基于深度回归网络的雷达海浪参数测量方法与流程
1.本发明属于海浪参数无线电测量技术领域,尤其涉及一种新型的基于深度回归网络的雷达海浪参数测量方法。
背景技术:
2.随着世界人口的增长、环境的恶化,以及陆地上资源大量消耗,世界各国开始把开发海洋作为重要战略,开发海洋的“蓝色革命”已经形成,我国也加快了对海洋开发与研究。
3.在对海洋资源的开发和利用中,人类迫切需要了解海洋的各种运动现象(如潮、流、浪等),对海浪的环境参数进行监测及深入研究海洋参数的监测方法已势在必行,海洋中海浪对海上作业及资源开发的影响最大。海浪参数的准确测量对航路选择、船舶航行安全、海洋安全、海洋军事科学技术以及海洋灾害防治等方面具有重要意义。针对海洋全方位、立体监测需求,需要研究海洋监测技术及海洋参数测试仪器,为海洋的保护和开发提供技术保障。
4.通过测波雷达可以进行实时遥测海浪,具有实时、成本低、便捷、易操作的特点。雷达获得的雷达回波图像中包含的海浪回波信息异常丰富,具有较高的分辨率。深度神经网络最近成为解决各种工程问题的一个研究热点,并在很多研究领域获得了成功应用。深度神经网络通过在复杂数据集上进行学习,能获得数据集上高层次的特征信息,从而大大提高了多个科学领域中诸多难题解决的现有技术水平。利用 dnn网络来进行海浪参数估计,能获得比传统方法更高的准确性和稳定性。
技术实现要素:
5.本发明提供了一种基于深度回归网络的雷达海浪参数测量方法,采用深度回归网络对雷达回波数据进行处理,从而获得海浪参数信息,即有效波高、波峰周期、波峰峰向、流速和流向,是一种新型的 x波段海浪参数测量方法,改变了传统雷达测波处理方式,将人工智能方法带入雷达测波。
6.本发明是通过以下技术方案实现的:
7.基于深度回归网络的雷达海浪参数测量方法,包括以下步骤:
8.(1)雷达通过天线发射射频调制脉冲信号,射频脉冲遇到目标物体后被反射,再经天线接收,通过环形器进入雷达接收通道,射频回波信号经限幅器限幅后,由射频前端低噪声放大、下变频为中频调制信号,雷达通过抗干扰、脉冲压缩等信号处理后获得海杂波回波图像数据;
9.(2)对步骤(1)中雷达获得的海杂波回波进行选取,选取海杂波特征明显的区域进行海浪参数反演;
10.(3)对步骤(2)选取的测量区域获得的海杂波数据进行抗干扰信号处理,去除同频异步干扰,结合目标检测去除舰船等目标回波,以及滤除云雨等气象杂波信号,并通过小波变换去除噪声;
11.(4)对经过步骤(3)处理的测量区域获得的海杂波数据进行坐标转换,采用技术将雷达获得的距离-角度极坐标系数据转换为直角坐标系数据;
12.(5)对步骤(4)传递进来的在直角坐标系下的待反演数据,进行时-频转换;
13.(6)将经过步骤(5)处理的三维谱数据输入训练好的深度回归网络获得浪高、浪向、浪周期、流速和流向信息,在使用进行计算之前需要利用浮标标定好的雷达三维谱数据对深度回归网络进行训练。
14.作为优选实施例,所述步骤(3)中的小波变换去除噪声的步骤如下:
15.(a)对回波图像二维小波分解,并选择小波基进行三层分解;
16.(b)对分解后高频系数进行阈值量化,选择合适的阈值;
17.(c)重构经过量化处理的小波信号,获得去噪后的回波图像。
18.作为优先实施例,所述步骤(5)中利用三维傅里叶变换将其进行时-频转换:
[0019][0020]
将图像序列从时间和空间域转化到波数频率域,三维波数频率能量谱:
[0021][0022]
作为优选实施例,所述步骤(6)中的深度回归网络的配置,包括如下步骤:
[0023]
(ⅰ)深度回归网络的输入是雷达回波数据经过3维fft后的3 维数据,该3维数据是待测区域坐标转换后的图像序列。数据大小与待测区域大小以及海浪观测积累次数决定;
[0024]
(ⅱ)第一层卷积层包含32个卷积核,每个卷积核的大小为5
×
5。第二层卷积层包含16个卷积核,每个卷积核大小为32
×3×
3;
[0025]
(ⅲ)两个池化层都采用的都是最大池化函数,池化滤波器的大小是3
×
3,池化层的步进是2;
[0026]
(ⅳ)第一层全连接层有30个网络节点,第二个全连接层作为整个深度回归网络的的输出层,拥有5个网络节点,并配备了整流激活函数。输出层的5个节点分别为浪高、浪向、浪周期、流速和流向的回归。
[0027]
作为优选实施例,在使用深度回归网络进行海浪参数测量之前,需要用标定好的样本对深度回归网络进行训练,训练中,采用反向传播算法和随机梯度下降法进行训练。
[0028]
有益效果:本发明是针对海洋中的海浪参数测量,利用深度回归网络对浪高、浪周期、浪向、流速、流向进行估计。测波雷达系统首先通过数字采样对雷达回波中频信号进行数字化,并通过信号处理获得海杂波的雷达图像。利用海杂波雷达图像反演海浪参数信息。
附图说明
[0029]
图1为海浪的雷达回波示意图。
