一种用于河道的远程水文监测系统
1.本发明涉及一种水文监测系统,尤其是一种用于河道的远程水文监测系统。
背景技术:
2.目前,在对现有的河道在进行水文监测时,尤其是对偏远地区河道进行远程水文监测时,如果采用人工定期进行巡查监测,不仅需要耗费大量的人力物力,而且测量的水文数据也不及时。若是在汛期,如果没有及时的水文数据,就不能及时掌握河道的水文信息,就不能对防汛工作进行快速反应和调度。
技术实现要素:
3.发明目的:提供一种用于河道的远程水文监测系统,能够对河道的水文数据进行实时监测,同时通过巡检无人机对河道进行水文图像采集,并远程发送至水文监控中心,无需进行人工定期进行巡查监测。
4.技术方案:本发明所述的用于河道的远程水文监测系统,包括巡检无人机以及各个水文监测基站;水文监测基站包括控制箱、升降充电平台、悬挑支撑架、悬吊拉绳、水质检测机构、雨量传感器以及水位传感器;在控制箱内设置有拉绳收放机构、基站控制器以及基站无线通信模块;
5.各个水文监测基站的悬挑支撑架沿河道分布式安装;升降充电平台安装在悬挑支撑架的顶部,并在升降充电平台上升降式安装有基站环形充电线圈;在巡检无人机上设置有摄像头和无人机环形充电线圈;无人机环形充电线圈用于与上升后的基站环形充电线圈配合为巡检无人机无线充电;在悬挑支撑架的悬吊端上安装有滑轮,控制箱安装在悬挑支撑架上;悬吊拉绳的一端安装在拉绳收放机构上,由拉绳收放机构对悬吊拉绳进行收放控制;悬吊拉绳的另一端通过滑轮转向后固定在水质检测机构上;雨量传感器以及水位传感器均安装在悬挑支撑架上;基站控制器分别与基站无线通信模块、雨量传感器以及水位传感器电连接,并对拉绳收放机构以及水质检测机构进行协调控制。
6.进一步的,水质检测机构包括浮力箱、一级弹簧线缆、二级弹簧线缆、接线圆筒、流速传感器以及各个水质传感器的传感探头;在浮力箱的中心处贯穿式设置有中心贯穿孔;在接线圆筒的下端面中心处竖向设置有悬吊杆,流速传感器安装在悬吊杆上;在浮力箱上竖向安装有l形杆,二级弹簧线缆的上端固定在l形杆的上端上,二级弹簧线缆的下端贯穿中心贯穿孔后固定在接线圆筒上;各个水质传感器的传感探头径向固定安装在接线圆筒上,且流速传感器以及各个传感探头分别与二级弹簧线缆下端的对应线芯电连接;一级弹簧线缆的上端固定安装在悬挑支撑架的悬吊端上,一级弹簧线缆的下端固定在浮力箱上,且一级弹簧线缆下端的各个线芯与二级弹簧线缆上端的各个线芯通过连接线缆电连接;悬吊拉绳的端部贯穿中心贯穿孔后固定安装在接线圆筒的上端面中心处;在控制箱内设置有与基站控制器电连接的各个水质传感器的信号处理电路;基站控制器以及各个水质传感器的信号处理电路分别与一级弹簧线缆上端的对应线芯电连接。
7.进一步的,在悬吊杆的下端上固定安装有重锤;在浮力箱的上侧面上安装有水面指示灯,且水面指示灯与一级弹簧线缆下端的对应线芯电连接;接线圆筒的上端设置为锥形凸台;在中心贯穿孔的孔壁上竖向设置有四个贯穿槽,且四个贯穿槽成十字形分布,用于在接线圆筒进入中心贯穿孔后嵌入各个传感探头;在四个贯穿槽的槽壁上分布设置有用于清理各个传感探头的清理刷毛;在浮力箱的下侧面上,且位于各个相邻贯穿槽之间均设置有一个挤压块;在各个挤压块上均设置有两个分别延伸至相邻两个贯穿槽的斜坡面;在接线圆筒的上端圆周壁上旋转式安装有两个挤压滚轮,用于与斜坡面相挤压,使得各个传感探头进入对应的贯穿槽内;在接线圆筒的下端圆周上设置有限位圆盘,且限位圆盘的直径大于中心贯穿孔的孔径。
8.进一步的,拉绳收放机构包括收卷绞盘、升降驱动电机、升降驱动蜗杆以及升降驱动蜗轮;收卷绞盘旋转式安装在控制箱内,升降驱动蜗轮固定安装在收卷绞盘的中心转轴上;悬吊拉绳的端部绕设固定在收卷绞盘上;升降驱动电机固定安装在控制箱内,升降驱动蜗杆对接安装在升降驱动电机的输出轴端部上;升降驱动蜗杆与升降驱动蜗轮相啮合;在控制箱内设置有与基站控制器电连接的升降驱动电路,升降驱动电路与升降驱动电机电连接。
