一种开放式货运车辆全特征检测设备和方法与流程
1.本发明涉及一种用于检测开放式货运车三维几何信息的设备以及方法。
背景技术:
2.随着自动化机器换人步伐的加快,自动化行业对于精准三维检测的需求日益突出,在全自动物料装车、无人化车辆检测等应用领域,对于车辆的快速高精度三维几何信息检测已经十分迫切。水泥、矿料、化肥等生产企业装车现场工作环境较为复杂,待装车辆几何尺寸、车辆结构多种多样,实现待装车辆全特征检测可有效提升自动装车的车型适应性,同时能够有效提升装车过程的安全性。
3.现有开放式货运车的三位几何信息检测一般采用的是基于图像的特城检测和尺寸检测。但图像化检测受环境干扰较大,精度难以保证,在实际应用中具有较大的局限性,因此急需一种精度高、快速成像和抗干扰能力强的检测手段。
技术实现要素:
4.有鉴于此,本发明提供一种开放式货运车辆全特征检测设备和方法,对开放式货运车辆进行实现精度高、快速成像和抗干扰能力强的全特征检测。
5.为解决以上技术问题,本发明的技术方案为:一种开放式货运车辆全特征检测设备,包括:激光扫描仪,利用激光对目标进行扫描;驱动机构,用于驱动激光扫描仪旋转形成扫描面;控制系统,用于对激光扫描仪和驱动机构进行控制完成扫描,并对激光扫描仪采集到的数据进行处理。
6.作为一种改进,电控旋转台,用于驱动激光扫描仪360
°
旋转;增量式编码器,用于检测激光扫描仪旋转角度。
7.作为一种改进,所述控制系统为嵌入式系统,包括:控制单元,用于控制电控旋转台、测量式编码器以及激光扫描仪;数据采集和处理单元,用于对激光扫描仪、增量式编码器采集到的数据进行处理;对外接口,与外部系统连接用于电源供给和网络通信。
8.本发明还提供一种开放式货运车辆全特征检测方法,包括:进行点云检校,获取修正参数;进行安装检校,获取安装参数;对目标进行点云扫描;引入修正参数、安装参数进行点云计算;对点云进行分类提取,完成三维几何信息的获取。
9.作为一种改进,所述点云检校包括:对参照物进行点云扫描;输入扫描仪断面数据、360
°
旋转角度数据、点云检校参数,对扫描到的参照物点云进行点云计算;根据点云计算与实际参照物进行对比的结果调整修正参数,当点云无错位时确定修正参数。
10.作为一种改进,所述点云检校参数为c=[σr,σ
p
,δ
x
,δy],σr为激光扫描仪安装的横滚角度偏差,σ
p
为激光扫描仪安装的俯仰角度偏差,δ
x
和δy为激光扫描仪在电控旋转台平面上的安装偏心量。
[0011]
作为一种改进,所述对扫描到的参照物点云进行点云计算为:
[0012]
由公式ii计算修正安装偏心量,
[0013][0014]
采用转台旋转角度β构建矩阵rz,
[0015][0016]
取安装角度检校参数构建矩阵r
x
、ry,
[0017][0018][0019]
利用公式i进行点云计算,
[0020][0021]
作为一种改进,所述安装检校包括:对车道进行点云扫描;确定激光扫描仪安装航向角;确定激光扫描仪安装俯仰角;确定激光扫描仪安装横滚角;确定激光扫描仪安装高度参数;输出安装参数。
[0022]
作为一种改进,所述确定激光扫描仪安装航向角包括:
[0023]
取左右边界点云pa和pv在xy平面拟合直线la和lv,取两条直线斜率均值计算车道在扫描仪坐标系中的朝向角αm,进而构建朝向标定旋转矩阵mc;
[0024]
所述确定激光扫描仪安装俯仰角包括:
[0025]
取经mc旋转后满足-σ
x
<x<σ
x
,-σy<y<σy,σy<σ
x
的点,拟合xz平面直线,取直线斜率计算安装俯仰角βm,构建俯仰标定矩阵m
p
;
[0026]
所述确定激光扫描仪安装横滚角包括:
[0027]
取经m
p
旋转后满足-σ
x
<x<σ
x
,-σy<y<σy,σ
x
<σy的点云,拟合yz平面直线,计算横滚角γ,构造横滚标定矩阵mr;
[0028]
所述确定激光扫描仪安装高度包括:
[0029]
采用mr修正安装横滚角,取修正后点云正下方边长为ε的正方形范围内的点,取高程均值作为设备安装高度参数。
[0030]
作为一种改进,所述对点云进行分类提取包括:对车厢内底板点云进行提取;对车厢栏板点云进行提取;对车厢立柱点云进行提取;对车厢拉筋点云进行提取;对车厢油缸点云进行提取。
