一种光感模组及采用其的激光雷达的制作方法
1.本技术涉及光电感应测量技术领域,特别涉及一种光感模组及采用其的激光雷达。
背景技术:
2.随着生活场景的深度拓展,人工智能和电子科技的长足发展,人类对于图像信号的技术要求越来越高,传统的图像技术仅局限于二维表达,已经越来越满足不了人类更丰富的信息需求。渐渐地,光的深度信息测量能力被技术及产业界重视起来。
3.在均匀介质内,光的飞行速度为定值,该理论基础孕育了飞行时间(time of flight,tof)测量技术的发展。目前较为成熟的飞行时间测量技术包括dtof(direct time of flight),即直接飞行时间测量技术,以及itof(indirect time of flight)即间接飞行时间测量技术。直接飞行时间测量技术通过引入光脉冲的方式,利用特定波长的光脉冲对待测物体进行照射,并且对回波信号进行测量,得到飞行时间信号,再通过飞行时间信号和光飞行速度的不变性,就得到了物体的深度信息。飞行时间测量技术具有感测距离长、精度高,能耗低等优点被广泛应用于消费电子、无人驾驶、ar/vr等领域。
4.目前,直接飞行时间测量技术(dtof)主要运用到的传感器件为spad(单光子雪崩二极管)、由多个spad并联设置的sipm(硅光电倍增管)等。
5.具有spad的直接飞行时间测量系统向外发射具有固定波长的周期光脉冲信号,如940nm(纳米)光信号,周期光脉冲信号照射到物体上返回,通过滤波器,如滤光片等将环境中的其他波长光子滤除,入射到具有spad的传感器,spad就被认为受光子触发产生光感应信号。将该光感应信号输出到tdc(时间数字转换单元),时间数字转换单元通过计算光脉冲起点时间即start(开始)信号,和截止时间即stop(停止)信号之间时间差t,从而计算飞行距离:计算公式l=c*t/2。但由于物体反射回波信号的飞行时间有一定的波动变化以及环境光噪声的影响,dtof系统需要利用tcspc技术(时间相关单光子计数技术),重复发射和接收光信号n次,然后对捕捉到周期光脉冲信号的n’次飞行时间进行计数。该计数被附上像素地址后存储于存储单元中并进行累加,多次统计后做直方图,最后选取直方图中出现计数最高的飞行时间t用来计算待测物体的深度l,这称为完整的一帧测量。很显然,重复发射的激光脉冲次数n越多,单帧测量的时间就会越长,对应的帧率就会越低。但另一方面n值越大意味着采集到的信息也会越多,相应的测量信噪比以及距离精度也会提高。因此,如何在不降低帧率的情况下提高飞行时间感测的计数,提升dtof系统的感测效率是本发明要解决的问题。
技术实现要素:
6.有鉴于现有技术存在测量效率较低及容易引入误差的问题,本发明提供了一种光感模组及采用所述光感模组的激光雷达。
7.本发明提供的一种光感模组,包括多个光感单元组,所述多个光感单元组包括多
个光感单元,所述光感模组还包括时间数字转换模块和存储单元,所述光感单元用于接收周期光脉冲信号并触发产生光感信号,所述光感单元输出光感信号至所述时间数字转换模块,所述光感单元组被配置为,在一个光脉冲周期内,所述光感单元组可多次触发并输出多个光感信号,所述时间数字转换模块于将所述光感信号转换为时间信号,所述存储单元用于存储所述时间信号。
8.进一步的,所述存储单元根据光感单元组的坐标划分成多个存储子空间,所述存储子空间包括多个时间分箱,所述同一光感单元组产生的光感信号转化的时间信号存储在对应光感单元组坐标的存储子空间中的相应时间分箱内。
9.进一步的,所述光感模组配置为,在一个光脉冲周期内,所述光感单元组内的多个光感单元都可触发产生光感信号。
10.进一步的,所述光感单元在一个光脉冲周期内可多次触发产生光感信号。
11.进一步的,还包括分配电路,所述分配电路将所述光感单元输出的光感信号分配至所述时间数字转换模块。
12.进一步的,还包括光感单元组控制单元,所述光感单元组受光感单元组控制单元控制信号输出。
13.进一步的,还包括光感单元控制单元,所述光感单元受所述光感单元控制单元控制信号输出。
14.进一步的,所述时间数字转换模块包括多个时间数字转换单元,所述时间数字转换单元接收光感单元的光感信号并转换为时间信号。
15.进一步的,所述时间数字转换单元数量大于等于所述光感单元组数量且小于等于所述光感单元数量。
