一种基于Makima算法获得CMM测量范围内任意点几何误差的方法
一种基于makima算法获得cmm测量范围内任意点几何误差的方法
技术领域
1.本发明涉及一种对三坐标测量机(coordinate measuring machine,简称cmm)测量范围内全部几何误差插值补偿的方法,特别是基于多站位激光追踪测量的技术方法,属于精密测量技术领域。
背景技术:
2.随着航空工业、风能发电、船舶等领域对大型零部件检测需求的不断增加,对于能够对大尺寸、复杂形体的大型零件进行几何检测的大型三坐标测量机(coordinate measuring machine,cmm)的要求越来越高。如何提高cmm的测量精度是一个亟待解决的问题。
3.cmm主要的误差来源为静态误差,约占总误差的60%-70%。几何误差为静态误差的重要组成部分。常用的机床误差补偿方法是利用激光干涉仪、自准直仪等高精度光学仪器直接分离cmm的21项几何误差,然后对各单项误差分别进行补偿,这种方法需要较多的光学元件,需要针对不同的误差源搭建相应的光路,且无法对21项误差实现全部测量,耗时较长,很难满足快速、高效测量的需求。现有的利用激光跟踪仪标定三坐标测量机的方法假定cmm其中两个轴误差不存在,对建立的cmm完全刚体模型进行简化,得到关于运动轴的六项几何误差与体积误差的模型进而求解,依次获得另外两轴的几何误差,该方法对路径规划要求严苛,测量效率较低,且无法获得cmm测量空间内标定路径之外的测量空间内的几何误差。利用激光追踪多站测量技术结合lasso算法可以对坐标测量机规划路径包含空间内的几何误差进行补偿,但无法对cmm整个测量空间的几何误差进行补偿。
4.为此有必要发明一种基于makima算法对激光追踪仪标定cmm的规划测量空间进行扩展,实现对cmm空域内任意点的几何误差进行求解,以提高cmm几何误差的补偿效率及补偿精度。
技术实现要素:
5.基于makima算法获得cmm测量范围内任意点几何误差的方法,目的是提供一种方法对cmm的局部几何误差进行插值获得cmm测量空间内任意点几何误差的方法,使cmm空域内任意点的几何误差都能得到补偿。本方法具有操作简单、高效便捷等特点。
6.为达到以上目的,本发明是采取如下技术方案予以实现的:
7.一种基于makima算法获得cmm测量范围内任意点几何误差的方法,该方法包括下述步骤:
8.步骤一:构建基于cmm的激光追踪仪多站位测量模型。
9.cmm空间坐标系下,设cmm空间内待测点为ai(xi,yi,zi),xi、yi、zi分别为cmm空间内的x、y、z三个坐标方向的坐标值,其中i=1,2,3,
…
,n,n表示待测点的个数,且取正整数;激光追踪仪的站位坐标为pj(xj,yj,zj),其中j=1,2,3,
…
,m,m表示站位坐标的个数,且取正
整数;pj到a1点的距离为dj;测量过程中激光追踪仪的测量数据为l
ij
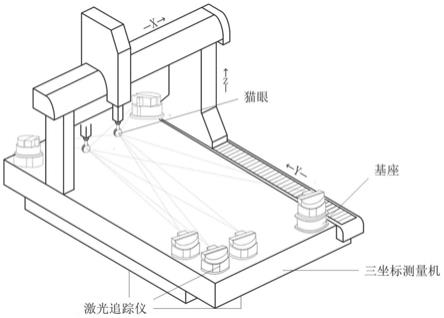
,测量模型如图1所示,激光追踪仪的猫眼固定安装在cmm的测头上。按三维空间两点距离公式建立下列关系式:
[0010][0011]
方程个数为m
×
n,未知数个数为4m+3n。为使方程组可解同时站位个数m最小,应满足:
[0012]m×
n≥4m+3n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0013]
则有m和n满足m≥4,n≥16。同时,多站位测量系统中激光追踪仪的站位不能在同一平面内。
[0014]
步骤二:将激光追踪仪固定在cmm平台上,此时激光追踪仪的站位初始点为p1,控制cmm移动猫眼按照规划的路径依次从第1个待测点a1移动至第i个待测点ai,同时获取激光追踪仪的测量数据l
i1
,随后将激光追踪仪转站,按规划路径移动猫眼完成所有待测点测量数据l
ij
的测量。
[0015]
步骤三:求解待测点实际坐标值(x
′i,y
′i,z
′i)。
[0016]
利用levenberg-marquardt算法进行站位自标定及测量点实际位置求解。
[0017]
步骤四:求解cmm的体积误差。
[0018]
将坐标测量机的实际坐标值带入公式(3)求解体积误差。
[0019][0020]ai
(xi,yi,zi)为测量点坐标值,a
′i(x
′i,y
′i,z
′i)为实际坐标值,(δ
x
a,δya,δza)为a点的测量体积误差。
[0021]
步骤五:建立cmm的准刚体模型,cmm模型图如图3所示。得到体积误差与21项几何误差的关系模型。
[0022][0023][0024][0025]
公式(4)-(6)中δx,δy,δz为体积误差;δ
x
