固体波动陀螺仪结构及其制备方法与流程
1.本发明涉及微机电和惯性导航技术领域,具体而言,涉及一种固体波动陀螺仪结构及其制备方法。
背景技术:
2.陀螺仪是惯性导航系统的基础部件,其性能直接决定了惯性导航系统的可靠性与准确度,对惯性导航技术的发展起着至关重要的作用。在目前的小型化局部地域高科技战场上,复杂而多变的战场环境迫切需要大量的小型化、轻型化、智能化军事装备与战术武器。其中,基于mems(micro electro-mechanical system,微机电系统)技术的微陀螺仪采用微纳批量制造技术加工,其成本、尺寸、功耗都很低,而且环境适应性、工作寿命、可靠性、集成度与传统技术相比有极大的提高,因而mems微陀螺已经成为近些年来mems技术广泛研究和应用开发的一个重要方向。
3.目前,常用的陀螺仪的工作原理如下:当没有角速度输入时,陀螺仪的谐振子在驱动模态下工作,陀螺仪的输出为零。当有角速度输入时,陀螺仪的谐振子在检测模态下工作,陀螺仪实时测出输入角速度。然而,现有的陀螺仪由于其谐振子的几何结构所限,普遍存在灵敏度较低的问题。
技术实现要素:
4.本发明的目的在于提供一种固体波动陀螺仪结构及其制备方法,该固体波动陀螺仪结构能够提高检测精度。
5.本发明的实施例是这样实现的:
6.本发明的一方面,提供一种固体波动陀螺仪结构,该固体波动陀螺仪结构包括阵列设置的多个陀螺仪;每个陀螺仪包括具有金属线路的基底、中心键合于基底上的环形谐振子、位于基底上且位于环形谐振子内侧的n个第一控制电极,以及位于基底上且位于环形谐振子外侧的n个第二控制电极,n个第一控制电极分别和n个第二控制电极一一对应且均与金属线路电连接,以分别与环形谐振子配合形成2n个电容器,n为大于或等于8的整数。该固体波动陀螺仪结构能够提高检测精度。
7.可选地,环形谐振子包括振动圆环、锚点结构以及连接于振动圆环和锚点结构之间的多个振动弹性梁,其中,锚点结构位于振动圆环的中心,且锚点结构键合于基底上;第一控制电极位于振动圆环和锚点结构之间,多个振动弹性梁一一对应的嵌设于多个第一控制电极内。
8.可选地,振动弹性梁包括8个,且8个所述振动弹性梁以所述锚点结构为中心呈放射状与所述振动圆环相连接。
9.可选地,相邻的两个振动弹性梁之间的夹角为45
°
。
10.可选地,振动弹性梁包括第一直梁、第二直梁和连接第一直梁和第二直梁的框架梁,框架梁呈封闭的多边形结构;第一直梁远离框架梁的一端和振动圆环连接,第二直梁远
离框架梁的一端和锚点结构连接,每个振动弹性梁用于将每个第一控制电极分隔为相互间隔的三部分。
11.可选地,框架梁的形状为六边形。
12.可选地,陀螺仪包括四个,四个陀螺仪呈2
×
2形式排布。
13.可选地,n等于8,相对应的第一控制电极和第二控制电极形成电极组,以得到八组电极组;其中,两组电极组为驱动组,两组电极组为驱动检测组,两组电极组为检测组,两组电极组为检测反馈组;驱动组、检测反馈组、驱动检测组和检测组呈交替排布,且两两之间的夹角均相等。
14.可选地,基底的材料为玻璃;和/或,环形谐振子、第一控制电极以及第二控制电极的材料为硅。
15.本发明的另一方面,提供一种固体波动陀螺仪结构的制备方法,该固体波动陀螺仪结构的制备方法包括:在基底上涂覆第一光刻胶层,并通过曝光、显影工艺在第一光刻胶层上形成露出基底的第一窗口;在第一窗口内溅射金属,以在基底上形成金属线路;去除第一光刻胶层,以得到第一器件;在硅晶圆上涂覆第二光刻胶层,并通过曝光、显影工艺在第二光刻胶层上形成露出硅晶圆的第二窗口;通过第二窗口刻蚀硅晶圆,以形成第一凹槽;去除第二光刻胶层,以得到第二器件;将第一器件具有金属线路的一面与第二器件具有第一凹槽的一面对准,并将第二器件的中心键合于第一器件的基底上;在第二器件远离第一器件的一面涂覆第三光刻胶层,并通过曝光、显影工艺在第三光刻胶层上形成第三窗口;通过第三窗口进行深反应离子刻蚀,以在第二器件上形成环形谐振子、位于环形谐振子内侧且与金属线路电连接的n个第一控制电极、位于环形谐振子外侧且与金属线路电连接的n个第二控制电极,n个第一控制电极分别和n个第二控制电极一一对应,以分别与环形谐振子配合形成2n个电容器,n为大于或等于8的整数;分别制备多个陀螺仪,并将多个陀螺仪阵列设置以得到固体波动陀螺仪结构。