16.进一步的,还包括分配电路,所述分配电路将所述光感信号分配至所述时间数字转换单元,以使得光感信号尽可能都被转换成时间信号。
17.进一步的,所述时间数字转换模块包括至少一个粗测时间数字转换单元和多个细测时间数字转换单元,所述粗测数字转换单元与分配电路信号连接用于根据光感信号取得粗测时间信号,所述细测数字转换单元与分配电路信号连接用于根据光感信号取得细测时间信号。
18.进一步的,还包括分配电路,所述分配电路将所述光感信号分配至所述细测时间数字转换单元,以使得光感信号尽可能都被转换成时间信号。
19.进一步的,所述细测时间数字转换单元数量大于等于所述光感单元组数量且小于等于所述光感单元数量。
20.进一步的,所述光感单元包括光子感应元件和辅助电路,光子感应元件类型为spad。
21.进一步的,所述光感模组包括至少两种开口率的光感单元。
22.进一步的,所述各种开口率的光感单元均匀交错设置。
23.进一步的,所述相邻光感单元的开口率不同。
24.进一步的,还包括光调制单元,所述光调制单元设置于所述光感单元接收光脉冲的方向上,用于将光脉冲进行调制,避免光脉冲在一方向上过于集中。
25.进一步的,所述光调制单元为匀光片、光栅或微透镜中的其中一种或多种。
26.进一步的,所述至少部分光感单元组之间设置有光屏障,所述光屏障用于避免所述各光感单元组之间的光串扰。
27.本发明还提供了一种激光雷达,包括如上所述的光感模组,还包括光发射单元,所述光发射单元用于发射光脉冲,所述光感模组与光发射单元共同连接光感应控制单元,所述光感应控制单元用于控制所述光感模组与光发射单元形成光感应测量。
28.本发明还提供了一种便携终端,可用于运行应用软件,包括如上所述的激光雷达,所述光检测系统可为所述应用软件提供光感应信息。
29.本发明还提供了一种自主动作终端,包括计算决策系统和动作机构,还包括如上所述的激光雷达,所述激光雷达用于为自主动作终端的计算决策系统提供信息,所述激光雷达产生的信息可作为所述自主动作终端的动作决策基础之一而通过计算决策系统驱动动作机构动作。
30.本发明实施例提供的技术方案采用多个光感单元形成光感单元组,通过接收光脉冲感测深度信息,所述光感单元相应触发光感信号,在一个脉冲周期内,同一个光感单元组内的多个光感单元都可以感测光感信号,并且输出信号形成深度信息,该技术可以较大程度提高感测效率介绍误差。
31.本技术实施例的附加方面和优点将在下面的描述部分给出,部分将从下面的描述中变得明显,或通过本技术实施例的实践了解到。
附图说明
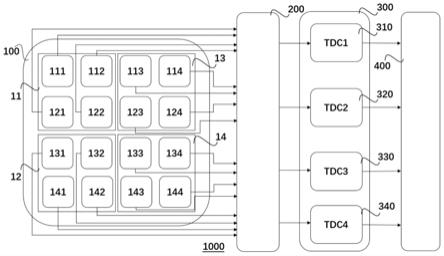
32.图1是本技术实施1例提供的光感模组俯视示意图
33.图2是本技术实施1例中的存储单元
34.图3是本技术实施例2提供的光感模组俯视示意图
35.图4是本技术实施例3提供的光感模组俯视示意图
36.图5是本技术实施例4提供的光感模组俯视示意图
37.图6是本技术实施例5提供的光感模组俯视示意图
38.图7是本技术实施例6提供的光感模组及激光雷达剖面示意图
39.图8是本技术实施例6提供的光感模组及激光雷达俯视示意图
40.图9是本技术实施例7便携终端示意图
41.图10是本技术实施例7便携终端感测光路示意图
42.图11是本技术实施例8激光雷达示意图
43.图12是本技术实施例9自主动作终端示意图
44.图13是本技术实施例10自主动作终端示意图
具体实施例
45.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。
46.下文的公开提供了许多不同的实施例用于实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设定进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。
47.实施例1:
48.如图1、2所示,本技术实施例提供了一种光感模组1000,用于感测环境目标物体的距离或深度信息,包括光感应阵列100,所述光感应阵列100由多个光感单元111-144构成。所述光感单元可采用spad(单光子雪崩二极管),用于感应特定频率的周期光脉冲信号并产生触发信号。所述光感模组1000还包括分配电路200、时间数字转换单元300和存储单元400,所述光感单元111-144用于接收周期光脉冲信号并触发产生光感信号,所述多个光感单元构成光感单元组11-14。所述光感单元组11-14通过读出电路读出。可以采用信号放大器、时间数字转换单元(time-to-digital converter,tdc)、模数转换器(analog-to-digital converter,adc)等器件中的一种或者多种组成的读出电路。本实施例采用所述分配电路200输出信号至所述时间数字转换单元300。