[0031]
作为一种改进,所述对车厢内底板点云进行提取包括:
[0032]
点云高程网格化,取最大密度高程h
max
;
[0033]
取高程在[h
max-δh,h
max
+δh]范围内的点集pf;
[0034]
获取车厢内底板点云,并计算车厢外轮廓线;
[0035]
判断外轮廓线内是否为空,如果是则将轮廓线内移并继续判断直到不为空,如果不是则判断轮廓线上点云是否连续,如果不连续侧将轮廓线内移并判断直到连续,如果连续则定位该轮廓线对应的车厢内底板轮廓。
[0036]
作为一种改进,所述的一种开放式货运车辆全特征检测方法,其特征在于所述计算车厢外轮廓线包括:
[0037]
以点云pf在多个不同方向的投影,拟合5条直线,
[0038][0039]
其中,l
xz
为pf在xz平面投影所构成的直线,l
xyl
、l
xyr
、l
yxf
和l
yxt
分别为pf在xy平面投影后的左右和前后最大外轮廓直线。
[0040]
作为一种改进,所述对车厢栏板点云进行提取和对车厢立柱点云进行提取包括:
[0041]
取栏板的平面投影点云,其中左右栏板为xz平面上的投影点云,前后栏板为yz平面上的投影点云;
[0042]
将左右栏板在xz平面上的投影点云沿x轴分段,将前后栏板在yz平面上的投影点云沿y轴分段,计算每个分段内点云的最低高程h
m,min
和最高高程h
m,max
;
[0043]
以高程位于h
m,min
±
δh范围内的点拟合栏板下轮廓直线l
ref
;
[0044]
取l
ref
斜率作为上轮廓斜率参考值,取h
m,max
高程均值最大值作为xz平面直线截距,构造上边线直线l
uedg
,向下构造直线,直到连续。
[0045]
以l
uedg
直线为基准,将栏板点云分为边线以下点云p
below
、边线上点云p
on
和边线以上点云p
beyond
三类;
[0046]
取p
below
和p
on
点作为车辆栏板点云,取p
beyond
为车辆立柱点云;
[0047]
取p
beyond
为车辆立柱点云,分割出立柱点云。将p
beyond
沿x和y轴区分为多个非连续区间,对每一个区间内的点云高程差进行判别,将满足高程差阈值的点云集合作为不同立柱点云。
[0048]
作为一种改进,所述对车厢拉筋点云进行提取和对车厢油缸点云进行提取包括:
[0049]
取车厢内点云集合p
inner
的xy平面投影,以后栏板作为参考线l
ref
,沿x轴提取若干具有间隔、在y方向连续的上边界线,对每一个上边界点云集合做高程判断;
[0050]
对于每个分段区间内的点集合pi,按照如下规则进行判断
[0051]
若pi在x轴方向靠近车头,且在y方向连续区间的跨度小于车宽的1/2,判断该点为油缸;
[0052]
若pi在x轴方向靠近车头,且在y方向连续区间的跨度大于车宽的1/2,pi集合高程接近车厢底板高,判断该点为无效;
[0053]
若pi在x轴方向远离车头,且在y方向连续区间的跨度大于车宽的1/2,pi集合高程大于车厢底板高度,判断该点为拉筋。
[0054]
本发明的有益之处在于:具有上述结构的检测设备和检测方法,精度高、快速成像和抗干扰能力强的优势,在重尘环境下可保持稳定的检测效果,适用于水泥、矿料、化肥等
生产企业较为复杂装车现场工作环境,实现待装车辆全特征检测可有效提升自动装车的车型适应性,同时能够有效提升装车过程的安全性。
附图说明
[0055]
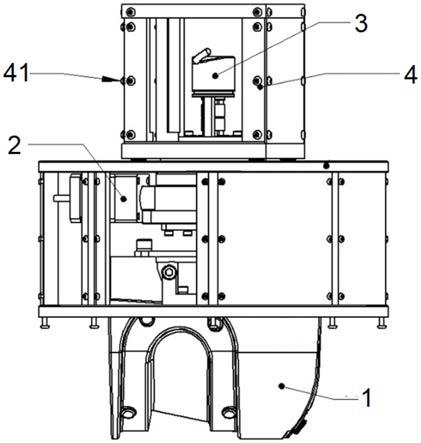
图1为本发明的外观结构示意图。
[0056]
图2为本发明的原理图。
[0057]
图3为本发明中点云检校的流程图。
[0058]
图4为本发明中安装检校的流程图。
[0059]
图5为全局坐标系示意图。
[0060]
图6为车厢底板点云提取流程图。
[0061]
图7为栏板和立柱点云提取流程图。
[0062]
图中标记:1激光扫描仪、2电控旋转台、3增量式编码器、4嵌入式系统、41对外接口。
具体实施方式
[0063]
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合具体实施方式对本发明作进一步的详细说明。
[0064]