16.本发明的有益效果包括:
17.本技术提供的固体波动陀螺仪结构包括阵列设置的多个陀螺仪;每个陀螺仪包括具有金属线路的基底、中心键合于基底上的环形谐振子、位于基底上且位于环形谐振子内侧的n个第一控制电极,以及位于基底上且位于环形谐振子外侧的n个第二控制电极,n个第一控制电极分别和n个第二控制电极一一对应且均与金属线路电连接,以分别与环形谐振子配合形成2n个电容器,n为大于或等于8的整数。本技术通过设置阵列设置的多个陀螺仪,这样,根据环形谐振子的振动特性与工作原理,当固体波动陀螺仪结构处于静止状态时,每个陀螺仪的每一个电容器都可以等效为静止的平行板电容器;当固体波动陀螺仪结构有角速度输入时,其处于激发态(结构的敏感轴垂直穿过固体波动陀螺仪的中心,可以分别给每个陀螺仪施加驱动力,以使固体波动陀螺仪在驱动模态下同时包含多种方向的振动,如图3),这时,固体波动陀螺仪结构工作在谐振频率时,阵列设置的每个陀螺仪的环形谐振子将发生一定角度的运动,进而引发电容器的电容变化。如此,便可以根据每个陀螺仪的各电容器的变化分析测得每个陀螺仪的角速度,进而通过对多个陀螺仪测得的结果进行加权平均处理得到最终的角速度。本技术的这种测量方式相对采用单个陀螺仪测量角速度而言可以有效缩小测量误差,进而提高整个固体波动陀螺仪的测量精度和稳定性。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
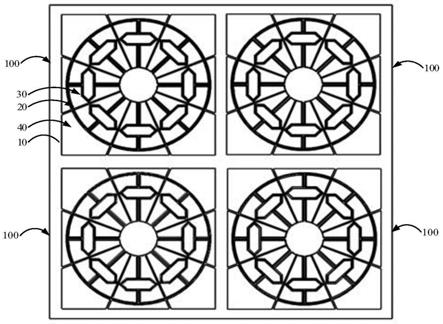
19.图1为本发明实施例提供的固体波动陀螺仪结构的结构示意图;
20.图2为本发明实施例提供的环形谐振子、第一控制电极和第二控制电极的爆炸图;
21.图3为本发明实施例提供的固体波动陀螺仪结构的环形谐振子的驱动模态示意图;
22.图4为本发明实施例提供的环形谐振子的结构示意图;
23.图5为本发明实施例提供的第一控制电极和第二控制电极的结构示意图;
24.图6为本发明实施例提供的固体波动陀螺仪结构的制备方法的流程示意图;
25.图7为本发明实施例提供的固体波动陀螺仪结构的制备方法的制备过程示意图。
26.图标:100-陀螺仪;10-基底;20-环形谐振子;21-振动圆环;22-锚点结构;23-振动弹性梁;231-第一直梁;232-第二直梁;233-框架梁;30、a1、a2、a3、a4、a5、a6、a7、a8-第一控制电极;40、m1、m2、m3、m4、m5、m6、m7、m8-第二控制电极;60-金属线路;71-第一光刻胶层;711-第一窗口;72-第二光刻胶层;721-第二窗口;73-第三光刻胶层;731-第三窗口;80-硅晶圆;81-第一凹槽。
具体实施方式
27.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
30.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
31.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