9.进一步的,悬挑支撑架包括管状立柱、底部支撑管、支撑底板以及悬挑横杆;底部支撑管竖向固定安装在支撑底板上;管状立柱的下端旋转式安装在底部支撑管的上端管口内;在管状立柱的下端固定安装有旋转驱动蜗轮;在底部支撑管的上端通过蜗杆支座旋转式安装有一根与旋转驱动蜗轮相啮合的旋转驱动蜗杆;在旋转驱动蜗杆的端部上设置有三角形凹槽;悬挑横杆垂直固定安装在管状立柱上;控制箱固定安装在管状立柱上;升降充电平台安装在管状立柱的顶端上;雨量传感器安装在悬挑横杆悬挑端的上部,水位传感器安装在悬挑横杆悬挑端的下部。
10.进一步的,巡检无人机包括飞行单元、四根缓冲弹簧、四根竖向支撑杆以及摄像云台;四根竖向支撑杆竖向固定安装在飞行单元的下侧面上,无人机环形充电线圈的边缘通过四个固定侧耳活动式在四根竖向支撑杆上;在四根竖向支撑杆的中部均设置有一个阻挡凸圈;四根缓冲弹簧分别套设在四根竖向支撑杆上,用于弹性推动固定侧耳按压在阻挡凸圈上;在四根竖向支撑杆的下端部上均设置有一个滚珠支座,并在滚珠支座的下侧面上旋转式安装有支撑滚珠;摄像云台固定安装在飞行单元的下侧面中心处,摄像头安装在摄像云台上,且摄像头由无人机环形充电线圈的中心环孔向下伸出;飞行单元分别与无人机环形充电线圈、摄像云台以及摄像头电连接。
11.进一步的,升降充电平台包括中部支撑平台、设备安装箱、折叠支撑套、四根斜撑杆、折叠驱动螺杆、折叠驱动电机以及弹性升降机构;设备安装箱固定安装在悬挑支撑架的顶端上,中部支撑平台固定安装在设备安装箱的顶部上;在中部支撑平台的中心处设置有升降窗口,且升降窗口与设备安装箱的顶部相连通;弹性升降机构安装在设备安装箱内,基站环形充电线圈安装在弹性升降机构上,用于在巡检无人机停靠就位后将基站环形充电线圈弹出;折叠驱动电机安装在设备安装箱内,折叠驱动螺杆的上端与折叠驱动电机的输出轴相对接安装;在中部支撑平台的四侧边缘上均铰接安装有一块支撑背板;折叠支撑套滑动式套设在竖向支架上,四根斜撑杆的下端通过四个下铰接座分别摆动式铰接安装在折叠支撑套上,四根斜撑杆的上端分别摆动式铰接安装在四块支撑背板的下侧面上;在折叠驱
动螺杆上螺纹旋合安装有折叠驱动座,且折叠驱动座与折叠支撑套固定连接;在控制箱内设置有无线充电电路以及与基站控制器电连接的折叠驱动电路;折叠驱动电路与折叠驱动电机电连接;基站蓄电池通过无线充电电路与基站环形充电线圈电连接。
12.进一步的,在支撑背板上安装有太阳能电池板;在控制箱内设置有太阳能充电电路以及基站蓄电池;四块太阳能电池板通过太阳能充电电路为基站蓄电池充电;在四块支撑背板的上侧面上均垂直设置有一根推压杆;在四根推压杆的上端均摆动式铰接安装有一根推压连杆;在推压连杆的另一端上铰接安装有一个弧形推压座,且弧形推压座滑动式放置于中部支撑平台上;在弧形推压座的弧形面上设置有用于推动巡检无人机向中部支撑平台中部的柔性支撑垫。
13.进一步的,弹性升降机构包括u形升降板、支撑弹簧、两根解锁套管、两根回收拉杆以及两个弹簧锁定单元;基站环形充电线圈水平固定安装在u形升降板的两个竖向侧板上边缘上;支撑弹簧弹性支撑在u形升降板的水平侧板与设备安装箱的内底面之间;两根解锁套管的下端分别竖向固定安装在两个下铰接座上,两根回收拉杆的下端分别活动式插入两根解锁套管的上端管口上;在两根解锁套管的管壁上均竖向设置有活动限位条形孔,在两根回收拉杆的插入端上均设置有伸入对应活动限位条形孔内的活动限位块;两根回收拉杆的上端均贯穿设备安装箱的底部,并固定在u形升降板的水平侧板的下侧面上;在设备安装箱的竖向内侧面上设置有两个锁扣孔,两个弹簧锁定单元均安装在u形升降板上,用于在u形升降板下降进入设备安装箱内时分别对两个锁扣孔进行卡扣锁定;在两根解锁套管的上端上升并按压在u形升降板上时,推动两个弹簧锁定单元进行解锁;在基站环形充电线圈与无人机环形充电线圈相贴近时,活动限位块滑移至活动限位条形孔的上端。