[0030]
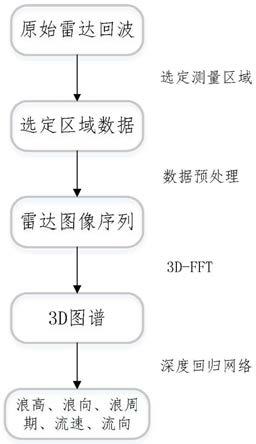
图2为雷达海浪测量算法流程框图。
[0031]
图3为海浪参数反演深度回归网络的网络结构框图。
[0032]
图4为选取区域极坐标雷达回波图像示意图。
[0033]
图5为经过线性插值后获得的笛卡尔坐标系雷达图像示意图。
具体实施方式
[0034]
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0035]
本发明基于深度回归网络的雷达海浪参数测量方法,包括以下步骤:
[0036]
(1)雷达通过天线发射射频调制脉冲信号,射频脉冲遇到目标物体后被反射,再经天线接收,通过环形器进入雷达接收通道,射频回波信号经限幅器限幅后,由射频前端低噪声放大、下变频为中频调制信号,雷达通过抗干扰、脉冲压缩等信号处理后获得海杂波回波图像数据;
[0037]
(2)对步骤(1)中雷达获得的海杂波回波进行选取,选取海杂波特征明显的区域进行海浪参数反演;
[0038]
(3)对步骤(2)选取的测量区域获得的海杂波数据进行抗干扰信号处理,去除同频异步干扰,结合目标检测去除舰船等目标回波,以及滤除云雨等气象杂波信号,并通过小波变换去除噪声;
[0039]
所述步骤(3)中的小波变换去除噪声的步骤如下:
[0040]
(a)对回波图像二维小波分解,并选择小波基进行三层分解;
[0041]
(b)对分解后高频系数进行阈值量化,选择合适的阈值;
[0042]
(c)重构经过量化处理的小波信号,获得去噪后的回波图像。
[0043]
(4)对经过步骤(3)处理的测量区域获得的海杂波数据进行坐标转换,采用技术将雷达获得的距离-角度极坐标系数据转换为直角坐标系数据;图4为选取区域极坐标雷达回波图像,图5为经过线性插值后获得的笛卡尔坐标系雷达图像。
[0044]
(5)对步骤(4)传递进来的在直角坐标系下的待反演数据,进行时-频转换,所述步骤(5)中利用三维傅里叶变换将其进行时-频转换:
[0045][0046]
将图像序列从时间和空间域转化到波数频率域,三维波数频率能量谱:
[0047][0048]
(6)将经过步骤(5)处理的三维谱数据输入训练好的深度回归网络获得浪高、浪向、浪周期、流速和流向信息,在使用进行计算之前需要利用浮标标定好的雷达三维谱数据对深度回归网络进行训练。
[0049]
在具体操作时,首先进行系统设计:
[0050]
测波雷达系统首先通过数字采样对雷达回波中频信号进行数字化,并通过信号处理获得海杂波的雷达图像。利用海杂波雷达图像反演海浪参数信息。图1为海浪的雷达回波示意图。
[0051]
雷达测浪算法流程:
[0052]
雷达海浪测量算法流程如图2所示,采用多次观测获得的海杂波图像序列进行处理。首先选取待测区域的海杂波数据,并对数据进行预处理,去除同频异步干扰、强目标干
扰以及云雨杂波干扰,并将雷达获得的极坐标数据转换为笛卡尔坐标数据。利用3维fft计算获得3维图像谱,并将其作为深度回归网络的输入,通过深度回归网络反演海浪参数信息。
[0053]
深度回归网络设计:
[0054]
深度回归网络由多个计算层组成,每个计算层都是输入到输出的转换。深度回归网络按网络结果的功能划分也可分为两部分:特征提取部分和线性回归部分。
[0055]
如图3所示,为海浪参数反演深度回归网络的网络结构。海浪参数反演深度回归网络由8个计算层组成,其中包括两个卷积层,两个整流层,两个池化层和两个全连接层组成。深度回归网络中的特征提取功能由卷积层,整流层和池化层完成。网络中的两个全连接层主要利用特征提取部分获得的特征信息完成海浪参数回归,反演海浪参数,即估计浪高、浪向、浪周期、流速和流向。深度回归网络的配置,包括如下步骤:
[0056]
(ⅰ)深度回归网络的输入是雷达回波数据经过3维fft后的3 维数据,该3维数据是待测区域坐标转换后的图像序列。数据大小与待测区域大小以及海浪观测积累次数决定;
[0057]
(ⅱ)第一层卷积层包含32个卷积核,每个卷积核的大小为5
×
5。第二层卷积层包含16个卷积核,每个卷积核大小为32
×3×
3;
[0058]
(ⅲ)两个池化层都采用的都是最大池化函数,池化滤波器的大小是3
×
3,池化层的步进是2;
[0059]
(ⅳ)第一层全连接层有30个网络节点,第二个全连接层作为整个深度回归网络的的输出层,拥有5个网络节点,并配备了整流激活函数。输出层的5个节点分别为浪高、浪向、浪周期、流速和流向的回归。
[0060]
在使用深度回归网络进行海浪参数测量之前,需要用标定好的样本对深度回归网络进行训练。训练中,采用反向传播算法和随机梯度下降法进行训练。
[0061]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1