一种基于毫米波雷达的有无人检测方法与流程
1.本发明涉及毫米波雷达应用技术,具体涉及一种基于毫米波雷达的有无人检测方法。
背景技术:
2.以往用于室内人员监测的的监测装置主要包括被动红外传感器、光学摄像头等;但这些装置容易受到外界环境的干扰,导致监测的效果不好,另外,采用摄像头监测也不利于用户的隐私保护。
3.毫米波雷达用作生命感知是近两年新兴的技术,由于毫米波雷达相较于其他监测装置具有更大的覆盖范围、良好的环境适用性、更高的准确性和稳定性,因此在诸如汽车驾驶室、会议室、家庭卧室、客厅、特定保密场所等场景中具有十分广泛的应用前景。
4.然而,在这些应用场景中当人员静止不动时,毫米波雷达几乎不会产生点云,也就无法根据点的信息来判断场景中是否有人。
技术实现要素:
5.本发明所要解决的技术问题是:提出一种基于毫米波雷达的有无人检测方法,能较为方便且较为准确的判断室内是否有人,提高检测效果。
6.本发明解决上述技术问题采用的技术方案是:
7.一种基于毫米波雷达的有无人检测方法,包括以下步骤:
8.s1、毫米波雷达对待监测空间发射电磁波信号,收集回波信号并进行信号处理,对处理后的数据进行静态杂波消除处理;
9.s2、对静态杂波消除处理后的数据进行反正切计算获得相位信息,再对相位进行展开和去趋势操作;同时,对静态杂波消除处理后的数据进行信号处理获得点云数据,根据多帧是否持续有点云数判断出所检测场景是否有人存在,获得第一初步判定结果;
10.s3、对相位进行展开和去趋势操作后的数据进行低通滤波处理,获得低频数据;
11.s4、对滤波后的低频数据进行傅里叶变换获得频域中信号的功率数据,并对该数据进行归一化操作,再与底噪数据进行对比,并设定阈值以区分噪声和人,获得第二初步判定结果;
12.s5、综合所述第一初步判定结果和第二初步判定结果,最终判断场景中是否有人存在。
13.作为进一步优化,步骤s1中,所述收集回波信号并进行信号处理,对处理后的数据进行静态杂波消除处理,具体包括:
14.对回波信号进行距离维傅里叶变换,得到距离维度上的信息,选取一帧只包含室内背景的雷达回波数据并进行傅里叶变换,将获得的距离维度的信息与背景数据进行做差,从而消除室内的由较大物体产生的静态杂波。
15.作为进一步优化,步骤s2中,所述对得到的静态杂波消除处理后的数据进行反正
切计算获得相位信息,并进行相位进行展开和去趋势操作,具体包括:
16.对静态杂波消除后的数据,根据毫米波雷达中距离与相位成正比的关系,从距离维信息中提取出相位数据;
17.将提取的相位数据进行相位展开处理以获得相位真实值;
18.将展开后的相位数据作分段去趋势处理:通过获得的相位真实值的相邻极值构造线性函数,以此求得每个索引所对应的预测值,再以相位真实值与预测值作差,再累积一定帧数的数据后作傅里叶变换,以此获得频域范围内的信号强度分布情况。
19.作为进一步优化,步骤s2中,所述对静态杂波消除处理后的数据进行信号处理获得点云数据,根据多帧是否持续有点云数判断出所检测场景是否有人存在,具体包括:
20.对静态杂波消除处理后的数据首先作距离维恒虚警判断,筛选出可能的目标位置数据,再作速度维傅里叶变换后进行角度计算,最后通过速度维与角度维恒虚警获得点云数据,根据多帧是否持续有点云数判断出所检测场景是否有人存在。
21.作为进一步优化,步骤s3中,对相位进行展开和去趋势操作后的数据进行低通滤波处理,具体包括:对相位展开和去趋势后的数据进行sg(savitzkygolay)滤波,去除高频噪声,获得低频信号。
22.作为进一步优化,步骤s4中,所述对该数据进行归一化操作,再与底噪数据进行对比,并设定阈值以区分噪声和人,具体包括:
23.对傅里叶变换后的相位数据进行归一化处理,统计无人情况下底噪的信号分布情况与有人情况下信号分布情况,并分别计算两种信号强度的均值,进而计算有人与无人两种情况下信号强度均值的比值,当比值大于一定阈值时,则判定为有人存在,否则,判定为无人存在。
24.作为进一步优化,步骤s5中,所述综合所述第一初步判定结果和第二初步判定结果,最终判断场景中是否有人存在,具体包括:
25.若第一初步判定结果和第二初步判定结果均为判断出有人,则最终判定场景中有人存在;
26.若第一初步判定结果和第二初步判定结果均为判断出无人,则最终判定场景中无人存在;
27.若第一初步判定结果和第二初步判定结果中,其中一个为判断出有人,另外一个为判断出无人,则重复检测方法不少于m次,若其中超过n次出现至少有一个初步判定结果为判断出有人,则最终判定场景中有人存在,否则,最终判定场景中无人存在。