14.进一步的,弹簧锁定单元包括锁杆、锁定弹簧以及锁壳;锁壳固定安装在u形升降板的水平侧板上,并在锁壳上设置有伸缩孔;锁定弹簧安装在伸缩孔内;锁杆的一端插装在伸缩孔内,且按压在锁定弹簧上;锁杆的另一端设置为半球形端头,用于插入锁扣孔进行卡扣锁定;在u形升降板的水平侧板上侧面上设置有对位指示灯,且对位指示灯位于基站环形充电线圈的中心环孔下方;基站控制器与对位指示灯电连接。
15.本发明与现有技术相比,其有益效果是:利用各个水文监测基站能够对河道进行定点水文监测,并通过基站无线通信模块远程发送至远程监控中心,从而实现远程水文数据无人采集;利用巡检无人机能够对河道进行巡检,并通过摄像头对河道水文状况进行图像采集,从而上传至远程监控中心,便于对河道进行无盲点监测;利用无人机环形充电线圈与基站环形充电线圈的配合,能够对巡检无人机进行无线充电,使得巡检无人机能够在充电电池电压不足时及时补充电能,满足巡检无人机长期无人监管下的可靠运行;利用悬吊拉绳与拉绳收放机构的配合,能够对水质检测机构的悬吊高度进行调节,从而满足不同深度的水质检测需要,还能够在无需水质监测完成后,将水质检测机构悬空吊起,避免长时间停留被缠绕上水草;利用升降充电平台来升降式安装基站环形充电线圈,从而在巡检无人机停靠就位后才将基站环形充电线圈弹出,避免提前弹出后对巡检无人机的位置调节造成阻挡;利用雨量传感器以及水位传感器能够分别实现雨量和水位进行监测。
附图说明
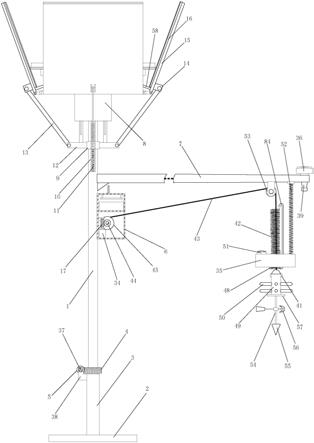
16.图1为本发明的巡检无人机与水文监测基站结构示意图;
17.图2为本发明的巡检无人机结构示意图;
18.图3为本发明的浮力箱的底部结构示意图;
19.图4为本发明的浮力箱的局部剖视结构示意图;
20.图5为本发明的升降驱动机构折叠状态下的局部剖视结构示意图;
21.图6为本发明的升降驱动机构展开状态下的局部剖视结构示意图;
22.图7为本发明的水文监测基站电路结构示意图;
23.图8为本发明的巡检无人机电路结构示意图。
具体实施方式
24.下面结合附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
25.实施例1:
26.如图1-8所示,本发明公开的用于河道的远程水文监测系统包括:巡检无人机以及各个水文监测基站;水文监测基站包括控制箱6、升降充电平台、悬挑支撑架、悬吊拉绳43、水质检测机构、雨量传感器36以及水位传感器39;在控制箱6内设置有拉绳收放机构、基站控制器以及基站无线通信模块;
27.各个水文监测基站的悬挑支撑架沿河道分布式安装;升降充电平台安装在悬挑支撑架的顶部,并在升降充电平台上升降式安装有基站环形充电线圈62;在巡检无人机上设置有摄像头31和无人机环形充电线圈26;无人机环形充电线圈26用于与上升后的基站环形充电线圈62配合为巡检无人机无线充电;在悬挑支撑架的悬吊端上安装有滑轮53,控制箱6安装在悬挑支撑架上;悬吊拉绳43的一端安装在拉绳收放机构上,由拉绳收放机构对悬吊拉绳43进行收放控制;悬吊拉绳43的另一端通过滑轮53转向后固定在水质检测机构上;雨量传感器36以及水位传感器39均安装在悬挑支撑架上;基站控制器分别与基站无线通信模块、雨量传感器36以及水位传感器39电连接,并对拉绳收放机构以及水质检测机构进行协调控制。
28.在控制箱6内还设置有基站存储器以及基站蓄电池;站蓄电池分别为基站控制器、基站存储器、基站无线通信模块、雨量传感器36、水位传感器39、悬挑驱动支架以及水质检测机构供电。
