遮蔽系数为0.5时,死亡率达到50%所需要的撞击能量;e0表示当所述遮蔽系数为0时,造成死亡所需要的撞击能量;e
imp
表示所述载具撞击地面时的能量,且:
[0103]eimp
=mc*[v
max-operation
*(1+0.4)]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0104]
其中,v
max-operation
表示载具最大飞行速度,mc表示载具的质量。
[0105]
进一步的,以上模型中,e
0.5
及e0可选择指定的常数,根据发明人的创造性研究,可选择如e
0.5
=106j、e0=100j。
[0106]
不同区域遮蔽系数的确认,可以根据arcgis获取城市的高程信息,建筑布局等信息,再根据下表遮蔽系数特征,从而划分不同区域的遮蔽系数参数分布:
[0107]
特征遮蔽系数无遮挡0稀疏树木0.25有车辆及低建筑0.5高建筑物0.75全面覆盖建筑1
[0108]
步骤s7中,设定每个步骤发生的概率事件都是相互独立的,则所述总伤亡概率p可通过以下模型获得:
[0109]
p=p
inv
×
p
imp
×
p
fat
ꢀꢀꢀꢀ
(7)。
[0110]
在一个具体实施例中,基于图1所示的禁飞区,通过上述步骤s1-s7获得的风险地图如图3所示,其具体包括:将所得总伤亡概率p进行排序,按排序的前后或其代表的程度的高低对栅格进行填涂,由颜色的深浅程度代表风险代价值的高低。
[0111]
基于上述风险地图,本发明进一步提供了一种具体的航路规划方法,其包括通过改进的蚁群算法获得风险代价最低的航路。
[0112]
更具体的,如附图4所示,其包括:
[0113]
s101初始化蚁群;
[0114]
s102将所得风险地图中所述风险代价值低的区域的初始信息素进行加强,得到初始信息素非均匀分配的风险地图;
[0115]
其中,更具体的,所述非均匀分配通过以下模型实现:
[0116][0117]
其中r表示栅格点初始风险代价值,r表示风险代价值分配阈值,其取值为所述总伤亡概率排序或所述风险代价值的15%位数~30%位数。
[0118]
s103使用初始化的蚁群对所述初始信息素非均匀分配的风险地图进行全局寻优,得到最优航路;
[0119]
更具体的,其包括:
[0120]
由放置于所述非均匀分配地图起点的蚂蚁读取其状态转移概率;
[0121]
根据所述状态转移概率,应用蚂蚁决策确定其转移到新的状态;
[0122]
至循环结束后生成第一路线,并更新信息素及蚂蚁路由表;
[0123]
至迭代达到最大次数后,得到性能最优的航路。
[0124]
其中,更具体的,所述状态转移概率通过以下模型得到:
[0125][0126]
其中,表示在t时刻、蚂蚁k在栅格点i处选择栅格点j的概率,τ
ij
(t)表示信息素浓度,η
ij
表示启发式因子,其通过i节点到j节点的欧拉距离的倒数计算得到,jk表示下一时刻可以转移的所有节点集合,表示转移函数中的指引函数,α、β分别表示蚂蚁在运动中所积累的信息和启发信息在选择路径中的相对重要程度。
[0127]
信息素的更新通过以下模型实现:
[0128][0129]
λ(t)=max[ελ(t-1),λ
min
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0130]
τ
ij
(t+δt)=[1-λ(d)-λ(t)]*τ
ij
(t)+δτ
ij
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0131]
其中,λ表示动态挥发系数,λ
min
表示最小挥发系数,d
mid
、d
min
分别表示蚂蚁在某一次迭代过程中所走路径的平均值及最小值,δ表示常数,ε表示衰减因子。
[0132]
根据以上过程完整获得最优航路的流程如图5所示。
[0133]
在一个具体实施例中,根据本发明构建的风险地图获得的最优航路图如附图8所示。
[0134]
以上各实施方式仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施方式。凡属于本发明思路下的技术方案均属于本发明的保护范围。应该指出,对于本
技术领域的普通技术人员来说,在不脱离本发明原理的前提下的改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1