生物体检测装置的制作方法
1.本发明涉及生物体检测装置。
背景技术:
2.以往,存在向人照射电波,对反射波的多普勒频移进行频率解析从而计算生物体信息(脉搏、呼吸、身体活动等)的技术。另外,还存在基于fmcw(frequency modulated continuous wave:调频连续波)方式的电波的收发,判定车辆(乘用车等)的车厢内有无人(乘客)的技术。在fmcw方式中,照射电波,能够根据多普勒频移求出反射波反射的位置和该位置的速度。若组合上述技术,则能够检测车厢内的人和其生物体信息。
3.专利文献1:日本特开2019-126407号公报
4.专利文献2:日本特开2020-101415号公报
5.然而,在上述现有技术中,有时产生在车厢内没有人的位置却检测出有人的现象(以下,称为幻影。)。
技术实现要素:
6.因此,本发明的课题正是鉴于上述情况而完成的,提供一种在检测车辆的车厢内的人时,能够高精度地判定检测出的人是否是幻影的生物体检测装置。
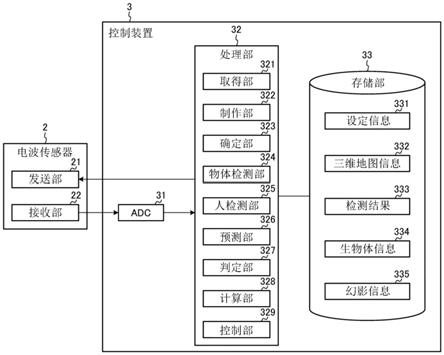
7.为了解决上述课题,实施方式的生物体检测装置具备:电波传感器,其具备向车辆的车厢内发送fmcw调制后的发送波的发送部、以及接收通过上述发送波被上述车厢内的物体反射而产生的反射波的接收部;制作部,其基于上述反射波,制作上述车厢内的三维地图信息;确定部,其在上述三维地图信息中,确定具有针对上述发送波的规定以上的反射强度的物体亦即反射源的位置以及反射强度;物体检测部,其基于上述反射波的多普勒频移来检测上述车厢内的物体的移动并输出检测结果;人检测部,其基于上述三维地图信息和上述检测结果来检测一个以上的乘客;预测部,其针对由上述人检测部检测出的各个上述乘客,基于上述乘客的位置、上述反射源的位置以及反射强度,关于与上述乘客对应地检测的幻影,预测包含位置的信息并生成幻影信息;以及判定部,其针对由上述人检测部检测出的各个上述乘客,基于上述乘客的位置和上述幻影信息,判定作为该乘客而检测出的物体是否是幻影。
8.根据这样的结构,基于乘客的位置、反射源的位置以及反射强度,生成幻影信息,从而能够高精度地判定作为人被检测出的物体是否是幻影。
9.另外,在上述生物体检测装置中,针对由上述人检测部检测出的各个上述乘客,上述预测部基于从上述乘客的位置到上述反射源的位置的距离、和从上述反射源的位置到上述电波传感器的距离,预测上述发送波的由该乘客反射的反射波由上述反射源进一步反射之后向上述电波传感器入射时会被检测的上述幻影的位置。
10.根据这样的结构,能够高精度地判定作为人被检测出的物体是否是多路径引起的幻影。
11.另外,在上述生物体检测装置中,针对由上述人检测部检测出的各个上述乘客,上述预测部基于从上述电波传感器到上述乘客的位置的距离、和从上述电波传感器到上述反射源的位置的距离,预测通过上述发送波的由该乘客反射的反射波与上述发送波的由该反射源反射的反射波的干涉而会被检测的上述幻影的位置。
12.根据这样的结构,能够高精度地判定作为人被检测出的物体是否是干涉引起的幻影。
13.另外,在上述生物体检测装置中,上述预测部基于上述人检测部按时间序列检测的多个检测结果,作为上述幻影信息还预测与上述幻影对应的上述乘客移动时的上述幻影的移动,上述判定部基于上述人检测部按时间序列检测的多个检测结果,针对由上述人检测部检测出的各个上述乘客,基于该乘客的移动和上述幻影信息中的上述幻影的移动的信息,判定作为该乘客被检测出的物体是否是幻影。
14.根据这样的结构,预测与幻影对应的乘客移动时的幻影的移动,从而能够进一步高精度地判定作为人被检测出的物体是否是幻影。
15.另外,在上述生物体检测装置中,上述预测部在预测出的上述幻影的位置是上述车辆的外部的情况下,从判定对象中除去该幻影。
16.根据这样的结构,能够从处理对象中除去不需要的幻影,能够减轻处理的负担。
附图说明
17.图1是是实施方式的车辆的示意图。
18.图2是表示实施方式的电波传感器和控制装置的功能结构的框图。
19.图3是表示实施方式的fmcw方式的信号处理的概要的说明图。
20.图4是实施方式的多路径引起的幻影产生的说明图。
21.图5是实施方式的干涉引起的幻影产生的说明图。
22.图6是表示实施方式的控制装置的处理的流程图。
23.图7是表示图6的步骤s8的详细内容的第一例的流程图。
24.图8是表示图6的步骤s8的详细内容的第二例的流程图。
25.图9是变形例的车辆的示意图。
26.图10是变形例的车辆的示意图。
27.图11是变形例的电波传感器2的设置的情形的示意图。
