一种鸣笛监测系统定位误差检测系统及方法
1.本发明涉及声学测量领域,特别涉及一种鸣笛监测系统定位误差检测系统及方法。
背景技术:
2.随着城市经济的飞速发展,机动车数量迅猛增加,噪声污染日益严重,其中机动车鸣笛噪声占据了主要部分。交警部门过去常采取巡逻等方式加以监管,但人工执法效率低、可靠性不高,因此各大城市如今纷纷引入鸣笛监测系统对违法鸣笛现象作自动化检测,该系统可对机动车鸣笛进行声源识别、定位和记录。鸣笛监测系统源于声学照相机,能够把看不见的声音信号转换成看得见的图像信息,最后以声相云图的方式将鸣笛声与鸣笛车辆相对应。
3.鸣笛监测系统作为一种应用越来越广泛的交通执法工具,其抓拍结果的可靠性受到广泛的关注。定位准确性是鸣笛监测系统的首要技术指标,该指标的合格与否是评价系统能否正常使用的基础。尤其是投入使用的鸣笛监测系统处于风吹日晒雨淋的环境中,在一定的工作时限后,需要验证其有效识别区域内的抓拍准确性。因此,实时对鸣笛监测系统进行现场检测具有重要意义。经过大量、多方面调研得知各大生产厂家对鸣笛监测系统产品参数定义不尽相同,国内外也没有统一的计量方法和校准装置来衡量鸣笛监测系统的技术指标和精度。本发明通过对鸣笛监测系统的定位误差、有效识别区域进行研究,为该系统重要参数的现场检测提供参考。
技术实现要素:
4.为了解决上述问题,本发明提供了一种鸣笛监测系统定位误差检测系统及方法,通过这个系统和方法可以科学高效地对鸣笛监测系统现场工作时的定位误差进行检测,输出动态定位误差曲线,实现对鸣笛监测系统的动态定位误差和有效识别区域的检测。
5.为了实现上述目的,本发明采用以下技术方案来实现:
6.本发明系统主要包括标准声源、智能摄像头、激光测距仪、智能小车、信号发生装置和计算机。鸣笛监测系统安装于室外道路的支撑杆上,对一定范围内的鸣笛声进行抓拍定位,并将定位结果保存到计算机;智能小车上安装了标准声源、智能摄像头和激光测距仪,智能摄像头通过深度学习的目标识别算法实时捕捉鸣笛监测系统,使得鸣笛监测系统始终位于摄像头视野的中心位置,记录摄像头在水平和竖直方向的偏转角度;激光测距仪测量标准声源到鸣笛监测系统的直线距离,获得鸣笛监测系统与声源的空间位置关系;信号发生装置控制标准声源发出2-5khz范围内的特定频率信号;智能小车在运动过程中一方面采集计算鸣笛监测系统与标准声源的空间位置信息,另一方面所搭载的标准声源持续性发声触发鸣笛监测系统定位抓拍,将同一时刻的鸣笛监测系统定位信息与检测系统测距的位置作比较,输出鸣笛监测系统的动态定位误差曲线。结合每条车道中测出的鸣笛监测系统的动态定位误差曲线,以一定的定位误差值为界限,检测鸣笛监测系统的有效识别区域。
7.本发明的有益效果在于:
8.1.通过深度学习的目标检测算法,在智能摄像头的视野中识别出鸣笛监测系统,并智能摄像头自动调整角度,使得鸣笛监测系统始终位于智能摄像头的视野中心位置,记录此时智能摄像头转动的角度,同时控制激光测距模块测量两者的直线距离,计算两者之间的相对坐标,代替了人工对声源实际位置的测量,减小了测量误差。
9.2.本方法在测量过程中,计算机无线控制智能小车对鸣笛监测系统做远-近-远的相对运动,通过摄像头跟踪系统和激光测距系统,可以对鸣笛监测系统进行不停车定位,输出不同频率下的动态定位误差曲线,以更加直观的形式展示鸣笛监测系统在一定范围内的定位误差。
10.3.目前国内外没有统一的计量方法和检测系统来衡量鸣笛监测系统的有效识别区域,该方法对鸣笛监测系统进行实时动态定位误差计算,以一定的定位误差值为界限,检测鸣笛监测系统的有效识别区域,该思路为计量部门制定检定规程、研究校准系统提供了技术思路。
附图说明
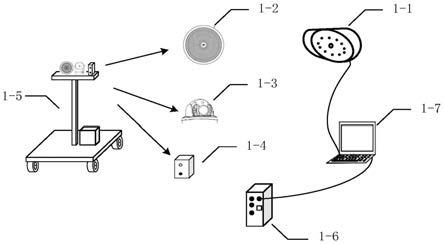
11.图1为本发明定位误差检测系统的装置示意图;
12.图2为本发明定位误差检测系统的系统结构图;