29.利用各个水文监测基站能够对河道进行定点水文监测,并通过基站无线通信模块远程发送至远程监控中心,从而实现远程水文数据无人采集;利用巡检无人机能够对河道进行巡检,并通过摄像头31对河道水文状况进行图像采集,从而上传至远程监控中心,便于对河道进行无盲点监测;利用无人机环形充电线圈26与基站环形充电线圈62的配合,能够对巡检无人机进行无线充电,使得巡检无人机能够在充电电池电压不足时及时补充电能,满足巡检无人机长期无人监管下的可靠运行;利用悬吊拉绳43与拉绳收放机构的配合,能够对水质检测机构的悬吊高度进行调节,从而满足不同深度的水质检测需要,还能够在无需水质监测完成后,将水质检测机构悬空吊起,避免长时间停留被缠绕上水草;利用升降充电平台来升降式安装基站环形充电线圈62,从而在巡检无人机停靠就位后才将基站环形充电线圈62弹出,避免提前弹出后对巡检无人机的位置调节造成阻挡;利用雨量传感器36以及水位传感器39能够分别实现雨量和水位进行监测。
30.进一步的,水质检测机构包括浮力箱35、一级弹簧线缆52、二级弹簧线缆42、接线圆筒49、流速传感器56以及各个水质传感器的传感探头50;在浮力箱35的中心处贯穿式设置有中心贯穿孔46;在接线圆筒49的下端面中心处竖向设置有悬吊杆54,流速传感器56安装在悬吊杆54上;在浮力箱35上竖向安装有l形杆84,二级弹簧线缆42的上端固定在l形杆84的上端上,二级弹簧线缆42的下端贯穿中心贯穿孔46后固定在接线圆筒49上;各个水质传感器的传感探头50径向固定安装在接线圆筒49上,且流速传感器56以及各个传感探头50分别与二级弹簧线缆42下端的对应线芯电连接;一级弹簧线缆52的上端固定安装在悬挑支撑架的悬吊端上,一级弹簧线缆52的下端固定在浮力箱35上,且一级弹簧线缆52下端的各个线芯与二级弹簧线缆42上端的各个线芯通过连接线缆电连接;悬吊拉绳43的端部贯穿中心贯穿孔46后固定安装在接线圆筒49的上端面中心处;在控制箱6内设置有与基站控制器电连接的各个水质传感器的信号处理电路;基站控制器以及各个水质传感器的信号处理电路分别与一级弹簧线缆52上端的对应线芯电连接。
31.利用一级弹簧线缆52能够在浮力箱35升降过程中进行电连接;利用二级弹簧线缆42能够在浮力箱35浮于水面上时,实现各个升降运动的传感探头50的电连接,从而满足不同深度处的水质检测需要;利用流速传感器56能够对检测点处的流速进行检测;利用接线圆筒49安装各个传感探头50,从而方便各个传感探头50的接线。
32.进一步的,在悬吊杆54的下端上固定安装有重锤55;在浮力箱35的上侧面上安装有水面指示灯51,且水面指示灯51与一级弹簧线缆52下端的对应线芯电连接;接线圆筒49的上端设置为锥形凸台71;在中心贯穿孔46的孔壁上竖向设置有四个贯穿槽82,且四个贯穿槽82成十字形分布,用于在接线圆筒49进入中心贯穿孔46后嵌入各个传感探头50;在四个贯穿槽82的槽壁上分布设置有用于清理各个传感探头50的清理刷毛73;在浮力箱35的下侧面上,且位于各个相邻贯穿槽82之间均设置有一个挤压块47;在各个挤压块47上均设置有两个分别延伸至相邻两个贯穿槽82的斜坡面48;在接线圆筒49的上端圆周壁上旋转式安装有两个挤压滚轮41,用于与斜坡面48相挤压,使得各个传感探头50进入对应的贯穿槽82内;在接线圆筒49的下端圆周上设置有限位圆盘57,且限位圆盘57的直径大于中心贯穿孔46的孔径。
33.利用水面指示灯51能够闪烁指示,从而便于河道内的船只或其他航行器进行避让;利用重锤55能够降低水质检测机构入水后的摆动,增强水质检测的稳定性;利用挤压滚轮41与斜坡面48的配合,能够对接线圆筒49进行旋转对位,从而使得各个传感探头50能够准确进入对应的贯穿槽82内;利用贯穿槽82内的清理刷毛73能够在各个传感探头50进出贯穿槽82时进行清理,确保传感探头50的检测精度和可靠性;利用浮力箱35能够提供一定的浮力作用,使得水质检测机构在进入水面时,使得传感探头50相对贯穿槽82向下移动,从而利用清理刷毛73对传感探头50上附着的杂质进行清理,此外在水质检测机构脱离水面时,在重力作用下使得传感探头50相对贯穿槽82向上移动,同样能够利用清理刷毛73对传感探头50上附着的杂质进行清理;利用锥形凸台71能够便于接线圆筒49上端与中心贯穿孔46相对位;利用限位圆盘57能够在一直向上提拉接线圆筒49时带动浮力箱35一起脱离水面。
