基于毫米波雷达的老人行为监测系统和方法与流程
1.本发明涉及毫米波雷达的老人行为监测技术领域,具体涉及基于毫米波雷达的老人行为监测系统和方法。
背景技术:
2.多普勒效应,指物体辐射的波长因为光源和观测者的相对运动而产生变化,在运动的波源前面,波被压缩,波长变得较短,频率变得较高,在运动的波源后面,产生相反的效应,波长变得较长,频率变得较低,波源的速度越高,所产生的效应越大。
3.我国每年约发生2500万起居家老人意外摔倒事件。摔倒最高发场景在凌晨3
‑
6点,床边(落床)占54%;其次在浴室、卫生间,占28%,而其他日常活动总和只占18%,卧室和卫生间、浴室是老人摔倒的最高危场所。
4.但是现有技术中通常是在老人的身上佩戴传感设备,传感设备检测老人的情况,此方法需要老人时刻佩戴传感设备,影响老人的正常生活;使用监控的方法监测时,受光线的影响,影响监控的连续性。
技术实现要素:
5.有鉴于此,本发明要解决的问题是提供基于毫米波雷达的老人行为监测系统和方法,能够不需要佩戴传感设备,还不受光线的影响,能够实时监控老人在室内的活动情况。
6.为解决上述技术问题,本发明采用的技术方案是:
7.基于毫米波雷达的老人行为监测系统和方法,步骤一:室内无人的情况下,连续接收若干组基准波,构建出室内的二维背景地图;
8.步骤二:连续接收检测波组,依据二维背景地图从检测波组中提取有效检测波组,有效检测波组为从目标物身上反射的毫米波,依据有效检测波组计算出人体的位置信息;
9.步骤三:自学习模块读取若干连续的位置信息,记录目标物在室内不同区域和检测盲区停留的时间,生成符合目标物的生活习惯的逻辑规则;
10.步骤四:判断老人活动轨迹且是否符合逻辑规则,依据判断结果确定是否向监护端发送报警信息。
11.进一步的,所述二维背景地图的获取包括有:连续向室内发出有指向性的毫米波,若干固定位置同时接收并保存,同时段的基准波生成基准波组;
12.基准波组内的波均进行快速傅里叶变换生成fft基准数据组,fft基准数据组进行dfft计算得出各次频率分量的幅值,通过降维map计算出最大幅值;
13.通过最大幅值计算出基准波组内每个波的反射方向,进而生成二维背景平面,多个二维背景平面做降维map计算生成二维背景地图。
14.进一步的,所述位置信息包括有老人的位置、速度和动作状态,进程一:检测波组经快速傅里叶变换生成fft检测数据组,fft检测数据组经过dfft计算得出检测波和相应分波的幅值,通过降维map计算得出检测波的最大幅值,进而计算出检测波在二维背景地图对
应位置;
15.进程二:通过二维背景地图对fft检测数据组做去背景处理,去除最大幅值不满足对应阀值的fft检测数据后生成fft有效数据组,获取fft有效数据内最大幅值对应的速度索引和距离索引;
16.进程三:通过最大幅值、速度索引和距离索引分别计算出反射点的方向、速度和距离,fft有效数据组在二维背景地图上的分布情况确定老人的动作状态。
17.进一步的,所述距离χ=距离索引
×
距离分辨率,距离分辨率c表示光速,b表示有效扫频带宽;
18.所述速度ν=(速度索引
–
dc分量值)
×
速度分辨率pν,dc分量值为载波速度,速度分辨率λ表示波长,t表示接收返回波的时长;
19.依据所述幅值索引对应返回波在不同接收点的复数值,复数值共轭相乘得到相位差;角度λ表示波长,ω表示相位差,l表示不同接收点的间距。
20.进一步的,包括有用于获取数据并反馈的雷达监控终端,所述雷达监控终端分别连接有用于判定人体动作情况的雷达单元、蜂窝通信单元、用于不同监测系统之间数据互通的局域网通信单元和用于给系统供电的供电单元;
21.所述蜂窝通信单元用于将雷达单元反监测数据和雷达监控终端的反馈上传至云服务器,所述云服务器用于二次判定老人动作情况并给出最终反馈到监护端。
22.进一步的,所述雷达监控终端包括有用于数据处理并给出反馈的u5处理芯片,所述u5处理芯片电连接有用于与蜂窝通信单元连接的u1通信接口、用于与雷达单元连接的u4通信接口和u6通信接口、用于与调制器连接的u2调制接口。