49.所述光感单元组被配置为,在一个光脉冲周期内,所述光感单元组可接收并输出多个光感信号。所述分配电路200可将所述光感信号分配输出至时间数字转换模块300,所述时间数字转换模块300用于将所述光感信号转换为时间信号,并储存在所述存储单元400内。其中,所述时间信号存储于所述存储单元400,后续处理器可读取所述存储单元400获得的时间信号,并通过时间信号计算飞行时间,再通过飞行时间计算飞行距离得到与目标物体的距离或深度信息。
50.可选的,所述光感单元为单光子雪崩二极管(single photo avalanche diode,spad)。
51.可选的,所述处理器例如但不限于应用处理器(application processor,ap)、中央处理器(cpu)、微控制器(mcu)等。所述存储单元、存储空间等存储模块包括但不限于闪存(flash memory)、带电可擦写可编程只读存储器(electrically erasable programmable read only memory,eeprom)、可编程只读存储器(programmable read only memory,prom)、以及硬盘等。
52.进一步的,所述光感单元包括光子感应元件和辅助电路,光子感应元件类型为spad。
53.具体的,所述光感信号是由光子进入spad传感器后,触发雪崩信号而产生的光电信号。所述光感信号可以是由雪崩信号产生的电压信号,该电压信号在整形并驱动增强后,输出的光电信号。
54.进一步的,所述存储单元400根据光感单元组的坐标划分成多个存储子空间,所述存储子空间包括多个时间分箱,所述同一光感单元组产生的光感信号存储在对应坐标的存储子空间中的相应时间分箱内,所述存储模式为累加。
55.为了在一个光脉冲周期内,将光感单元组配置为可以接收多个光子,有多种技术方案,包括但不限于以下几种:
56.光感单元组包括多个光感单元,在一个周期内只要有多个光子就有几率可以触发多个光感单元。同时,每个光感单元都分别连接分配电路,因此可达到在一个光脉冲周期内所述光感单元组可以多次触发并输出多个光感信号;
57.还有一种方式,提高光感单元组淬灭复位的速度,在一个光脉冲周期内可多次感应光子并输出光感信号。这种方式下,我们可以提高光感单元的性能来实现,如提高光感单元复位的速度。当然也可以通过增加加速淬灭复位的电路来实现,比如给所述光感单元增
加反向复位电压。
58.进一步的,数字转换模块300由数字转换单元310、320、330、340组成。通过采用这种多组数字转换单元的方式,可以提升光感信号转换为时间信号的速度和效率。
59.实施例2:
60.可选的,如图3所示,本技术实施例提供了一种光感模组1100,采用了分配电路210,该分配电路210为固定式分配电路。所述光感单元组111、112、121、122与数字转换模块31固定连接,其触发信号固定分配给数字转换单元310。所述光感单元113、114、123、124与数字转换单元31固定连接,其触发信号固定分配给数字转换单元320。同理,所述光感单元131、132、141、142与数字转换单元330固定连接,所述光感单元133、134、143、144与数字转换单元340固定连接。
61.实施例3:
62.可选的,如图4所示,本技术实施例提供了一种光感模组1200,所述分配电路220由四个四进四出锁存单元221-224构成。所述锁存单元将光感信号暂存,并根据数字转换模块的占用情况可选择地输出至空闲的数字转换单元,以进一步保证该光感信号更大概率被统计。
63.实施例4:
64.可选的,如图5所示,本技术实施例提供了一种光感模组1300,所述分配电路230采用四个选通电路231-234,当光感信号使得数字转换单元310导通并处于高电平状态,数字转换单元320处于工作状态可接收第二个光感信号,所述数字转换单元320变为高电平状态后,数字转换单元330可接收第三个光感信号,所述数字转换单元340依次类推。因此,所述分配电路配置为将所述光感信号依次分配至数字转换单元,从而充分利用空闲数字转换单元,避免光子同时触发光感单元时,光感信号无法同时输出至数字转换模块进行转换。