34.进一步的,拉绳收放机构包括收卷绞盘45、升降驱动电机34、升降驱动蜗杆17以及升降驱动蜗轮44;收卷绞盘45旋转式安装在控制箱6内,升降驱动蜗轮44固定安装在收卷绞盘45的中心转轴上;悬吊拉绳43的端部绕设固定在收卷绞盘45上;升降驱动电机34固定安
装在控制箱6内,升降驱动蜗杆17对接安装在升降驱动电机34的输出轴端部上;升降驱动蜗杆17与升降驱动蜗轮44相啮合;在控制箱6内设置有与基站控制器电连接的升降驱动电路,升降驱动电路与升降驱动电机34电连接。
35.利用升降驱动电机34、升降驱动蜗杆17以及升降驱动蜗轮44能够对收卷绞盘45进行旋转驱动和定位,从而满足悬吊拉绳43的收放要求。
36.进一步的,悬挑支撑架包括管状立柱1、底部支撑管3、支撑底板2以及悬挑横杆7;底部支撑管3竖向固定安装在支撑底板2上;管状立柱1的下端旋转式安装在底部支撑管3的上端管口内;在管状立柱1的下端固定安装有旋转驱动蜗轮4;在底部支撑管3的上端通过蜗杆支座38旋转式安装有一根与旋转驱动蜗轮4相啮合的旋转驱动蜗杆5;在旋转驱动蜗杆5的端部上设置有三角形凹槽37;悬挑横杆7垂直固定安装在管状立柱1上;控制箱6固定安装在管状立柱1上;升降充电平台安装在管状立柱1的顶端上;雨量传感器36安装在悬挑横杆7悬挑端的上部,水位传感器39安装在悬挑横杆7悬挑端的下部。
37.利用旋转驱动蜗轮4与旋转驱动蜗杆5的配合,能够对管状立柱1进行旋转和定位,从而方便维护时将悬挑横杆7向岸边摆动,使得维护人员对水质检测机构进行维护;利用三角形凹槽37能够便于通过对应的工具进行旋转驱动蜗杆5的旋转驱动。
38.进一步的,巡检无人机包括飞行单元、四根缓冲弹簧21、四根竖向支撑杆22以及摄像云台;四根竖向支撑杆22竖向固定安装在飞行单元的下侧面上,无人机环形充电线圈26的边缘通过四个固定侧耳25活动式在四根竖向支撑杆22上;在四根竖向支撑杆22的中部均设置有一个阻挡凸圈40;四根缓冲弹簧21分别套设在四根竖向支撑杆22上,用于弹性推动固定侧耳25按压在阻挡凸圈40上;在四根竖向支撑杆22的下端部上均设置有一个滚珠支座23,并在滚珠支座23的下侧面上旋转式安装有支撑滚珠24;摄像云台固定安装在飞行单元的下侧面中心处,摄像头31安装在摄像云台上,且摄像头31由无人机环形充电线圈26的中心环孔向下伸出;飞行单元分别与无人机环形充电线圈26、摄像云台以及摄像头31电连接。
39.利用四根缓冲弹簧21能够对无人机环形充电线圈26进行弹性下压,从而能够在与基站环形充电线圈62上升相贴近时,避免对巡检无人机造成强烈冲击而发生位移;利用支撑滚珠24能够在巡检无人机降落后,方便推移巡检无人机至中部支撑平台61的中部。
40.进一步的,飞行单元包括机壳18以及四个旋翼电机20;在机壳18边缘水平安装有四根旋翼撑杆19,且四根旋翼撑杆19呈十字形分布;四个旋翼电机20分别固定安装在四根旋翼撑杆19的悬空端部上。
41.进一步的,摄像云台包括旋转驱动电机28、上侧u形支架27、下侧u形支架29以及俯仰驱动电机32;上侧u形支架27固定安装在机壳18的下侧面中心处,旋转驱动电机28安装在上侧u形支架27内,下侧u形支架29固定安装在旋转驱动电机28的输出轴端部上;摄像头31通过旋转调节轴旋转式安装在下侧u形支架29的两块侧板之间,并在旋转调节轴上固定安装有旋转从动齿轮30;俯仰驱动电机32固定安装在下侧u形支架29内,并在输出轴上固定安装有与旋转从动齿轮30相啮合的旋转主动齿轮33。
