一种检测农用拖拉机工作部作业情况的传感器系统的制作方法
1.本发明属于农用设备技术领域,更具体地说,尤其涉及一种检测农用拖拉机工作部作业情况的传感器系统。
背景技术:
2.农用拖拉机,用于农业生产的拖拉机。按功能可分:通用型,主要用于大田作业;中耕型,用于作物行间中耕;园艺型,用于庭园、果园、苗圃等;水田型,用于水稻田作业;坡地型,用于山坡地作业;集材型,用于林区集材和运输作业。
3.一般都会对农用拖拉机尾端装配有用于农耕或翻土的工作部,来随着农用拖拉机移动进行持续的往返下压动作,目前常见的对应检测方法难以对农用拖拉机的工作部作业范围进行实时精确检测,难以确定工作部农用作业时的有效性。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,通过增设辅助杆结构来配合相应的角度传感器,角度传感器的检测最大度数即与工作部的下压极限距离对应,反之则与工作部的抬升最高距离对应,通过此种方式来有效检测工作部的作业范围数值。
5.为实现上述目的,本发明提供如下技术方案:
6.一种检测农用拖拉机工作部作业情况的传感器系统,包括如下步骤:
7.s1.在农用拖拉机主体的尾端装配有相应的工作部,且拖拉机主体上安装有与工作部对应的驱动组件,能够使得工作部能够受驱动重复下压和抬升动作;
8.s2.在拖拉机主体的尾端活动铰接有辅助杆,且将辅助杆的另一端活动铰接至工作部的一侧表面,且需要控制工作部在闲置状态下,辅助杆将处于水平横置状态;
9.s3.将角度传感器安装至辅助杆的表面,并启动驱动组件使得工作部开始运动,随着工作部的下移,辅助杆的一端连同角度传感器随之下移,期间角度传感器对偏移角度进行检测,由工作人员对角度传感器所检测的数据进行实时收集观察;
10.s4.角度传感器所检测到的角度变化范围即反映了工作部的作业数值范围,在工作部的单次往返运动过程中,当工作部到达此次动作最低位置时,辅助杆的端部偏移幅度也达到最大,此时角度传感器的检测最大度数即与工作部的下压极限距离对应,反之则与工作部的抬升最高距离对应,通过此种方式来有效检测工作部的作业范围数值;
11.s5.综上所述,通过工作人员对角度传感器的持续监测数值进行计算,能够利用角度传感器配合辅助杆来了解工作部的多次动作的作业范围,若角度传感器的检测数值幅度趋于平均,即说明工作部的作业范围及作业效率有所保障。
12.优选的,所述s1中工作部受驱动组件操作时的下压动作的最低处低于拖拉机主体的车轮底部,抬升动作的最高处与辅助杆的表面呈同一水平线。
13.优选的,所述s2中辅助杆在自身与拖拉机主体的铰接处开设有条形孔,以此来预留一定的调节空间,在辅助杆的一端受工作部影响进行移动调节时,避免辅助杆与拖拉机
主体的连接端被直接拉扯受损。
14.优选的,所述s3中角度传感器的安装位置需靠近辅助杆与工作部的连接处,以使得角度传感器能够有效检测到辅助杆的偏移幅度,起到良好的角度检测效果。
15.优选的,所述s5中若单次角度检测所耗时间大于上一次检测时间,则说明此次工作部的动作稍慢,若连续出现此类情况则需要对装置整体进行维护。
16.优选的,所述工作部的底端表面呈锥形,能够在受驱动下压时对地面有效施压以起到作业效果。
17.本发明的技术效果和优点:
18.1、本发明通过增设辅助杆结构来配合相应的角度传感器,使其能够配合工作过程中的工作部进行检测,在工作部进行往返运动工作时,利用角度传感器对传动的辅助杆偏移角度进行检测,并将角度检测度数的区间与工作部往返动作的距离幅度进行关联,角度传感器的检测最大度数即与工作部的下压极限距离对应,反之则与工作部的抬升最高距离对应,通过此种方式来有效检测工作部的作业范围数值。
19.2、能够利用角度传感器配合辅助杆来了解工作部的多次动作的作业范围,若角度传感器的检测数值幅度趋于平均,即说明工作部的作业范围及作业效率有所保障。
附图说明
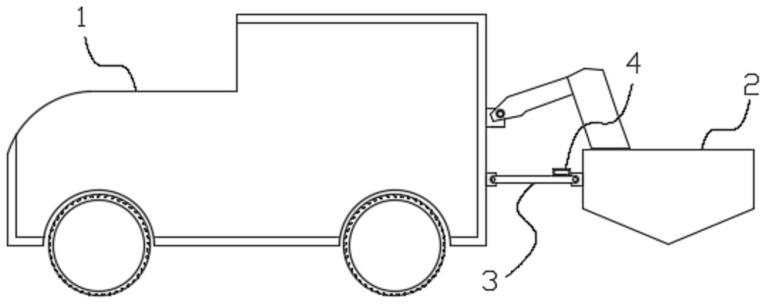
20.图1为本发明的一种检测农用拖拉机工作部作业情况的传感器系统工作图。
21.附图标记说明:1、拖拉机主体;2、工作部;3、辅助杆;4、角度传感器。
具体实施方式
22.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.请参阅图1,本发明提供了一种检测农用拖拉机工作部作业情况的传感器系统,包括如下步骤:
24.s1.在农用拖拉机主体1的尾端装配有相应的工作部2,工作部2的底端表面呈锥形,能够在受驱动下压时对地面有效施压以起到作业效果,且拖拉机主体1上安装有与工作部2对应的驱动组件,能够使得工作部2能够受驱动重复下压和抬升动作,工作部2受驱动组件操作时的下压动作的最低处低于拖拉机主体1的车轮底部,抬升动作的最高处与辅助杆3的表面呈同一水平线;
25.s2.在拖拉机主体1的尾端活动铰接有辅助杆3,且将辅助杆3的另一端活动铰接至工作部2的一侧表面,且需要控制工作部2在闲置状态下,辅助杆3将处于水平横置状态,辅助杆3在自身与拖拉机主体1的铰接处开设有条形孔,以此来预留一定的调节空间,在辅助杆3的一端受工作部2影响进行移动调节时,避免辅助杆3与拖拉机主体1的连接端被直接拉扯受损;
26.s3.将角度传感器4安装至辅助杆3的表面,并启动驱动组件使得工作部2开始运动,随着工作部2的下移,辅助杆3的一端连同角度传感器4随之下移,期间角度传感器4对偏
移角度进行检测,由工作人员对角度传感器4所检测的数据进行实时收集观察,角度传感器4的安装位置需靠近辅助杆3与工作部2的连接处,以使得角度传感器4能够有效检测到辅助杆3的偏移幅度,起到良好的角度检测效果;
27.s4.角度传感器4所检测到的角度变化范围即反映了工作部2的作业数值范围,在工作部2的单次往返运动过程中,当工作部2到达此次动作最低位置时,辅助杆3的端部偏移幅度也达到最大,此时角度传感器4的检测最大度数即与工作部2的下压极限距离对应,反之则与工作部2的抬升最高距离对应,通过此种方式来有效检测工作部2的作业范围数值;
28.s5.综上所述,通过工作人员对角度传感器的持续监测数值进行计算,能够利用角度传感器4配合辅助杆3来了解工作部2的多次动作的作业范围,若角度传感器4的检测数值幅度趋于平均,即说明工作部2的作业范围及作业效率有所保障,若单次角度检测所耗时间大于上一次检测时间,则说明此次工作部2的动作稍慢,若连续出现此类情况则需要对装置整体进行维护。
29.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1