65.进一步的,所述光感单元组11-14包括至少两个光感单元,在一个光脉冲周期内,所述光感单元组内的多个光感单元111-144都可触发产生光感信号,所述光感信号通过分配电路分配至所述时间数字转换单元,所述时间数字转换单元将所述光感信号转换为时间信号,并累积储存在所述存储单元内。所述每个光感信号的时间信号与光子信号的坐标信息一同存储在所述存储单元中的相应通道内,每个相同时间信号和坐标信息被存储在相同的通道内,从而可形成一时间信号直方图。
66.进一步的,所述光感单元111-144在一个光脉冲周期内可多次触发产生光感信号,所述光感信号被分配电路分配至所述时间数字转换单元,并通过所述时间数字转换单元转换成时间信号,并累加储存在存储单元内。通过配置加速淬灭和重置电路,使得在一个光脉冲周期内,同一个光感单元可以多次触发光感信号,提高一个光脉冲周期内的信息采集速度。
67.进一步的,还包括光感单元组控制单元,所述光感单元组受光感单元组控制单元控制信号输出。通过设置光感单元组控制单元,可以控制光感单元组内多个光感单元是在一个光脉冲周期内多次触发接收和输出的模式,还是在一个光脉冲周期内只进行一次触发接收和输出。
68.同样的,为实现这样的控制,进一步的,还包括光感单元控制单元,所述光感单元受所述光子感应控制单元控制信号输出。
69.进一步的,还包括光感单元组控制单元,所述光感单元组受光感单元组控制单元控制信号输出。通过设置光感单元组控制单元,可以控制光感单元组内多个光感单元是在一个光脉冲周期内多次触发接收和输出的模式,还是在一个光脉冲周期内只进行一次触发接收和输出。控制单元可以配置为可使光感模组具有多种模式。第一种模式,在一个光脉冲周期内,让一个光感单元组内只有一个光感单元可被触发。第二种模式,在一个光脉冲周期内,让一个光感单元组内每个光感单元都有且仅有一次触发的机会,当其中一个光感单元被触发后,在同一个周期内,该光感单元就不可以再次触发。第三种模式,在一个光脉冲周期内,允许一个光感单元组内每个光感单元可多次触发。第四种模式,在一个光脉冲周期内,允许一个光感单元组内一部分光感单元仅可触发一次,一部分光感单元可触发多次。第五种模式,在一个光脉冲周期内,允许一个光感单元组内的多个或者全部光感单元可以按照一定顺序轮流触发。具体的,对每个光感单元设置可控开关。再具体的,可以设置相应电路使得光感单元为是否通电、是否工作、是否输出。
70.进一步的,所述时间数字转换单元与所述光感单元数量相同。在本发明实施例中通过采用相应的分配电路,比现有技术中采用每个光感单元直接连接一个数字转换单元的方式更节省电路规模和功耗。所以所述光感单元数量可配置为最高等于所述光感单元数量。
71.进一步的,为了使得电路规模达到最合适的配置,所述时间数字转换单元与所述光感单元组数量相同。
72.实施例5:
73.可选的,如图6所示,所述时间数字转换单元包括至少一个粗测时间数字转换单元350和多个细测时间数字转换单元311、321、331、341,所述粗测数字转换单元350与分配电路200信号连接,所述粗测数字转换单元350根据光感信号取得粗测时间信号,所述细测数字转换单元311、321、331、341与分配电路200信号连接用于根据光感信号取得细测时间信号。一个光感单元的光感信号分别取得粗测时间信号和细测时间信号,两种信号合并形成完整时间信号并存储在存储单元,以形成直方图。通过粗测时间数字转换单元和细测时间数字转换单元的组合,可以有效降低电路规模,并且在一个脉冲周期内可以获得更多的时间数字信号。
74.进一步的,所述细测时间数字转换单元与光感单元数量相同。当通过粗测时间数字转换单元和细测时间数字转换单元组合使用,减少电路规模,从而可以更多配置细测时间数字转换单元与光感单元配合,最高可以和光感单元的数量相同,保证每个信号的接收。所述粗测时间数字转换单元和细测时间数字转换单元可同步进行检测,最终将结果合并为终测时间信号。
75.进一步的,所述粗测时间数字转换单元可以为多个。
76.进一步的,所述粗测时间数字转换单元数量和光感应单元组数量相同。