42.进一步的,在机壳18内设置有飞行控制器、巡航存储器、陀螺仪、定位模块、电压采集电路、远程无线通信模块、从蓝牙模块、飞行驱动电路、旋转驱动电路、俯仰驱动电路以及充电电池;飞行控制器分别与巡航存储器、陀螺仪、定位模块、电压采集电路、远程无线通信模块、从蓝牙模块、飞行驱动电路、摄像头31、旋转驱动电路以及俯仰驱动电路电连接,飞行
驱动电路与四个旋翼电机20电连接,旋转驱动电路与旋转驱动电机28电连接,俯仰驱动电路与俯仰驱动电机32电连接;无人机环形充电线圈26通过无线充电电路与充电电池电连接;电压采集电路与充电电池的供电端电连接;充电电池分别为飞行控制器、巡航存储器、摄像头31、陀螺仪、定位模块、远程无线通信模块、从蓝牙模块、飞行驱动电路、旋转驱动电路以及俯仰驱动电路供电;在控制箱6内设置有与基站控制器电连接的主蓝牙模块,用于与从蓝牙模块配对通信。
43.利用旋转驱动电机28以及俯仰驱动电机32构成的摄像云台,能够对摄像头31进行的朝向进行调节;利用电压采集电路能够实时采集充电电池的电压,从而在电压不足时即使找到最近的水文监测基站进行停靠和充电;利用从蓝牙模块与主蓝牙模块的配合,能够实现巡检无人机与水文监测基站进行近距离通信。
44.进一步的,升降充电平台包括中部支撑平台61、设备安装箱8、折叠支撑套9、四根斜撑杆13、折叠驱动螺杆11、折叠驱动电机67以及弹性升降机构;设备安装箱8固定安装在悬挑支撑架的顶端上,中部支撑平台61固定安装在设备安装箱8的顶部上;在中部支撑平台61的中心处设置有升降窗口75,且升降窗口75与设备安装箱8的顶部相连通;弹性升降机构安装在设备安装箱8内,基站环形充电线圈62安装在弹性升降机构上,用于在巡检无人机停靠就位后将基站环形充电线圈62弹出;折叠驱动电机67安装在设备安装箱8内,折叠驱动螺杆11的上端与折叠驱动电机67的输出轴相对接安装;在中部支撑平台61的四侧边缘上均铰接安装有一块支撑背板15;折叠支撑套9滑动式套设在竖向支架上,四根斜撑杆13的下端通过四个下铰接座12分别摆动式铰接安装在折叠支撑套9上,四根斜撑杆13的上端通过四个上铰接座14分别摆动式铰接安装在四块支撑背板15的下侧面上;在折叠驱动螺杆11上螺纹旋合安装有折叠驱动座;在管状立柱1上竖向设置有连通条形孔10;折叠驱动座通过连接柱贯穿连通条形孔10后与折叠支撑套9固定连接;在控制箱6内设置有无线充电电路以及与基站控制器电连接的折叠驱动电路;折叠驱动电路与折叠驱动电机67电连接;基站蓄电池通过无线充电电路与基站环形充电线圈62电连接。
45.利用中部支撑平台61能够便于停靠巡检无人机,并通过基站环形充电线圈62与无人机环形充电线圈26配合实现巡检无人机的无线充电;利用折叠驱动螺杆11、折叠驱动座、支撑滑套9以及四根斜撑杆13能够对四块支撑背板15进行折叠驱动形成漏斗状,从而在巡检无人机下降停靠时增强下降停靠的准确性,此外在巡检无人机充电时,通过四块支撑背板15能够对巡检无人机四周进行围挡限位,避免大风天气将巡检无人机吹移偏离充电位置;利用弹性升降机构对基站环形充电线圈62进行弹性升降控制,从而在巡检无人机停靠就位后将基站环形充电线圈62弹出,避免提前弹出后对巡检无人机的位置调节造成阻挡。
46.进一步的,在支撑背板15上安装有太阳能电池板16;在控制箱6内设置有太阳能充电电路以及基站蓄电池;四块太阳能电池板16通过太阳能充电电路为基站蓄电池充电;在四块支撑背板15的上侧面上均垂直设置有一根推压杆58;在四根推压杆58的上端均摆动式铰接安装有一根推压连杆59;在推压连杆59的另一端上铰接安装有一个弧形推压座60,且弧形推压座60滑动式放置于中部支撑平台61上;在弧形推压座60的弧形面上设置有用于推动巡检无人机向中部支撑平台61中部的柔性支撑垫68。