32.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.请参照图1至图3,本实施例提供一种固体波动陀螺仪100结构包括阵列设置的多个陀螺仪100;每个陀螺仪100包括具有金属线路60的基底10、中心键合于基底10上的环形谐振子20、位于基底10上且位于环形谐振子20内侧的n个第一控制电极30,以及位于基底10上且位于环形谐振子20外侧的n个第二控制电极40,n个第一控制电极30分别和n个第二控制电极40一一对应且均与金属线路60电连接,以分别与环形谐振子20配合形成2n个电容器,n为大于或等于8的整数。该固体波动陀螺仪100结构能够提高检测精度。
34.需要说明的是,本技术提供的固体波动陀螺仪100结构包括阵列设置的多个陀螺仪100,该多个陀螺仪100可以为n
×
n形式阵列。例如,可选地,如图1所示,陀螺仪100可以包括四个,四个陀螺仪100呈2
×
2形式排布。当然,应理解,本技术将陀螺仪100设置为四个仅为本技术给出的一种示例,在其他的实施例中,本领域技术人员也可以根据需要选择其他阵列或者设置形式,本技术不做限制。
35.在本实施例中,上述四个陀螺仪各自的电极(第一控制电极30和第二控制电极40)的使用方式不同,示例地,每个陀螺仪的相同的电极呈错位相差45
°
设置(示例地,以图5为例,第一控制电极a2和第二控制电极m2以及第一控制电极a6和第二控制电极m6在图1的左上角的陀螺仪中位于0
°
和180
°
的方位上;而在图1的右上角的陀螺仪中可以位于45
°
和225
°
的方位上;而在图1的右下角的陀螺仪中可以位于90
°
和270
°
的方位上;而在图1的左下角的陀螺仪中可以位于135
°
和315
°
的方位上)。同理,其余电极同原理设置,本技术不再一一列举。
36.其中,在本实施例中,多个陀螺仪100的结构均相同。为便于理解和说明,下文将主要以其中一种的具体结构进行解释和说明。
37.在本实施例中,陀螺仪100包括基底10、环形谐振子20、第一控制电极30和第二控制电极40。其中,基底10上设有金属线路60,环形谐振子20的中心键合于基底10上,第一控制电极30位于环形谐振子20的内部,而第二控制电极40位于环形谐振子20的外部。需要说明的是,由于第一控制电极30和第二控制电极40分别与金属线路60电连接,因此,基底10上的金属线路60可以根据第一控制电极30和第二控制电极40的分布设置,本领域技术人员可以根据需要自行设置,本技术不做具体限制。
38.n个第一控制电极30分别和n个第二控制电极40一一对应,以分别与环形谐振子20配合形成2n个电容器。为便于理解和说明,本技术将以图2所示的第一控制电极30和第二控制电极40分别包括8个为例进行举例说明。在图2中,第一控制电极a1和环形谐振子20配合形成一个电容器、第一控制电极a2和环形谐振子20配合形成一个电容器、第一控制电极a3和环形谐振子20配合形成一个电容器、第一控制电极a4和环形谐振子20配合形成一个电容器、第一控制电极a5和环形谐振子20配合形成一个电容器、第一控制电极a6和环形谐振子20配合形成一个电容器、第一控制电极a7和环形谐振子20配合形成一个电容器,以及第一控制电极a8和环形谐振子20配合形成一个电容器。同理,第二控制电极m1、第二控制电极
m2、第二控制电极m3、第二控制电极m4、第二控制电极m5、第二控制电极m6、第二控制电极m7、第二控制电极m8也分别与环形谐振子20配合形成电容器。
39.在这里,需要说明的是,本技术的环形谐振子20分别和多个第一控制电极30、多个第二控制电极40之间具有间隙,这样可以形成以空气作为介电质的电容器。
40.在本实施例中,上述第一控制电极30和第二控制电极40的数量相同,且第一控制电极30和第二控制电极40呈一一对应设置。其中,第一控制电极30的数量和第二控制电极40的数量可以为8个、10个等。在图2中,是以第一控制电极30和第二控制电极40均包括8个为例进行示意的。