23.进一步的,所述雷达单元包括有获取毫米波数据的u2探测芯片,所述u2探测芯片输出端连接有用于判定人体动作情况的u4处理芯片,所述u4处理芯片连接有用于与u5处理芯片连接的j1通信接口。
24.进一步的,所述蜂窝通信单元包括有u4a通信芯片,所述u4a通信芯片连接有用于连接移动网络的u3芯片和用于数据传输的e1天线。
25.进一步的,所述局域网通信单元包括有u1通信芯片,所述u1通信芯片连接有用于数据传输的ant天线。
26.进一步的,所述供电单元包括有u3调压芯片,所述u3调压芯片输入端连接有j2通电串口。
27.本发明具有的优点和积极效果是:
28.(1)通过在室内固定位置安装监测系统,发出有指向性的毫米波,使用毫米波检测室内环境,生成二维背景地图,当二维背景地图范围内有老人移动时,返回波的波长和频率均发生改变,依据快速傅里叶变换将返回波转换成频域,并提取出包含速度、方向和距离的fft数据,依据fft数据计算出老人身上某一反射点距离、速度和方向,同时根据老人反射点在二维地图上的分布情况确定老人的动作。老人不需要佩戴传感设备,即可对老人的在室内的活动情况进行监测,且无需安装摄像头,监控过程不受光线的影响。
29.(2)监测系统通过记录老人在室内的活动轨迹,生成符合老人生活习惯的逻辑规则,判断老人的消失是否符合逻辑规则,即使老人移动到监测系统其监测区域的监控死角,也能够监控老人的摔倒情况。
附图说明
30.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
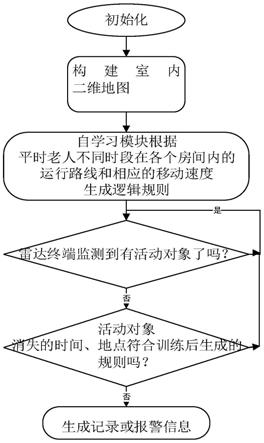
31.图1是本发明的基于毫米波雷达的老人行为监测系统和方法的整体流程图;
32.图2是本发明的基于毫米波雷达的老人行为监测系统其方法的判断过程;
33.图3是本发明的基于毫米波雷达的老人行为监测系统的系统图;
34.图4是本发明的基于毫米波雷达的老人行为监测系统的雷达监控终端电路图;
35.图5是本发明的基于毫米波雷达的老人行为监测系统的雷达单元电路图;
36.图6是本发明的基于毫米波雷达的老人行为监测系统的蜂窝通信单元部分电路图;
37.图7是本发明的基于毫米波雷达的老人行为监测系统的蜂窝通信单元部分电路图;
38.图8是本发明的基于毫米波雷达的老人行为监测系统的供电单元电路图;
39.图9是本发明的基于毫米波雷达的老人行为监测系统的局域网通信单元电路图;
40.图10是本发明的基于毫米波雷达的老人行为监测系统和方法中的一种实施例的布局示意图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
43.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
44.本发明提供基于毫米波雷达的老人行为监测系统和方法,如图1和图3所示,其系统包括有用于判断老人是否摔倒的雷达监控终端,雷达监控终端分别连接有用于确定老人动作情况的雷达单元、用于远距离无线传输的蜂窝通信单元、用于近距离数据互通的局域网通信单元和用于提供低压直流电的供电单元。
45.雷达单元包括有可以不断发出有指向性毫米波的发射天线,和接收反射后毫米波的接收天线。雷达单元根据接收的毫米波数据确定老人的动作情况,即老人所处位置、移动速度、动作情况等。优选的,接收天线的数量不少于一个设置,收天线平行且排列设置。以便获得同一个反射毫米波在不同接收天线上的相位差,进而计算出反射点所在的方向,以确定老人所在位置。
46.实用中,因为一个监测系统的检测范围有限,不同房间都需要放置一个监测系统。例如在客厅和卧室分别放置一个监控系统,用来分别确定老人在客厅或卧室的活动情况。局域网通信单元用于使客厅和卧室内的监测系统进行数据互通,便于获取老人从客厅的监控区域消失,到进入卧室的监控区域所花费的时间,便于确定老人的移动轨迹是否复合的逻辑规则。