13.图3为本发明方法的实施路径图。
具体实施方式
14.下面结合本发明的具体实施方式和附图对本发明的校准方法作进一步描述,从而本发明的有益效果将进一步明确。
15.如图1所示鸣笛监测系统定位误差检测系统装置主要包括鸣笛监测系统1—1、标准声源1—2、智能摄像头1—3、激光测距仪1—4、智能小车1—5、信号发生装置1—6和计算机1—7。鸣笛监测系统1—1安装于室外6m高的支撑杆上;标准声源1—2的工作频率为2-5khz,用于触发鸣笛监测系统1—1工作;智能摄像头1—3用于跟踪捕捉鸣笛监测系统,为激光测距仪1—4确定合适的测距角度;激光测距仪1—4测量标准声源到鸣笛监测系统之间的距离,以获取两者之间的空间位置关系;智能小车1—5由计算机1—7远程控制运动状态,并作为声源和测量系统的载体,实时控制标准声源1—2的运动轨迹;信号发生装置1—6与计算机1—7相连,给以标准声源1—2特定频率的信号激励,驱动其发声。计算机1—7通过处理鸣笛监测系统1—1获得的定位信息和智能小车上检测系统的测量结果,绘制动态定位误差曲线。
16.如图2所示定位误差检测系统的系统结构图。分为四个部分:标准声源系统、摄像头跟踪系统、激光测距系统、分析计算系统。标准声源系统发出声音信号,触发鸣笛监测系统对标准声源进行识别定位;摄像头跟踪系统包含深度学习算法,获取运动过程中标准声源与鸣笛监测系统的相对角度关系;激光测距系统在角度关系已知的基础上,按实时的方向位置打出激光测量标准声源与鸣笛监测系统的直线距离;分析计算系统通过角度和距离数据建立标准声源与鸣笛监测系统的空间位置关系,与鸣笛监测系统传输到计算机的声源定位信息比较计算出动态定位误差曲线;控制器协调关联各个系统模块之间的数据传输。
17.如图3所示为本发明方法对鸣笛监测系统的实施路径图。在室外道路上,以某条车道为例,使搭载检测系统的智能小车在距离鸣笛监测系统的最远处开始运动,慢慢接近鸣笛监测系统后又做相对运动回到原点,以时间为同步量,以声源频率、两者距离为自变量,输出鸣笛监测系统对应的动态定位误差曲线,并对每条车道逐一进行检测。
18.本发明涉及一种鸣笛监测系统定位误差检测方法,包括以下步骤:
19.步骤一:在进行检测工作前,拍摄适量不同角度、不同距离情况下的包含鸣笛监测系统的图片,采用labelimg软件进行人工标注制作成数据集,用于训练识别鸣笛监测系统的目标检测网络,训练好的网络模型能够在视频中识别跟踪鸣笛监测系统。
20.步骤二:绘制动态定位误差曲线。计算机通过信号发生装置驱动标准声源发出特定频率的声信号,无线连接并控制智能小车对鸣笛监测系统做远-近-远的相对运动,运动过程中标准声源持续发声,连续触发鸣笛监测系统抓拍定位,将定位数据保存到计算机。智能小车上的摄像头跟踪系统和激光测距系统用于获取标准声源相对鸣笛监测系统的方位角和距离,通过分析计算两者之间的空间位置关系获得智能小车的实际位置,最后对比鸣笛监测系统抓拍的定位坐标和检测系统计算得到的实际位置获得随距离变化的动态定位误差曲线。
21.步骤三:检测鸣笛监测系统有效识别区域。以某条车道为例,使搭载检测系统的智能小车在距离鸣笛监测系统的最远处开始运动,慢慢接近鸣笛监测系统后又做相对运动回到原点,对鸣笛监测系统进行实时动态定位误差曲线绘制,以一定的定位误差值为界限,检测鸣笛监测系统的有效识别区域。
22.综上所述,本发明对鸣笛监测系统的动态定位误差和有效识别区域提供了检测方法及系统,搭建了鸣笛监测系统的定位误差现场检测系统,主要包括标准声源、智能摄像头、激光测距仪、智能小车、信号发生装置和计算机。通过实地模拟机动车在运动过程中鸣笛,绘制鸣笛监测系统抓拍的动态定位误差曲线,检测鸣笛监测系统的有效识别区域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1