28.附图标记的说明
[0029]1…
生物体检测装置,2
…
电波传感器,3
…
控制装置,21
…
发送部,22
…
接收部,31
…
adc,32
…
处理部,33
…
存储部,321
…
取得部,322
…
制作部,323
…
确定部,324
…
物体检测部,325
…
人检测部,326
…
计算部,327
…
控制部,331
…
设定信息,332
…
三维地图信息,333
…
检测结果,334
…
生物体信息,c
…
车辆,m
…
乘客,s
…
座位。
具体实施方式
[0030]
以下,参照附图来说明本发明的生物体检测装置的实施方式。
[0031]
图1是实施方式的车辆c的示意图。在车辆c的车厢内配置有构成生物体检测装置1的电波传感器2和控制装置3。电波传感器2设置于车厢内的顶棚部分。控制装置3例如被设
specific integrated circuit:专用集成电路)、包含fpga(field-programmable gate array:现场可编程门阵列)的电路等硬件构成。
[0047]
取得部321从adc31取得反射波信息。
[0048]
制作部322基于反射波信息制作车厢内的三维地图信息,并作为三维地图信息332保存于存储部33。
[0049]
确定部323确定在车辆c停车时制作出的三维地图信息332的反射源的位置。
[0050]
物体检测部324基于反射波的多普勒频移检测车厢内的物体的移动,并将检测结果作为检测结果333保存在存储部33。
[0051]
人检测部325在车辆c停车时,基于设定信息331、三维地图信息332、检测结果333来检测一个人以上的乘客m。另外,人检测部325在检测出乘客m的情况下,对与乘客m对应的人信号按照强度从大到小的顺序进行标记。
[0052]
预测部326针对由人检测部325检测出的各个乘客,基于乘客的位置、反射源的位置以及反射强度,关于与乘客对应的幻影,预测包含位置的信息并生成幻影信息。即、关注的是在抽出人信号之前的三维地图信息中信号的强度(以下,也简称为“强度”。)大的部位是反射率高的部分,这称为成为幻影的原因这一点,所以基于乘客的位置、反射源的位置以及反射强度,来预测幻影的产生位置。以下,说明预测部326针对多路径(
マルチパス
)引起的幻影和干涉引起的幻影的各个的处理。
[0053]
图4是实施方式的多路径引起的幻影产生的说明图。图4的(a)表示车厢内的实际的状态,图4的(b)表示检测出的乘客m和幻影(区域a1)。
[0054]
若由乘客m反射的信号碰到反射率高的反射源r并进一步反射之后返回到电波传感器2,则产生多路径引起的幻影。特别是,因车辆c包含较多的金属、车厢内是封闭空间等而容易产生该问题。
[0055]
另外,幻影时的信号虽与原信号相比信号的强度变小,但在原信号大的情况下,存在无法区别检测出的人信号是与实际的乘客m对应的信号还是幻影的情况。此外,在图4中虽乘客m仅表示了一人,但乘客m也可以是两人以上(图5也同样)。
[0056]
预测部326如以下那样计算多路径引起的幻影的位置、信号的强度。预测部326针对由人检测部325检测出的各个乘客m,基于从乘客m的位置到反射源r的位置的距离、从反射源r的位置到电波传感器2的距离,预测发送波的被该乘客m反射的反射波由反射源r进一步反射之后向电波传感器2入射时会被检测的幻影的位置和强度,在位置是车厢内且强度是人阈值以上的情况下,将预测结果作为幻影信息335保存于存储部33。
[0057]
关于幻影的位置,例如基于从乘客m的位置到反射源r的位置的距离、从反射源r的位置到电波传感器2的距离、反射源r的位置以及电波传感器2的位置等来进行预测。另外,幻影的强度基于乘客m的信号的强度、反射源r的信号的强度、以及反射源r与电波传感器2的位置关系等来进行预测。
[0058]
图5是实施方式的干涉引起的幻影产生的说明图。图5的(a)表示车厢内的实际的状态,图5的(b)表示检测出的乘客m和幻影(区域a2)。
[0059]
若从电波传感器2到反射源r的距离、与从电波传感器2到乘客m的距离相等(也包含大致相等的情况。),则电波传感器2的接收部22接收的两个反射波干涉,产生干涉引起的幻影。特别是,由于车辆c包含较多的金属、车厢内为封闭空间等,所以容易产生该问题。
[0060]
另外,幻影时的信号虽与原信号相比信号的强度变小,但在原信号大的情况下,存在无法区别检测出的人信号是与实际的乘客m对应的还是幻影的情况。
[0061]
