一种基于多无人机的大深度UXO探测系统及探测方法与流程
一种基于多无人机的大深度uxo探测系统及探测方法
技术领域
1.本发明属于地球物理瞬变电磁探测技术领域,具体涉及利用多台无人机提高载重,控制大发射线圈的飞行姿态来达到大深度的uxo探测。
背景技术:
2.未爆弹(uxo)是一种在战争期间及其其他军事活动期间,布设和投放的地雷、炸弹等遗留武器,由于军事活动结束后,随着时间的推移,地形地貌发生了变化,导致先前布置的未爆弹的位置发生了偏差。这不仅时时刻刻威胁着人类的生命安全,限制人类的正常活动空间,还降低了土地资源的利用率,限制当地社会与经济发展。地球物理方法作为一种强有力的勘探方法,一直以来在未爆弹的勘探中有着非常重要的地位。
3.地球物理方法在勘探领域占据着非常重要的地位,尤其在探测uxo方面。由于uxo与背景的电阻率差异,磁法勘探和电法勘探是使用非常广泛的两类方法。
4.其中,磁法勘探是一种被动源勘探手段,异常信号相较电法勘探更弱。当探测区域内存在较强的磁性杂质时,磁法勘探的勘探效果不理想,甚至可能有效信号被干扰信号所覆盖,另外,在复杂的地磁环境下,其探测的虚警率将大大提高。
5.瞬变电磁法探测效率高,对低阻的uxo识别能力强。而传统的方法,采用单台无人机探测,在载重上,往往只能搭载小线圈的发射框,而小线圈探测面临着诸多困难,其探测信号较弱,信噪比相对较低,所探测的深度也较浅,此外,在三维正演中,小线圈的情况也较难计算,难以建立相应的数据库来解决uxo问题。
6.针对现有技术的不足,本发明在瞬变电磁法的基础上,提出了一种基于多无人机的大深度uxo探测系统及探测方法,该系统将现有技术中采用单台无人机搭载小发射线框改进为用多台无人机搭载大发射线框,以此来提高探测深度。此外,通过多台无人机控制发射线框的角度,减少了角度纠正的麻烦。最后,值得注意的是,通过一系列的三维正演计算,我们可以得到,控制发射线框的角度能提高uxo在横向上的分辨率。该方法能够很好地解决uxo的探测深度与探测精度的问题,提供了一种新型的uxo探测思路。
技术实现要素:
7.为解决现有技术存在的不足,本发明改进了无人机瞬变电磁法对uxo的探测方式,技术方案如下。
8.一种基于多无人机的大深度uxo探测系统,其特征在于,该探测系统通过多台无人机搭载发射线框,发射线框的各个角点分别与多个无人机连接,从而将总的载重提高了数倍,从而可以搭载大发射线框,提高探测深度和探测信号的信噪比;
9.进一步地,所述大发射线框为3m
×
3m的矩形发射线框;
10.进一步地,所述大发射线框内侧活动连接有接收线框;
11.进一步地,所述接收线框质心处通过连接装置吊装在所述大发射线框中心处,所述接收线框,角点处设置有配重,从而能够在所述大发射线框改变角度时保持水平;
12.基于上述探测系统的探测方法,通过控制无人机的高度,控制发射线框姿态进行倾斜变化,所述倾斜变化是指线框平面的法线在垂直于水平面的平面内转动,调节接收线圈使其保持水平,然后对uxo进行探测,从而实现了在大线圈的情况下具有较好的横向分辨率。最后根据瞬变电磁系统的姿态变化影响,倾斜变化分为几何效应影响和感应效应影响,一般背景场能够通过下面的式子1来进行姿态纠正。
13.ratio=0.5sinβ1sinβ2+cosβ1cosβ2ꢀꢀ
(1)
14.式中,等号右边前一项为感应效应影响,后一项为几何效应影响,ratio是纠正因子,将实测的数据直接除以ratio就是纠正后的响应。β1为发射线框平面相对于水平面的夹角,β2为接受线框平面相对于水平面的夹角,由于该装置的接收线圈保持水平姿态,所以β2=0。
15.本发明的有益效果:
16.(1)探测深度大、信噪比高:单台无人机往往由于载重有限,通常采取的是小线圈发射,该方法一般探测深度小,并且异常信号相对较弱,容易被噪音覆盖,而采用多无人机则可以提高载重从而实现大线圈的信号发射,提高了探测深度和信噪比;
17.(2)易于建立数据库:从三维正演的角度来说,小线圈对于网格的要求比较严格,网格数量相对较大,这将大大地增加了三维正演的难度和耗时,而数据库的建立需要大量的三维正演计算作为支撑,所以用多无人机实现大线圈的发射,将大大地降低了数据库建立的难度和耗时;
18.(3)探测精度高,横向分辨率高:从姿态纠正来说,单台无人机一般采用的是悬挂式装置,这种方式容易受外界影响,会出现线圈的摆动、倾斜和偏航等姿态变化,如果这种影响不加以纠正将会给结果带来误差。而多无人机由于固定了线圈的各个角点,能够很好地控制线框的姿态。此外,通过三维正演发现,通过控制发射线框的姿态,能够突出uxo的中心点位置,大大提高了横向分辨率。
附图说明
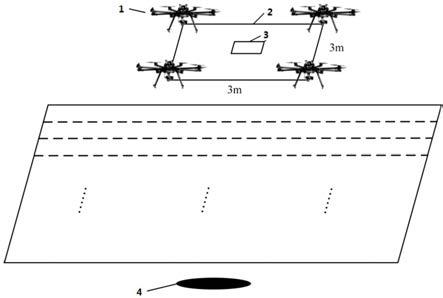
19.图1是本发明探测系统示意图;
20.图2是本发明探测系统倾斜发射线框示意图;
21.图3是发射线框不同倾斜角度下的正演响应图;
22.图中,1-无人机,2-大发射线框,3-接收线框,4-uxo
具体实施方式
23.下面结合附图对本发明进行详细说明,为方便说明,实施例选用四台无人机搭载矩形大发射线框,其他数量无人机和大发射线框形式也在本发明的保护范围内。
24.本发明公开了一种基于瞬变电磁法的多无人机实现大深度uxo探测方法和技术,该方法基于电磁感应原理,将大发射线框2的各个角点固定在多台无人机1上,通过控制大发射线框2两边的无人机高度来控制发射线框的倾斜角度,之后,发射时间域阶跃波信号,利用成熟的瞬变电磁法接收机,实现探测地下uxo4的目的。
25.一般而言,单台无人机所能载重的是小线圈,而小线圈由于其半径,发射有效面积小,故发射信号的总能量小,这就将导致两个方面的问题,一是探测深度浅,当uxo4埋深较
深时,其有效信号的信噪比较低,此时,探测的误差率将大大提高,且由于发射能量小,所以相比大线圈,有效信号相对较弱,容易被周围的环境干扰,抗噪能力差。本发明利用多无人机实现了大深度的uxo探测,解决了有效探测深度浅与发射能力小的问题。但线圈尺寸增大的时,往往又会造成探测方法在横向的分辨率低的问题,为了解决该问题,本发明又在该基础上提出了倾斜姿态探测,即通过控制大发射线框2两边的无人机高度来控制其倾斜角度来进行uxo探测,通过无人机高度改变大发射线框2与水平面的夹角,倾斜过程中,大发射线框2平面的法线始终在垂直于水平面的平面中运动,改变根据姿态纠正的理论,对于背景场的倾斜姿态纠正,可以根据以下公式1来进行:
26.ratio=0.5sinβ1sinβ2+cosβ1cosβ2ꢀꢀ
(1)
27.式中,等号右边前一项为感应效应影响,后一项为几何效应影响,ratio是纠正因子,将实测的数据直接除以ratio就是纠正后的响应。β1为大发射线框2平面相对于水平面的夹角,β2为接受线框3平面相对于水平面的夹角,由于该装置的接受线框3保持水平姿态,β2=0,所以,式子可以进一步简写为公示2:
28.ratio=cosβ1ꢀꢀ
(2)
29.将所探测的垂直磁场分量信号经过上面的倾斜姿态纠正后,由于uxo是低阻,背景是高阻,而低阻在几何纠正下,会相对于背景有放大的效果,故导致异常更加明显,相对的有效信号也就更强。此外,根据图3的示意图可以看出,倾斜角度越增大时,其uxo的异常越明显,在测线上的梯度变化也越明显,测量工作者可以简单的根据多测道图来划分uxo在横向上精确位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1