47.利用四块太阳能电池板16能够对基站蓄电池进行太阳能充电,确保水文监测基站长期可靠运行;利用推压杆58、推压连杆59、弧形推压座60以及柔性支撑垫68构成的侧边推
动机构,从而在四块支撑背板15向上折叠时从四个方向推动巡检无人机向中部支撑平台61中部,使得基站环形充电线圈62与无人机环形充电线圈26对准充电;利用柔性支撑垫68能够防止推动过程中对巡检无人机造成损坏。
48.进一步的,弹性升降机构包括u形升降板64、支撑弹簧72、两根解锁套管66、两根回收拉杆70以及两个弹簧锁定单元;基站环形充电线圈62水平固定安装在u形升降板64的两个竖向侧板上边缘上;支撑弹簧72弹性支撑在u形升降板64的水平侧板与设备安装箱8的内底面之间;两根解锁套管66的下端分别竖向固定安装在两个下铰接座12上,两根回收拉杆70的下端分别活动式插入两根解锁套管66的上端管口上;在两根解锁套管66的管壁上均竖向设置有活动限位条形孔63,在两根回收拉杆70的插入端上均设置有伸入对应活动限位条形孔63内的活动限位块65;两根回收拉杆70的上端均贯穿设备安装箱8的底部,并固定在u形升降板64的水平侧板的下侧面上;在设备安装箱8的竖向内侧面上设置有两个锁扣孔77,两个弹簧锁定单元均安装在u形升降板64上,用于在u形升降板64下降进入设备安装箱8内时分别对两个锁扣孔77进行卡扣锁定;在两根解锁套管66的上端上升并按压在u形升降板64上时,推动两个弹簧锁定单元进行解锁;在基站环形充电线圈62与无人机环形充电线圈26相贴近时,活动限位块65滑移至活动限位条形孔63的上端。
49.利用活动限位条形孔63与活动限位块65的配合能够在折叠支撑套9向下移动时拉动u形升降板64向下移动,从而使得基站环形充电线圈62收回到升降窗口内,不影响下次巡检无人机降落充电;利用两个弹簧锁定单元能够对下降至一定位置的u形升降板64进行锁定;利用两根解锁套管66能够在折叠支撑套9上升至最高位时对u形升降板64进行推动,从而使得u形升降板64向上弹起,使得基站环形充电线圈62与无人机环形充电线圈26贴近对准充电,而在巡检无人机向中部推动过程中,解锁套管66还未按压到u形升降板64上,基站环形充电线圈62不会弹出,避免了提前弹出后对巡检无人机的位置调节造成阻挡;利用支撑弹簧72能够在u形升降板64解锁后,推动基站环形充电线圈62弹出与无人机环形充电线圈26相贴近。
50.进一步的,弹簧锁定单元包括锁杆78、锁定弹簧以及锁壳69;锁壳69固定安装在u形升降板64的水平侧板上,并在锁壳69上设置有伸缩孔;锁定弹簧安装在伸缩孔内;锁杆78的一端插装在伸缩孔内,且按压在锁定弹簧上;锁杆78的另一端设置为半球形端头,用于插入锁扣孔77进行卡扣锁定;在u形升降板64的水平侧板上侧面上设置有对位指示灯74,且对位指示灯74位于基站环形充电线圈62的中心环孔下方;基站控制器与对位指示灯74电连接。
51.利用半球形端头能够在下方解锁套管66推动时,从而方便从锁扣孔77中挤压推出;利用对位指示灯74能够在摄像头31进行图像采集对位时增强对位精度,且能够在夜晚也能够进行精确定位,从而准确降落在中部支撑平台61的中部。
52.本发明公开的用于河道的远程水文监测系统中:基站控制器、飞行控制器均采用现有的单片机控制器,用于对应实现各个电路的协调控制;基站存储器、巡航存储器均采用现有的存储电路模块,用于对应存储相关数据;雨量传感器36采用现有的雨量传感器,用于对基站位置进行雨量监测;水位传感器39采用现有的超声波水位传感器,用于对河道的水位进行实时监测;水质传感器包括现有的多类水质传感器,例如余氯传感器、toc传感器、电导率传感器、氨氮传感器、ph传感器、orp传感器、浊度传感器、水温传感器、盐度传感器、溶