41.综上所述,本技术提供的固体波动陀螺仪100结构包括阵列设置的多个陀螺仪100;每个陀螺仪100包括具有金属线路60的基底10、中心键合于基底10上的环形谐振子20、位于基底10上且位于环形谐振子20内侧的n个第一控制电极30,以及位于基底10上且位于环形谐振子20外侧的n个第二控制电极40,n个第一控制电极30分别和n个第二控制电极40一一对应且均与金属线路60电连接,以分别与环形谐振子20配合形成2n个电容器,n为大于或等于8的整数。本技术通过设置阵列设置的多个陀螺仪100,这样,根据环形谐振子20的振动特性与工作原理,当固体波动陀螺仪100结构处于静止状态时,每个陀螺仪100的每一个电容器都可以等效为静止的平行板电容器;当固体波动陀螺仪100结构有角速度输入时,其处于激发态(结构的敏感轴垂直穿过固体波动陀螺仪100的中心,可以分别给每个陀螺仪100施加驱动力,以使固体波动陀螺仪100在驱动模态下同时包含多种方向的振动,如图3),这时,固体波动陀螺仪100结构工作在谐振频率时,阵列设置的每个陀螺仪100的环形谐振子20将发生一定角度的运动,进而引发电容器的电容变化。如此,便可以根据每个陀螺仪100的各电容器的变化分析测得每个陀螺仪100的角速度,进而通过对多个陀螺仪100测得的结果进行加权平均处理得到最终的角速度。本技术的这种测量方式相对采用单个陀螺仪100测量角速度而言可以有效缩小测量误差,进而提高整个固体波动陀螺仪100的测量精度和稳定性。
42.需要说明的是,在固体波动陀螺仪100结构有角速度输入时,理论上来说,多个陀螺仪100应该检测出相同的角速度,但是实际上由于各自误差的存在,每个陀螺仪100测得的角速度都与理论值存在不同大小的差异,这时,本技术便可以通过对多个陀螺仪100测得的结果进行加权平均处理,进而相对采用单个陀螺仪100测量角速度而言有效缩小测量误差。
43.请参照图4,在本实施例中,环形谐振子20包括振动圆环21、锚点结构22以及连接于振动圆环21和锚点结构22之间的多个振动弹性梁23,其中,锚点结构22位于振动圆环21的中心,且锚点结构22键合于基底10上;第一控制电极30位于振动圆环21和锚点结构22之间,多个振动弹性梁23一一对应的嵌设于多个第一控制电极30内。
44.其中,振动圆环21位于第一控制电极30和第二控制电极40之间,以图4为例,八个第一控制电极30可以分别和振动圆环21配合形成八个电容器,八个第二控制电极40可以分别和振动圆环21配合形成八个电容器。
45.键合于基底10上的锚点结构22位于振动圆环21的中心,其与振动圆环21之间通过振动弹性梁23连接。需要说明的是,在本实施例中,振动弹性梁23的个数和第一控制电极30的个数相同,且一一对应。
46.可选地,振动弹性梁23包括8个,且8个振动弹性梁23以锚点结构22为中心呈放射状与振动圆环21相连接,相邻的两个振动弹性梁23之间的夹角为45
°
。这样,每一根振动弹性梁23的中心线与x轴的夹角分别为性梁23的中心线与x轴的夹角分别为这与环形谐振子20的固有模态振动主轴线重合,可以有效降低环境阻尼、刚度耦合误差对驱动检测工作模态的影响,提高器件最终的信噪比与角度测试精度。
47.请参照图4,振动弹性梁23包括第一直梁231、第二直梁232和连接第一直梁231和第二直梁232的框架梁233,框架梁233呈封闭的多边形结构;第一直梁231远离框架梁233的一端和振动圆环21连接,第二直梁232远离框架梁233的一端和锚点结构22连接,每个振动弹性梁23用于将每个第一控制电极30分隔为相互间隔的三部分。
48.其中,框架梁233的形状为封闭的多边形。例如,框架梁233可以为菱形、六边形或者八边形等,本技术不再一一列举。