77.进一步的,所述粗测时间数字转换单元数量和光感应单元组数量相同,每个粗测时间数字转换单元与一个光感应单元组对应连接。
78.进一步的,所述细测时间数字转换单元数量大于所述光感单元组数量且小于所述光感单元数量。为了提高在一个周期内接收光子的效率,可以将细测时间数字转换单元数量配置为大于光感单元组的数量,如为光感单元组数量的2倍及以上。
79.可选的,为了达到电路规模和测量精度的平衡,可以采用将所述细测时间数字转换单元配置为与光感单元组数量相同或者接近。
80.实施例6:
81.当环境光子数较多时,dtof器件实际测到的信号计数率会偏高,实际测到的直方图计数中的信号峰会前倾,使得测得物体的飞行时间比实际值偏小,这种效应称为雪崩堆积效应(pile up effect)。
82.注意到,雪崩堆积效应(pile up effect)会产生较大影响。
83.如图7、8所示,本实施例公开了一种光感模组,包括设置在基板20上的光感应单元组21、22、23、24,所述光感单元组21包括光感单元211、212、221、222,所述光感单元组22包括光感单元231、232、241、242,所述光子感应到单元组23包括光感单元213、214、223、224,所述光感单元组24包括光感单元组233、234、243、244。
84.所述光感单元组设置光调制单元,如光调制单元610、620。所述光调制单元设置于所述光感单元接收光脉冲的方向上,用于将光脉冲信号进行调制,如进行散射从而较为均匀地分配到每个光感应单元上,以避免光信号在一些方向上过于集中或者过于分散。即在每个光感应单元接收光信号之前,通过光调制单元的散射作用,将光脉冲散射,使得光感应单元组接收的光子均匀分摊到每个光感应单元上。还可以通过光调制单元将光脉冲调制成一些特定的均匀这样的设计使得高反物体或者近距离物体反射的大量光子不再局限于单个或者某几个光感应单元的接收,而是分摊到光感应单元组内所有光感应单元上,雪崩堆积效应效应减弱,最终使得各自的飞行时间计数保持正常,并且汇总到整个光感应单元组的飞行时间直方图计数正常。
85.优选的,所述光调制单元为匀光片、光栅或微透镜中的其中一种或多种。
86.其中,匀光片(homogenizer),也被称作工程扩散片(engineered diffuser)。匀光片表面不规则地紧密布满了结构不一的微透镜。当光束入射,每一小微透镜将照射其上的那部分光投射为能量分布均匀的光斑。而匀光片相当于对入射光束进行多次上述的匀光操作,并将所有的光斑进行叠加,最后形成均匀的出射光斑。
87.所述光调制单元还可以配置为将所述入射光进行集中处理,有效接收更大功率的光信号。
88.进一步的,所述至少部分光感单元组之间设置有光屏障,所述光屏障用于避免所述各光感单元组之间的光串扰。
89.更进一步的,在光感应单元之间设置有光屏障,所述光屏障可以阻挡光子在不同光感应单元之间进行串扰。
90.实施例7:
91.如图7、8所示,本技术实施例提供了一种激光雷达,所述激光雷达包括如上所述的光感模组120,还包括光发射单元710,所述光发射单元可发射光脉冲,所述光感模组与光发射单元共同连接光感应控制单元,所述光感应控制单元用于控制所述光感模组与光发射单元形成光感应测量。所述光发射单元可以采用垂直腔面发射激光器(vertical cavity surface emitting laser,简称vcsel,也可译为垂直共振腔面射型激光)、发光二极管(light emitting diode,led)、激光二极管(laser diode,ld)、法布里泊罗(fabry perot,fp)激光器、分布式反馈(distribute feedback,dfb)激光器以及电吸收调制激光器
(electro-absorption modulated,eml)等形式的光源。发射单元710上方还设置有出射光孔730。还包括检测光感应单元720,所述检测光感应单元720用于接收发射单元710起始发射光信号,从而确定每个光脉冲周期的起始时间。
92.具体的,所述激光雷达包括在基板20上设置有支撑结构630,通过支撑结构630固定透镜640,光感单元211、212、213、214等,以及光调制单元610、620。光感单元之间设置有光屏障500。所述光感单元构成光感单元组21、22、23、24,所述光感单元组之间通过光屏障510、520、530、540进行隔离,避免光串扰。