解氧传感器中的2-6种;流速传感器56采用现有的流速传感器,用于实现河道内水流监测;基站无线通信模块和远程无线通信模块均采用现有的4g通信模块或者5g通信模块,用于实现远程数据传输;主蓝牙模块和从蓝牙模块均采用现有的蓝牙通信模块,用于实现基站控制器与行控制器的蓝牙配对连接;定位模块采用现有的gps定位模块或者北斗定位模块,用于实现巡检无人机的定位和导航;摄像头31采用现有的红外摄像头,用于实现水面环境图像采集;陀螺仪采用现有的陀螺仪,用于实现巡检无人机的方向判断和导航;对位指示灯74采用现有的红色闪烁指示灯,水面指示灯51采用现有的蓝色闪烁指示灯;电控开关采用现有的电子开关电路,例如三极管构成的开关电路;电压采集电路采用现有的分压电路,再由飞行控制器的a/d采集端口进行数字式采集,从而获取充电电池的电压数据;折叠驱动电路、升降驱动电路、飞行驱动电路、旋转驱动电路以及俯仰驱动电路均采用现有的电机驱动电路,用于分别对折叠驱动电机67、升降驱动电机34、旋翼电机20、旋转驱动电机28以及俯仰驱动电机32进行驱动控制。
53.本发明提供的河道水文自动化监测系统在工作时,包括如下步骤:
54.基站监测步骤:首先将各个水文监测基站沿河道间隔设置,根据现场安装现有调节悬挑横杆7的悬挑方向,再设定各个传感器的初始参数;由基站控制器定期控制升降驱动电机34,将水质检测机构放入河道的水流中,进行不同深度的水质检测,并在检测完成后将水质检测机构再吊起离开水面,避免水草缠绕;在检测过程中,水面指示灯51闪烁指示,从而提醒河道内的船只或其他航行器进行避让;
55.清理步骤:在水质检测机构进入水面时,由浮力箱35在浮力作用下浮于水面,而接线圆筒49在重力作用下继续下移,从而由贯穿槽82内的清理刷毛73对传感探头50进行清扫,清理掉传感探头50上附着的杂质,确保传感探头50的检测精度和可靠性;在水质检测机构上升脱离水面时,浮力箱35在重力作用下停留水面,而接线圆筒49在悬吊拉力作用下先上移,使得贯穿槽82内的清理刷毛73对传感探头50进行清扫;
56.无人机巡检步骤:无人机根据预先存储在巡航存储器中的河道位置数据对河道进行巡检,由摄像头31对河道图像进行沿线采集,获取河道的水势情况、堤坝情况、浮萍情况、水草情况、漂浮物情况以及船只情况图像,并通过远程无线通信模块发送至远程监控中心,同时远程监控中心还能通过远程无线通信模块向巡检无人机发送摄像头转向控制命令,由摄像云台对摄像头31的朝向进行调节,从而满足远程临时拍摄需要;
57.无人机充电步骤:在飞行控制器通过电压采集电路采集到充电电池电压低于设定的阈值时,则由飞行控制器根据各个水文监测基站的位置数据选择一个靠近的水文监测基站进行充电,在巡检无人机飞行靠近对应的水文监测基站时,由摄像头31采集图像,并根据对位指示灯74找准中部支撑平台61中部的基站环形充电线圈62后,悬停于基站环形充电线圈62的上方,再控制巡检无人机下降停放在中部支撑平台61上;再由主蓝牙模块和从蓝牙模块配对通信,此时由基站控制器控制折叠驱动电机67,使得四块支撑背板15向上翻转,通过四块支撑背板15对巡检无人机向中部进行推动,同时通过四个柔性支撑垫68对四个滚珠支座23进行推动,并在无人机环形充电线圈26位于基站环形充电线圈62正上方时,两根解锁套管66的上端刚好推动u形升降板64上移,使得半球形端头在推压作用下脱离锁扣孔77实现解锁,使得无人机环形充电线圈26与基站环形充电线圈62相贴近,实现充电电池的无线充电,同时在无线充电过程中,四块支撑背板15能够对四周进行围挡限位,避免大风天气
将巡检无人机吹移偏离充电位置;在充电完成后,巡检无人机继续进行巡检,再由折叠驱动电机67驱动使得四块支撑背板15展开,同时解锁套管66通过回收拉杆70拉动u形升降板64下降,并在进入设备安装箱8后,由锁定弹簧推动锁杆78插入锁扣孔77进行卡扣锁定。
58.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1