因此,预测部326如以下那样计算干涉引起的幻影的位置、信号的强度。预测部326针对由人检测部325检测出的各个乘客m,基于从电波传感器2到乘客m的位置的距离、从电波传感器2到反射源r的位置的距离等,预测通过发送波的由该乘客m反射的反射波与发送波的由该反射源r反射的反射波的干涉而检测的幻影的位置。
[0062]
进一步具体而言,预测部326将干涉后的信号的强度是人阈值以上的情况设为幻影。干涉后的信号的强度基于从电波传感器2到反射源r的距离和角度、从电波传感器2到乘客m的距离和角度、由反射源r反射的信号的强度、由乘客m反射的信号的强度等来计算。
[0063]
返回到图2,另外,预测部326在预测出的幻影的位置是车辆c的外部的情况下,从处理对象中除去该幻影。此外,幻影随着信号的反射、干涉,通常比人信号小,所以标记编号越大,幻影的可能性越高。
[0064]
判定部327针对由人检测部325检测出的各个乘客m,基于乘客m的位置和幻影信息,判定该乘客m是否是幻影。
[0065]
另外,预测部326也可以基于由人检测部325按时间序列检测的多个检测结果,作为幻影信息335,还预测与幻影对应的乘客m移动时的幻影的移动。在该情况下,判定部327基于由人检测部325按时间序列检测的多个检测结果,针对由人检测部325检测出的各个乘客m,基于该乘客n的移动和幻影信息335的幻影的移动的信息,来判定该乘客m是否是幻影。
[0066]
计算部328基于检测结果333等计算伴随与乘客m相关的移动的生物体信息。生物体信息的一个例子是乘客m的心率。在来自发送部21的发送波由乘客m的胸部反射的情况下,由前后振动的胸部引起的多普勒效果的影响被反映在反射波中。因此,计算部328基于从反射波的信号导出的多普勒频率来计算生物体信息。
[0067]
控制部329执行各部321~328执行的运算以外的运算。
[0068]
图6是表示实施方式的控制装置3的处理的流程图。在步骤s1中,取得部321从adc31取得反射波信息。
[0069]
接下来,在步骤s2中,制作部322基于反射波信息制作车厢内的三维地图信息322。
[0070]
接下来,在步骤s3中,制作部322基于信号的强度的最大值等,决定反射源阈值。
[0071]
接下来,在步骤s4中,确定部323使用反射源阈值来确定三维地图信息332的反射源的位置。
[0072]
接下来,在步骤s5中,在由物体检测部324进行的车厢内的物体检测之后,人检测部325通过频率解析抽出人信号。
[0073]
接下来,在步骤s6中,人检测部325基于人信号的强度的最大值等,决定人阈值。
[0074]
接下来,在步骤s7中,人检测部325检测乘客m,针对与乘客m对应的人信号,以强度从大到小的顺序进行标记。
[0075]
接下来,在步骤s8中,处理部32进行幻影处理。这里,图7是表示图6的步骤s8的详细内容的第一例(多路径引起的幻影的情况)的流程图。
[0076]
首先,在步骤s801~s806中,针对检测出的所有人(人信号),进行步骤s802~s805的处理。
[0077]
在步骤s802中,预测部326计算从乘客m经由反射源而向电波传感器2入射的信号
的强度和检测位置。
[0078]
接下来,在步骤s803中,预测部326判定强度是否是人阈值以上,在是的情况下,进入步骤s804,在否的情况下,跳过步骤s804、s805。
[0079]
接下来,在步骤s804中,预测部326判定检测位置是否是车厢内,在是的情况下,进入步骤s805,在否的情况下,跳过步骤s805。
[0080]
在步骤s805中,预测部326将计算结果(幻影的位置、强度等)作为幻影信息335保存在存储部33。
[0081]
在步骤s801~s806的处理之后,在步骤s807~s810中,对检测出的所有人(人信号),进行步骤s808、s809的处理。
[0082]
在步骤s808中,判定部327基于乘客m(人)的位置、幻影信息(幻影的位置、强度等),判定乘客m是否是幻影,在是的情况下,进入步骤s809,在否的情况下,跳过步骤s809。
[0083]
在步骤s809中,判定部327将判定结果保存在存储部33。例如,从人检测部325的人的检测结果中删除判定为幻影的部分。
[0084]
在步骤s807~s810的处理之后,在步骤s811中,人检测部325判定是否存在幻影的人(人信号),在是的情况下,进入步骤s812,在否的情况下,结束处理。
[0085]
在步骤s812中,人检测部325针对剩余的人信号,按强度从大到小的顺序再次进行标记。
[0086]
图8是表示图6的步骤s8的详细内容的第二例(干涉引起的幻影的情况)的流程图。
[0087]