47.雷达监控终端获取雷达单元和局域网通信单元的数据,依据获取的数据进行第一次逻辑运算。老人在监控区域内时,雷达监控终端判断老人的移动情况是否符合第一逻辑规则,确定老人的摔倒情况;老人不在监控区域内时,雷达监控终端读取老人从一个监控区域消失并进入另一个监控区域的间隔时间,若老人在超过设定时间没有进入另一个监控区域,判定老人摔倒。即使室内环境复杂,存在多处监控死角,监测系统依旧能够对老人的摔倒情况进行监控。
48.蜂窝通信单元用于远距离数据传输,将雷达监控终端给出的反馈、雷达单元检测数据和局域网通信单元数据一同上传到云服务器,云服务器不断记录老人的移动情况,并不断更新记录老人移动情况的第二逻辑规则。因为随着时间推移,人生活习惯会有所不同,云服务器内的逻辑规则会相应发生变化,例如老人家里增加了一个按摩椅,老人在按摩椅上停留的时间增加)。
49.云服务器依据获取的数据进行第二次逻辑运算,进一步判断老人是否摔倒,若依旧判定为老人摔倒,云服务器将警报信息发送到监护端(老人其家人或子女的手机上),监护端在联系第三方客服,第三方客服派送工作人员上门查看,确定老人是否安全。
50.具体方法如图2所示,监测系统的使用方法包括有步骤一:安装好监测系统后,开启监控系统,雷达单元不断的发出有指向性的毫米波,在房间内没有人的前提下,毫米波遇到房间内物品后反射,监测系统依据反射回来的毫米波构建室内的二维背景地图。
51.用于构建二维背景地图的返回波定义为基准波,以一组基准波的构建过程为例:发射天线连续的向没有人的室内发射毫米波,雷达单元接收并保存两个接收天线同时段内接收的反射波(通常截取载波的32个频率周期为一个时段),定义为基准波组。基准波组内的波均进行快速傅里叶变换生成fft基准数据组。
52.为方便对返回波进行处理,毫米波为中频iq信号(iq信号由载波信号和数据信号叠加构成)。快速傅里叶变换将基准波从时域转换成频域的fft基准数据,(fft基准数据由多个单一性能的波叠加构成,包括有载波、表示速度的速度波和表示距离的距离波)。
53.波同一段的峰值应相同,将fft基准数据组内的数据均进行dfft计算得出各fft基准数据其次频率分量的幅值。在使用降维map计算获得最大幅值(峰值)。通过最大幅值获得同一基准波在两个接收天线上的fft基准数据。计算出同一fft基准数据在不同接收天线上的相位差,进而计算出基准波反射点的方向,房间内所有反射点的方向位置共同构成一个二维背景平面。
54.房间内没有人时接收的多组基准波组,可生成多个二维背景平面,将多个二维背景平面依据降维map计算生成二维背景地图。二维背景地图内的每一个点对应用相应的方向、速度和距离。二维背景地图由多组二维背景平面叠加构成,二维背景地图上任意一点对应有多个fft基准数据,多个fft基准数的峰值形成一个范围区间,将基准fft数据的峰值的范围区间做为阀值(房间内固定点的反射方向和速度均不会改变,当有人经过时,该点的速度和距离改变,因此fft数据的峰值改变)。
55.步骤二:人进入房间后,两个接收天线继续接收并保存返回波,间隔固定时间段保存一组返回波(该组返回波命名为检测波),雷达单元依据不同时段的检测波,生成老人不同时段在室内的位置信息。位置信息包括有老人的位置、速度和动作状态。
56.进程一:检测波组通过快速傅里叶变换,生成fft检测数据组,fft检测数据组进行dfft计算得出各次频率分量的幅值(包括有速度波的幅值和距离波的幅值),在使用降维map计算获得fft检测数据的最大幅值(峰值),进而计算出单个检测波对应的方向,确定该检测波在二维背景地图上的位置。
57.进程二:将fft检测数据组做去背景处理生成fft有效数据组,峰值与对应方向的阀值区间对比,峰值在对应的阀值区间内,去除;检测fft数据的峰值不在对应阀区间围内,留下。fft检测数据组做去背景处理后并生成fft有效数据组(效数据组为从老人身上反射的毫米波数据)。获取fft有效数据组其峰值处的速度索引和距离索引。