如图1、图2所示,本发明提供一种开放式货运车辆全特征检测设备,包括:激光扫描仪1,利用激光对目标进行扫描;驱动机构,用于驱动激光扫描仪旋转形成扫描面;控制系统,用于对激光扫描仪和驱动机构进行控制完成扫描,并对激光扫描仪采集到的数据进行处理。
[0065]
具体地,驱动机构包括:电控旋转台2,用于驱动激光扫描仪360
°
旋转;增量式编码器3,用于检测激光扫描仪旋转角度。
[0066]
本实施例中,控制系统为嵌入式系统4,包括:控制单元,用于控制电控旋转台2、测量式编码器3以及激光扫描仪1;数据采集和处理单元,用于对激光扫描仪1、增量式编码器3采集到的数据进行处理;对外接口41,与外部系统连接用于电源供给和网络通信。
[0067]
本发明还提供一种开放式货运车辆全特征检测方法,包括:
[0068]
s1进行点云检校,获取修正参数;
[0069]
s2进行安装检校,获取安装参数;
[0070]
s3对目标进行点云扫描;引入修正参数、安装参数进行点云计算;
[0071]
s4对点云进行分类提取,完成三维几何信息的获取。
[0072]
在理想的情况下,设激光扫描仪极坐标表述为(α,d),α为出射角度,d为测量距离,电控转台角度βi来自于增量式编码器。在标准的三维坐标系中,点云计算为:
[0073][0074]
然而在实际情况下,安装误差、加工误差等因素会引入误差,误差的主要来源包括:
[0075]
(1)扫描仪和电控转台的相对姿态差,包括扫描仪横滚和俯仰角度偏差;
[0076]
(2)扫描仪中心点与旋转中心的偏移。
[0077]
参见图3,为修正生产装配中引入的误差必须进行点云校验,其具体步骤为:
[0078]
s11对参照物进行点云扫描;
[0079]
s12输入扫描仪断面数据、360
°
旋转角度数据、点云检校参数,对扫描到的参照物点云进行点云计算。
[0080]
s121引入检校参数c=[σr,σ
p
,δ
x
,δy],σr和σ
p
为激光扫描仪安装的横滚和俯仰角度偏差,δ
x
和δy为扫描仪在转台平面上的安装偏心量。点云检校参数引入后,点云计算方法为:
[0081]
s122由式计算ps,修正安装偏心量:
[0082][0083]
s123采用转台旋转角度β构建矩阵rz:
[0084][0085]
s124取安装角度检校参数构建矩阵r
x
、ry:
[0086][0087][0088]
s125再将上述参数带入,利用公式i进行点云计算,
[0089][0090]
s13根据点云计算与实际参照物进行对比的结果调整修正参数,当点云无错位时确定修正参数。
[0091]
检校参数的计算采用尝试法完成,选取墙面、墙角等作为参考特征,通过二分法确定检校参数,参数调整的主要依据包括:
[0092]
(1)平面点云厚度小;
[0093]
(2)转台旋转角度0~π和π~2π内的两片点云重合。
[0094]
安装检校完成检测设备在现场的安装参数计算。为保证车厢内无盲区扫描,检测设备安装于车道上方,其车道平面的投影点位于车辆车厢内。全局坐标系定义如图5所示,系统标定参数包括:
[0095]
(1)激光扫描仪安装航向角,即相对于车道两侧边界的方位角度;
[0096]
(2)激光扫描仪安装俯仰角,即相对于车道平面的俯仰角;
[0097]
(3)激光扫描仪安装横滚角,即相对于车道平面的横滚角;
[0098]
(4)竖直方向的安装高度;
[0099]
参见图4,安装检校参数计算的具体步骤包括:
[0100]
s21对车道进行点云扫描;
[0101]
s22确定激光扫描仪安装航向角;取左右边界点云pa和pv在xy平面拟合直线la和lv,取两条直线斜率均值计算车道在扫描仪坐标系中的朝向角αm,进而构建朝向标定旋转矩阵mc;
[0102]
s23确定激光扫描仪安装俯仰角;取经mc旋转后满足
[0103]-σ
x
<x<σ
x
,-σy<y<σy,σy<σ
x
的点,拟合xz平面直线,取直线斜率计算安装俯仰角βm,构建俯仰标定矩阵m
p
;
[0104]
s24确定激光扫描仪安装横滚角;取经m
p
旋转后满足
[0105]-σ
x
<x<σ
x
,-σy<y<σy,σ
x
<σy的点云,拟合yz平面直线,计算横滚角γ,构造横滚标定矩阵mr;
[0106]