49.请参照图5所示,在本实施例中,第一控制电极30和第二控制电极40的数量n均等于8,相对应的第一控制电极30和第二控制电极40形成电极组(即第一控制电极a1和第二控制电极m1形成一个电极组、第一控制电极a2和第二控制电极m2形成一个电极组、第一控制电极a3和第二控制电极m3形成一个电极组、第一控制电极a4和第二控制电极m4形成一个电极组、第一控制电极a5和第二控制电极m5形成一个电极组、第一控制电极a6和第二控制电极m6形成一个电极组、第一控制电极a7和第二控制电极m7形成一个电极组、第一控制电极a8和第二控制电极m8形成一个电极组),以得到八组电极组;其中,两组电极组为驱动组,两组电极组为驱动检测组,两组电极组为检测组,两组电极组为检测反馈组;驱动组、检测反馈组、驱动检测组和检测组呈交替排布,且两两之间的夹角均相等。
50.在本实施例中,位于振动圆环21的0
°
和180
°
方向上的电极组可以作为驱动组(如图5中的第一控制电极a2和第二控制电极m2形成的电极组与第一控制电极a6和第二控制电极m6形成的电极组),位于振动圆环21的90
°
和270
°
方向上的电极组可以作为驱动检测组(如图5中的第一控制电极a4和第二控制电极m4形成的电极组与第一控制电极a8和第二控制电极m8形成的电极组)。其中,检测反馈组可以为第一控制电极a3和第二控制电极m3形成的电极组以及第一控制电极a7和第二控制电极m7形成的电极组(即位于振动圆环21的45
°
和225
°
方向上的电极组);也可以是第一控制电极a1和第二控制电极m1形成的电极组以及第一控制电极a5和第二控制电极m5形成的电极组(即位于振动圆环21的135
°
和315
°
方向上的电极组)。检测组则为去除驱动组、驱动检测组和检测反馈组之后的电极组。
51.除此之外,本技术还可以再设置两组电极组,即校正组和调谐组。其中,调谐组可以用于调节陀螺仪100的谐振频率,从而保证四个陀螺仪100在驱动模态下振动频率完全相同;校正组可以调节陀螺仪100的零偏,保证四个陀螺仪100在没有角速度输入时的零位输出相同。其中,校正组和调谐组的设置本领域技术人员可自行根据需要确定,本技术不做限制。
52.在这里,需要说明的是,电容器的特性使其既可以作为驱动,又可以作为检测。以单个陀螺仪举例,假设该陀螺仪具有x轴和y轴,则驱动组置于x轴方向且对称于振动圆环21两侧(即对应至振动圆环21的0
°
和180
°
的方位上),驱动检测组置于y轴方向且对称于振动圆环21两侧(即对应至振动圆环21的90
°
和270
°
的方位上),检测组置于x轴45
°
方向且对称于振动圆环21两侧(即对应至振动圆环21的45
°
和225
°
的方位上),检测反馈组置于x轴135
°
方向且对称于振动圆环21两侧(即对应至振动圆环21的135
°
和315
°
的方位上)。当对陀螺仪进行供电且没有角速度输入时,陀螺仪会在驱动组施加的交流信号的作用下给振动圆环21施加驱动力,使得振动圆环21呈现椭圆(长轴沿x轴方向)、圆、椭圆(长轴沿y轴方向)三种形式的振动。驱动检测组与驱动组可以形成闭环使振动圆环21稳定的振动(不至于振动幅度时大时小)。当有角速度输入时,由于柯氏效应,陀螺仪的振动状态会变成椭圆(长轴沿45
°
方向),此时检测组和检测反馈组会检测出输入的角速度。当然,除此之外,本技术还可以设置校正组和调谐组,以用于减小陀螺仪的误差。
53.可选地,基底10的材料为玻璃;和/或,环形谐振子20、第一控制电极30以及第二控制电极40的材料为硅。
54.请参照图6和图7,本发明的另一方面,提供一种固体波动陀螺仪100结构的制备方法,该固体波动陀螺仪100结构的制备方法包括:
55.s100、在基底10上涂覆第一光刻胶层71,并通过曝光、显影工艺在第一光刻胶层71上形成露出基底10的第一窗口711,请参照图7a和图7b。
56.s200、在第一窗口711内溅射金属,以在基底10上形成金属线路60,请参照图7c。