58.进程三:通过峰值、速度索引和距离索引分别计算出反射点的方向、速度和距离。
59.距离χ=距离索引
×
距离分辨率,距离分辨率c表示光速,b表示距离波的有效扫频带宽。速度ν=(速度索引
–
dc分量值)
×
速度分辨率pν,dc分量值为载波速度,速度分辨率λ表示速度波的波长,t表示接收返回波的时长。
60.依据峰值对应检测波在不同接收点的复数值(接收点不同,会存在相位差),复数值共轭相乘得到相位差的值;通过相位差计算出反射点的角度值,角度λ表示波长,ω表示相位差,l表示不同接收点的间距。
61.进程四:有效检测波组对应在二维背景地图上,可反应老人在房间内的位置(方向和距离)、速度和动作状态,并生成老人在该时刻的位置信息。雷达单元连续的接收检测波,以获取老人在室内连续的移动情况,实现在室内进行实时监控的效果。同时还不会触犯老人的隐私(位置信息是以点集的方式上传到云服务器,不会具体表现处老人的外貌特征)。
62.步骤三:且雷达监控终端内的第一自学习模块读取老人若干连续的位置信息,生成符合老人生活习惯的逻辑规则。逻辑规则包括有老人的作息规律和动作习惯,老人一天内在客厅或卧室需要停留的时间范围,沙发上休息使用的动作形状,进入某一个密闭空间花费的时间范围(如厕所或浴室这类较为隐私的小型密闭空间)、移动的速度范围和从一个监控区间进入到另一个监控区间的时间等。
63.逻辑规则的生成需要记录老人每天的移动路径,记录结束的时间由监护端确定,雷达监控终端结束记录后,并依据记录的信息生成逻辑规则,在依据逻辑规则判断老人活动轨迹是否正常,降低出现误判断的概率,如:老人喜欢平躺在铺在地上的凉席上,或以较为奇怪的姿势躺在沙发上午休,若不提前记录习惯和姿势,容易将这类情况误判断成摔倒。
64.云服务器内设有第二自学习模块,监测者在智慧云服务器上选择与自家房形相同(相似)的房屋平面模型,并导入自学习模块内,第二自学习模块记录老人长时间的移动路径,绘制出老人的运行路线,运行路线包括有老人不同时段内在相应房间停留的时间,依据运行路线生成第二逻辑规则。雷达监控终端通过蜂窝通信单元将毫米波数据和雷达监控终端的反馈数据上传到云服务器,云服务器进行第二次逻辑运算,进一步判断老人是否摔倒。因为云服务器上导入了与老人房形相似的房屋模型,根据老人移动的速度计算出老人穿过监控盲区花费的时间,有效的降低误警报的概率。
65.如图3和图8所示,供电单元包括有u3调压芯片,u3调压芯片输入端连接有j2通电串口,j2通电串口与家用电路连接,u3调压芯片将家用的交流电转换成低压直流电源,以给监测系统整体供电。优选的,u3调压芯片可选用ams1117。如图3和图4所示。雷达监控终端包括有用于数据处理并给出反馈的u5处理芯片,优选的,型号可为pic18f26k80。
66.如图3和图5所示,雷达单元包括有获取毫米波数据的u2探测芯片,u2探测芯片外接毫米波传感器,以获取毫米波数据。u2探测芯片的型号可选用s3km111l。u2探测芯片的sda端口、scl端口、spi
‑
sclk端口、spi
‑
mosi0端口、spi
‑
csn端口和tspi
‑
io端口共同与u4处理芯片对应端口连接,将u2探测芯片获取的毫米波数据传输给u4处理芯片,u4处理芯片进行逻辑运算,确定老人的动作情况。即老人的动作形态,移动速度和所处位置。
67.u4处理芯片的o
‑
t1端口、o
‑
t2端口和rx端口连接有j1通信接口,j1通信接口用于与u5处理芯片连接,u4处理芯片将老人的动作情况传输给u5处理芯片,u5处理芯片依据老人的动作情况进行第一次逻辑运算,判断老人是否摔倒。u5处理芯片的t2x33端口和r2x33端口均连接有u4通信接口和u5通信接口,u4通信接口和u5通信接口均用于与雷达单元的j1通信接口连接,方便根据客户需求选择不同功能的雷达单元与u4处理芯片进行连接。