s25确定激光扫描仪安装高度参数;采用mr修正安装横滚角,取修正后点云正下方边长为ε的正方形范围内的点,取高程均值作为设备安装高度参数。
[0107]
s26输出安装参数。
[0108]
对货运车辆进行点云扫描后,引入修正参数、安装参数进行点云计算。点云计算完毕后还要对计算出来的点云进行分类提取,包括:
[0109]
s41对车厢内底板点云进行提取;
[0110]
s42对车厢栏板点云进行提取;对车厢立柱点云进行提取;
[0111]
s43对车厢拉筋点云进行提取;对车厢油缸点云进行提取。
[0112]
具体地,对车厢内底板点云进行提取包括以下步骤:
[0113]
s411点云高程网格化,取最大密度高程h
max
;
[0114]
s412取高程在[h
max-δh,h
max
+δh]范围内的点集pf;
[0115]
s413获取车厢内底板点云,并计算车厢外轮廓线;以点云pf在多个不同方向的投影,拟合5条直线,
[0116][0117]
其中,l
xz
为pf在xz平面投影所构成的直线,l
xyl
、l
xyr
、l
yxf
和l
yxt
分别为pf在xy平面投影后的左右和前后最大外轮廓直线。
[0118]
s414判断外轮廓线内是否为空,如果是则将轮廓线内移并继续判断直到不为空,如果不是则判断轮廓线上点云是否连续,如果不连续侧将轮廓线内移并判断直到连续,如果连续则定位该轮廓线对应的车厢内底板轮廓。
[0119]
对车厢栏板点云进行提取和对车厢立柱点云进行提取的具体步骤参见图6包括:
[0120]
s421取栏板的平面投影点云,其中左右栏板为xz平面上的投影点云,前后栏板为yz平面上的投影点云;
[0121]
s422将左右栏板在xz平面上的投影点云沿x轴分段,将前后栏板在yz平面上的投影点云沿y轴分段,计算每个分段内点云的最低高程h
m,min
和最高高程h
m,max
;
[0122]
s423以高程位于h
m,min
+δh范围内的点拟合栏板下轮廓直线l
ref
;
[0123]
s424取l
ref
斜率作为上轮廓斜率参考值,取h
m,max
高程均值最大值作为xz平面直线截距,构造上边线直线l
uedg
,向下构造直线,直到连续。
[0124]
s425以l
uedg
直线为基准,将栏板点云分为边线以下点云p
below
、边线上点云p
on
和边线以上点云p
beyond
三类;
[0125]
s426取p
below
和p
on
点作为车辆栏板点云,取p
beyond
为车辆立柱点云;
[0126]
s427取p
beyond
为车辆立柱点云,分割出立柱点云。将p
beyond
沿x和y轴区分为多个非连续区间,对每一个区间内的点云高程差进行判别,将满足高程差阈值的点云集合作为不同立柱点云。
[0127]
剔除底板、栏板和立柱分割后的点云后,车厢内部点云包含了车辆前端的油缸和内部拉筋。油缸位置固定,与前栏板连接;拉筋分布在车厢内部,成多条近似平行的直线。对车厢拉筋点云进行提取和对车厢油缸点云进行提取的具体步骤包括:
[0128]
s431取车厢内点云集合p
inner
的xy平面投影,以后栏板作为参考线l
ref
,沿x轴提取若干具有间隔、在y方向连续的上边界线,对每一个上边界点云集合做高程判断;
[0129]
s432对于每个分段区间内的点集合pi,按照如下规则进行判断
[0130]
1.若pi在x轴方向靠近车头,且在y方向连续区间的跨度小于车宽的1/2,判断该点为油缸;
[0131]
2.若pi在x轴方向靠近车头,且在y方向连续区间的跨度大于车宽的1/2,pi集合高程接近车厢底板高,判断该点为无效;
[0132]
3.若pi在x轴方向远离车头,且在y方向连续区间的跨度大于车宽的1/2,pi集合高程大于车厢底板高度,判断该点为拉筋。
[0133]
规则1将油缸和拉筋进行了区分,规则2则主要针对车厢底部及其不规则(前后上翘的情况)的情况进行了约束,防止前后出现车厢底部被识别为拉筋的问题。
[0134]
至此,开放式货运车辆车厢全部特征被检测并识别提取,计算了车辆每个特征的几何参数,几何参数可作为装车机自动避障参考。
[0135]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1