28.本发明的有益效果是:
29.综合考虑由点云数据分析处理获得的有无人判断结果以及由信号强度分布情况的分析比较获得的有无人判断结果,能较为方便且较为准确的判断室内是否有人,并且代码复杂度较低,计算实时性高,能够应用于许多场景中,达到较好的检测效果。
附图说明
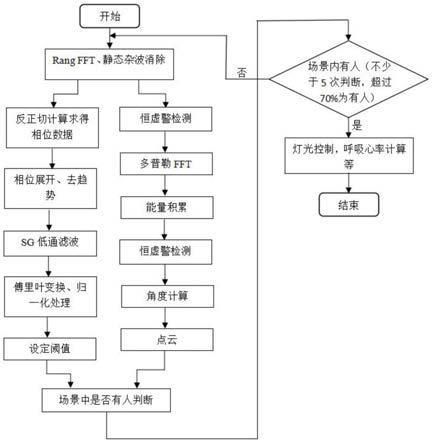
30.图1为本发明实施例中的基于毫米波雷达的有无人检测方法流程图。
具体实施方式
31.本发明旨在提出一种基于毫米波雷达的有无人检测方法,能较为方便且较为准确的判断室内是否有人,提高检测效果。该方法主要包括以下步骤:
32.步骤1、毫米波雷达对将要检测的空间不断发射电磁波信号,收集回波信号并进行信号处理,对处理后的数据进行静态杂波消除处理,可以减少室内较大静态物体所产生的杂波信号对目标回波信号的影响;
33.步骤2、对静态杂波消除处理后的数据进行反正切计算获得相位信息,再对相位进行展开和去趋势操作。同时,对静态杂波消除处理后的数据进行信号处理获得点云数据,根据多帧是否持续有点云数判断出所检测场景是否有人存在,得到第一初步判定结果;
34.步骤3、对相位进行展开和去趋势操作后的数据进行低通滤波处理以获得低频数据;
35.步骤4、对滤波后的数据进行傅里叶变换获得频域中信号的功率数据,并对该数据进行归一化操作,再与底噪数据进行对比,并设定阈值以区分噪声和人,得到第二初步判定结果;
36.步骤5、综合第一初步判定结果和第二初步判定结果,判断场景中是否有人。
37.具体而言,通过毫米波雷达的回波信号进行相关的信号处理操作,得到距离维信息,并作静态杂波消除,通过对静态杂波消除后的数据进行相位提取、相位展开、去趋势和傅里叶变换,获得信号的分布情况,同时对对静态杂波消除后的数据进行距离、速度和角度的信号处理获得点云数据,通过对获得的幅频信号数据进行分析处理和阈值判定,并结合点云数据的判定,可判断当前环境下是有人存在。
38.实施例:
39.本实施例提出的一种基于毫米波雷达的有无人检测方法流程如图1所示,包括以下步骤:
40.步骤1、毫米波雷达对将要检测的空间不断发射电磁波信号,收集回波信号并进行数据处理,对处理后的数据进行静态杂波消除处理,可以减少室内较大静态物体所产生的杂波信号对目标回波信号的影响;
41.其中,对回波信号进行信号处理以及静态杂波的消除处理主要包括:
42.对反射回来的信号进行傅里叶变换,得到距离维度上的信息;为了提高静态杂波消除的有效程度,选择雷达开机时且环境中无人状态下的一帧数据作为背景数据,后续过程中雷达所采集的每一帧数据都与背景数据作差,以最大幅度消除环境中较大物体的回波干扰。
43.步骤2、通过累积一定帧数的静态杂波消除后的数据进行反正切计算获得相位信息,再对相位进行展开得到真实的相位值,并进行去趋势操作以避免相位漂移。同时,对静态杂波消除处理后的数据进行距离维、速度维和角度维的信号处理获得点云数据,根据多帧是否持续有点云数判断出所检测场景是否有人存在;
44.步骤3、对相位进行展开和去趋势操作后的数据进行sg低通滤波处理以消除高频噪声获得低频数据,其中sg滤波的滤波参数根据大量实验测试数据来获得;
45.步骤4、对滤波后的数据进行傅里叶变换获得频域中信号的功率数据,并对该数据进行归一化操作,再与底噪数据进行对比,并设定阈值以区分噪声和人;
46.具体办法为:
47.对傅里叶变换后的相位数据进行归一化处理,统计无人情况下底噪的信号分布情况与有人情况下信号分布情况,并分别计算两种信号强度的均值,进而计算有人与无人两种情况下信号强度均值的比值,当比值大于一定阈值时,当前累积的数据可判断为有人,否则判断为无人,该阈值由实验测试及结合经验取得为0.25。
48.步骤5、根据步骤2中点云数据和步骤4中阈值判定相结合判断场景中是否有人;
49.若步骤2中通过信号处理后获得的点云数据判断出有人且步骤4中根据阈值判断有人则判定所检测场景中有人存在,若两种情况都判定无人则为无人,若其中一种情况判定有人另一种情况判定无人则重复测试9次,若9次中不少于7次出现至少有一种情况判定为有人则判定为有人,否则判定为无人。
50.基于上述,当判定为场景内有人后,可以为后续应用(如灯光控制、呼吸心率计算等)打下坚实基础。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1