68.如图4所示,u5处理芯片的sdi端口、irq端口、sck端口、sdo端口、ce端口和csn端口共同连接u2调制接口,u2调制接口连接有调制器,调制器将u5处理芯片内的数字信号(如文件等)调制成可在无线传输的声音信号,便于数据的无线传输。
69.如图9所示,7u5处理芯片的irq端口、ce端口、csn端口和sck端口共同连接u1通信芯片,u1通信芯片的rfn端口连接有ant天线,ant天线用于与其他监测系统之间进行数据传输,便于确定老人从一个监测系统的监控区域到另一个监测系统的监控区域所花费的时间。
70.u5处理芯片的t1x33端口、r1x33端口、dtr端口和pen端口共同连接u1通信接口,如图6和图7所示,u1通信接口与蜂窝通信单元连接,蜂窝通信单元将u5处理芯片的反馈数据、雷达单元获取的毫米波数据和局域网通信单元之间的通信数据一同上传到云服务器,云服务器依据获取的数据进行第二次逻辑运算,进一步的确定老人的动作情况,提高结果的准确性。
71.u4a通信芯片连接有e1天线,e1天线用于数据传输。蜂窝通信单包括有u4a通信芯片,u4a通信芯片的usim
‑
clk端口、usim
‑
data端口、usim
‑
rst端口和usim
‑
vdd端口共同连接有u3通信芯片,u3通信芯片用于连接移动网络,移动网络通过信号基站将监测系统与云服务器连接,以便通过e1天线将数据上传到云服务器。
72.u4a通信芯片与u1通信接口之间连接有电平转换电路,u4a通信芯片的txd1.8端口和rxd1.8端口分别连接有电平转换电路的一端,电平转换电路的另一端与u1通信接口连
接。
73.本发明提供的一具体实施例如下:
74.毫米波对老人而言为无感检测,没有摄像头,不会给老人一种被监视的感觉。为方便监测系统的安装,将监测系统整体安装在日常频繁使用,但不需要移动的小电器内,如台灯、插板或灯泡等。老人容易健忘,容易忘记充电,台灯、插板或灯泡等家用电器直接与家用电路连通,不需要充电,方便给老人使用。
75.如图10所示的房间构成为例,用两个监测系统共同记录老人在客厅、卧室、阳台、厨房和卫生间的活动情况。客厅和卧室内安装监测系统,客厅的监测系统朝向厨房和卫生间放置。老人在客厅或卧室内活动时摔倒,雷达单元获取直接根据老人的动作情况,活动情况传输到雷达监控终端,雷达监控终端经过第一次逻辑运算判断老人摔倒,并将反馈和毫米波数据通过蜂窝通信单元上传到云服务器,云服务器依据毫米波数据进行第二次逻辑运算,依旧判定老人摔倒,云服务器将警报信息发送到监护端,监护端可与老人邻居联系或第三方人员联系,上门查看老人情况。
76.客厅内监测系统的检测区域与客厅形状像对应,老人在客厅活动时,雷达单元可接收到检测波,通过检测波确定老人在客厅的位置、动作状态和移动速度。老人离开客厅进入其他区域时,雷达单元无法接收到检测波,且最后接收到的检测波的位置在检测区域的边缘位置,记录并保存老人走出监控区域边缘时,动作状态和移动速度,并进行逻辑运算,判定老人是否在检测区域的边缘位置摔倒。
77.以如图10所示的房间布局为例,当老人从客厅其检测区域的下边缘中心位置消失,判定老人去了阳台;若老人到阳台并摔倒后,老人会长时间不回到客厅。雷达监控终端记录老人消失的位置和消失时间,判定老人的在阳台消失的时间不符合逻辑规律,将反馈上传到云服务器,云服务器发出警报信息。
78.当老人从客厅其检测区域下边缘的左侧消失,判定老人去了卧室。若老人在客厅和卧室交接处的监控盲区摔倒时,老人会长时间不进入到卧室。客厅的监测系统检测到老人从客厅的斜下方位置消失,将老人消失的位置、时间和消失时的速度,通过局域网通信单元传输给卧室内的监测系统,卧室监测系统依据消失时的速度计算出老人出现在卧室的时间,若老人在设定时间内没有进入卧室的监控区域;在依据逻辑规则判定,确定老人停留时间超出设定,判定老人摔倒,将老人摔倒的数据上传到云服务器。
79.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1