首先,在步骤s821~s827中,针对检测出的所有人(人信号),进行步骤s822~s826的处理。
[0088]
在步骤s822中,预测部326计算从电波传感器2到乘客m(人)的距离亦即第一距离。
[0089]
接下来,在步骤s803中,预测部326判定是否存在到电波传感器2的距离与第一距离相同的(还包含规定的距离阈值以下的情况。)反射源,在是的情况下,进入步骤s824,在否的情况下,跳过步骤s824~s826。
[0090]
在步骤s824中,预测部326针对从反射源向电波传感器2入射的信号,计算与由乘客m反射的反射波(信号)干涉后的强度。
[0091]
接下来,在步骤s825中,预测部326判定强度是否是人阈值以上,在是的情况下,进入步骤s826,在否的情况下,跳过步骤s826。
[0092]
在步骤s826中,预测部326将计算结果(幻影的位置、强度等)作为幻影信息335保存在存储部33。
[0093]
在步骤s821~s827的处理之后,在步骤s828~s831中,对检测出的所有人(人信号),进行步骤s829、s830的处理。
[0094]
在步骤s829中,判定部327基于乘客m(人)的位置、和幻影信息(幻影的位置、强度等),判定乘客m是否是幻影,在是的情况下,进入步骤s830,在否的情况下,跳过步骤s830。
[0095]
在步骤s830中,判定部327将判定结果保存在存储部33。例如,从人检测部325的人的检测结果中删除判定为幻影的部分。
[0096]
在步骤s828~s831的处理之后,在步骤s832中,人检测部325判定是否存在幻影的人(人信号),在是的情况下,进入步骤s833,在否的情况下,结束处理。
[0097]
在步骤s833中,人检测部325对剩余的人信号,按强度从大到小的顺序再次进行标
记。
[0098]
返回到图6,在步骤s8之后,在步骤s9中,计算部328对标记出的人信号的各个进行频率解析,计算生物体信息。
[0099]
这样,根据本实施方式的生物体检测装置1,基于乘客m的位置、反射源的位置以及反射强度,生成幻影信息,从而能够高精度地判定检测出的人是否是幻影。即、能够防止由幻影引起的误检测,能够高精度地检测人。
[0100]
另外,能够应对检测出的人是多路径引起的幻影的情况和是干涉引起的幻影的情况中的任一个情况。
[0101]
另外,预测与幻影对应的乘客m移动时的幻影的移动,从而能够进一步高精度地判定检测出的人是否是幻影。
[0102]
另外,在幻影的位置是车辆c的外部的情况下,除去该幻影,从而能够从处理对象中除去不需要的幻影,能够减轻处理的负担。
[0103]
(变形例)
[0104]
图9是变形例的车辆c的示意图。也可以在车辆c的车厢内,在不是顶棚的前部设置电波传感器2,进行乘客检测和生物体信息计算。
[0105]
图10是变形例的车辆c的示意图。也可以在车辆c的车厢内,不在顶棚、前部而在各个座位s的内部设置电波传感器2,进行乘客检测和生物体信息计算。
[0106]
图11是变形例的电波传感器2的设置的情形的示意图。也可以在浴室的浴缸b上的顶棚部分设置电波传感器2,进行乘客检测和生物体信息检测。这样,例如在入浴中的老人发生了急症的情况下,在该老人的脉搏、呼吸、身体活动有规定的变化时,能够高精度地检测该急症。
[0107]
此外,由控制装置3执行的程序也可以以能够安装的形式或者以能够执行的形式的文件存储在cd-rom、cd-r、存储卡、dvd(digital versatile disk:数字多功能盘)、软盘(fd)等可由计算机读取的存储介质而作为计算机程序产品来提供。另外,也可以将该程序存储于与因特网等网络连接的计算机上,通过经由网络下载来提供。另外,也可以经由因特网等网络来提供或者分发该程序。
[0108]
以上,虽对本发明的实施方式进行了说明,但上述实施方式是作为例子而提示的,并不意图限定发明的范围。其新的实施方式能够以其它的各种形态来实施,在不脱离发明的宗旨的范围内,能够进行各种省略、置换、改变。该实施方式、其变形包含在发明的范围、宗旨内,并且包含在技术方案所记载的发明和其等同的范围内。
[0109]
例如,车厢内的反射源中的、在该反射源与电波传感器2之间存在其它反射源的情况,难以成为幻影产生的原因,所以也可以将其从幻影计算的对象中除去。
[0110]
另外,检测出的人信号中的、强度最大的人信号是幻影的可能性低,所以也可以将其从幻影计算的对象中除去。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1