93.在一个光脉冲周期内,光子可以通过透镜640接收后,经由光调制单元610触发光感单元产生触发信号。并通过如实施例1至6之一的电路结构,将每个光子的触发信号都进行时间信号转换,并累加存储在存储单元的相应分箱内。从而在一个光脉冲周期或者相对短的几个光脉冲周期内就能实现目标物体的感测。相对于现有技术每个周期一个光感单元组只能输出一个光感信号的方案,本发明实施例的方案效率更高。实现了以空间换时间的感测效率。
94.另外,场景中可能存在的高反射物体或者在测量较近物体距离时,反射的环境光或者信号光强太大,可能导致像素接收产生pile-up效应以及pile-up效应增强。
95.那么进一步的,所述光感模组包括至少两种开口率的光感单元。目前主要的开口可选如下四种100%、50%、25%、5%。不同开口率的感应单元,可以有效对应不同距离的接收。在图8中,不同的大小的圆代表不同的开口率。
96.为了解决以上问题,进一步的,所述光感模组上相邻光感单元的开口率设置为不同种类的,避免了高反射问题的集中化。
97.那么进一步的,可以如图8所示将所述各种开口率的光感单元均匀交错设置,可以进一步使得光子不合理集中的问题被弱化。
98.同时,因本发明实施例也采用了在一个脉冲周期内,可以触发多个光子信号,那么小开口率的光感单元也可以充分采集到信息。
99.实施例8:
100.如图9、10所示,本技术再一实施例提供了一种便携终端2000,所述便携终端2000包括如上所述的激光雷达。所述激光雷达包括机体2100,以及设置在机体2100上的光感模组2320,和发射单元2310,所述激光雷达可以获取深度信息,所述便携终端2000可用于运行应用软件,所述光检测系统可为所述应用软件提供信息。
101.所述发射单元2310向目标发射特定波长的光脉冲,在碰到目标物体后形成反射回波,所述光感模组2320接收所述反射回波。在一个光脉冲周期内,光感模组可以接收大量反射回波,并可触发信号并转换为相应的时间信号存储在存储单元相应的时间分箱内,其中相同坐标的多个数据进行累加。通过以上方案,可以实现深度信息的快速采集,从而为便携终端提供高效的信息处理信号基础。
102.所述便携终端2000也可以为手机、手表、平板电脑等各种便携电子移动终端。
103.实施例9:
104.如图11所示,本发明公开了一种激光雷达,包括光感模组3200,发射单元3100,旋转机构3300,导光单元3400,所述光感模组3200用于接收光信号并触发感应信号,所述发射单元3100用于提供出射光脉冲,所述道光单元3400用于接收导出发射光及接收脉冲,旋转
机构3300用于驱动激光雷达旋转扫描空间。所述激光雷达采用以上实施例提供的光感模组。
105.实施例10:
106.如图12所示,所述自主动作终端可以例如自动驾驶汽车4000,采用上述技术方案的激光雷达4100、4200,采集外部环境中的三维深度信息即激光点云信息,将激光点云信息输出至计算决策系统,所述计算决策系统基于该信息通过机器学习等人工智能算法,做出物体类型及距离大小判断,然后根据决策机制控制汽车的方向盘、油门、刹车等动作机构,从而实现自动驾驶汽车的自主动作。在一个光脉冲周期内,光感模组可以接收大量反射回波,并可触发信号并转换为相应的时间信号存储在存储单元相应的时间分箱内,其中相同坐标的多个数据进行累加。通过以上方案,可以实现深度信息的快速采集,从而为自动驾驶汽车4000提供高效的信息处理信号基础。
107.实施例11:
108.如图13所示,所述自主动作终端可以例如机器人5000,包括上述技术方案的激光雷达5300,还包括设置在躯体5400上的机械手臂5100和机械双足5200。所述激光雷达5300用于采集外部环境中的三维深度信息,为机器人5000构建三维世界,机器人5000的计算决策系统利用该三维世界信息驱动机器人5000的动作机构机械手臂5100和机械双足5200完成相应的动作。在一个光脉冲周期内,光感模组可以接收大量反射回波,并可触发信号并转换为相应的时间信号存储在存储单元相应的时间分箱内,其中相同坐标的多个数据进行累加。通过以上方案,可以实现深度信息的快速采集,从而为机器人5000提供高效的信息处理信号基础。
109.以上所述,仅为本技术的具体实施例,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1