57.s300、去除第一光刻胶层71,以得到第一器件,请参照图7d。
58.其中,第一窗口711的设置可以根据在基底10上所需形成的金属线路60的结构而定,本技术不做具体限制。
59.另外,需要说明的是,在执行步骤s100之前,还需要对基底10进行清洗处理,例如,采用标准化清洗流程对基底10进行处理。
60.s400、在硅晶圆80上涂覆第二光刻胶层72,并通过曝光、显影工艺在第二光刻胶层72上形成露出硅晶圆80的第二窗口721,请参照图7e和图7f。
61.s500、通过第二窗口721刻蚀硅晶圆80,以形成第一凹槽81,请参照图7g。
62.需要说明的是,在对硅晶圆80进行刻蚀以形成第一凹槽81时,请参照图7g所示,此时,通过第一凹槽81隔开的结构可以在后续步骤中用于形成环形谐振子20的锚点结构22、第一控制电极30和第二控制电极40。其中,锚点结构22、第一控制电极30和第二控制电极40为相互隔开的孤岛结构。
63.s600、去除第二光刻胶层72,以得到第二器件,请参照图7g。
64.在去除第二光刻胶层72后,也需要对第二器件进行标准清洗液清洗,以去除第二光刻胶层72和有机物的残留物。
65.s700、将第一器件具有金属线路60的一面与第二器件具有第一凹槽81的一面对准,并将第二器件的中心键合于第一器件的基底10上,请参照图7h。
66.其中,第一器件和第二器件的对准可以在光刻机上完成。
67.s800、在第二器件远离第一器件的一面涂覆第三光刻胶层73,并通过曝光、显影工艺在第三光刻胶层73上形成第三窗口731,请参照图7i。
68.第三窗口731的形成是为了通过在第二器件远离第一器件的一面进行刻蚀,以得到环形谐振子20、第一控制电极30和第二控制电极40。
69.s900、通过第三窗口731进行深反应离子刻蚀,以在第二器件上形成环形谐振子20、位于环形谐振子20内侧且与金属线路60电连接的n个第一控制电极30、位于环形谐振子20外侧且与金属线路60电连接的n个第二控制电极40,n个第一控制电极30分别和n个第二
控制电极40一一对应,以分别与环形谐振子20配合形成2n个电容器,n为大于或等于8的整数,请参照图7j。
70.其中,环形谐振子20的具体结构可以参见前文中固体波动陀螺仪100结构的描述,本技术对此不再进行重复说明。
71.本技术采用一个硅晶圆80一次性制备出环形谐振子20、位于环形谐振子20内侧且与金属线路60电连接的n个第一控制电极30、位于环形谐振子20外侧且与金属线路60电连接的n个第二控制电极40。其制备方法简单。
72.s910、分别制备多个陀螺仪100,并将多个陀螺仪100阵列设置以得到固体波动陀螺仪100结构。
73.由于每个陀螺仪100的制备方式与步骤s100至步骤s900相同,故本技术不再赘述。本技术通过上述制备方法制备出多个陀螺仪100,并将多个陀螺仪100以阵列形式设置可以得到固体波动陀螺仪100结构。该固体波动陀螺仪100结构在无角速度输入时,环形谐振子20在驱动模态下工作,环形谐振子20处于静止状态;当有角速度输入时,环形谐振子20在检测模态下工作,第一控制电极30和第二控制电极40共同作用,环形谐振子20运动。使得此时陀螺仪100的电容器的电容值发生变化,如此,便可以根据每个陀螺仪100的电容器的变化分析测得每个陀螺仪100的角速度,进而通过对多个陀螺仪100测得的结果进行加权平均处理得到最终的角速度。本技术的这种测量方式相对采用单个陀螺仪100测量角速度而言可以有效缩小测量误差,进而提高整个固体波动陀螺仪100的测量精度和稳定性。
74.以上所述仅为本发明的可选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
75.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1