(x),δy(y),δz(z)为定位误差;δ
x
(y),δ
x
(z),δy(x),δy(z),δz(x),δz(y)为直线度误差;ε
x
(x),εy(x),εz(x),ε
x
(y),εy(y),εz(y),ε
x
(z),εy(z),εz(z)为cmm的角度误差;s
xy
,s
zx
,s
yz
为垂直度误差。
[0026]
步骤六:求解垂直度误差。
[0027]
为了提高垂直度检定的精度,采用协方差矩阵的奇异值分解(singular value decomposition,简称svd)变换进行平面拟合。将l-m算法求得的理论上在同一个平面的待
测点的真实坐标值标拟合成一个平面。拟合平面满足真实坐标到拟合平面距离的残差最小。
[0028]
设拟合平面为:
[0029]
ax
′i+by
′i+cz
′i+e=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0030]
最小奇异值对应的奇异向量即为拟合后的平面方程法向量方向
[0031]
通过求解svd即可得到拟合后的平面方程系数a、b、c、e,从而得到拟合后的平面方程ax
′i+by
′i+cz
′i+e=0。
[0032]
设关于平行于yz平面的拟合平面方程为a
x
x
′i+b
xy′i+c
xz′i+e
x
=0,平行于xz平面的拟合平面方程为ayx
′i+byy
′i+cyz
′i+ey=0,平行于xy平面的拟合平面方程为azx
′i+b
zy′i+czz
′i+ez=0,则垂直度误差为
[0033][0034]
步骤七:建立线性方程组。
[0035]
将公式(4)-(6)整理成以下公式(9)
[0036]ai
xi=biꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0037]
其中
[0038][0039][0040]bi
=[δxi+y
i1
α
xy
+z
i1
α
zx
,δyi+z
i1
α
yz
,δzi]
t
[0041]
设其余18项几何误差对应的误差个数为f个,对应规划测量点个数为n个,则由公式(9)组成的方程组为
[0042][0043]
其中δ
x
(x)是x轴的定位误差所构成的矩阵,矩阵大小与x轴所规划的测量范围及
步长大小有关,其余x轴的几何误差均与δ
x
(x)有相同含义,e
xx1
为单位矩阵,长度与x轴所规划的测量范围及步长大小有关,其余单位矩阵的定义均与e
xx1
相同。(z+z1)1是εy(x)的系数矩阵,因此(z+z1)1的大小与εy(x)相同,其余系数矩阵均有相同的含义。
[0044]
步骤八:利用lasso算法求解方程组。
[0045]
将公式(10)写为
[0046]
ax=b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0047]
假设数据是经过一些预处理的:样本中心化并且是列单位长度的,b是中心化的,即
[0048][0049]
可以得到一组线性回归系数使得则lasso的优化目标为
[0050][0051]
t——调和参数(大于等于零)
[0052]
利用lasso算法,求得几何误差。
[0053]
步骤九:利用makima算法求规划测量空间内的几何误差
[0054]
设a(xi,yi,zi)与a(x
i+1
,y
i+1
,z
i+1
)为测量点坐标,hi与h
i+1
为xi与x
i+1
处对应的几何误差,h
′i与h
′
i+1
为几何误差对应的导数,为计算ai与a
i+1
点中间任意一点的几何误差采用makima算法进行插值有:
[0055][0056]
从公式(13)得出该算法不仅需要测量点a(xi,yi,zi)、a(x
i+1
,y
i+1
,z
i+1
)及几何误差hi与h
i+1
,同时还需要几何误差的导数h
′i与h
′
i+1
。假定是区间[xi,x
i+1
)上的斜率,是区间[x
i-1
,xi)上的斜率,则测量点xi处几何误差的斜率为附近斜率的加权平均值:
[0057][0058]
权重计算公式为:
[0059][0060]
[0061]
需要斜率δ
i-2
,δ
i-1
,δi,δ
i+1
,δ
i+2
,计算这些斜率则需要x
i-2
,x
i-1
,xi,x
i+1
,x
i+2
,x
i+3
六个点,对于要插值的点,需要向左右边界各扩充两个点。
[0062]
步骤十:利用makima算法求解规划测量空间外的几何误差
[0063]
对规划测量空间点的几何误差进行求解时需将空间向外拓展,makima算法空间推展方向如下:
[0064]
若已知三个点xi,x
i+1
,x
i+2
和对应的几何误差hi,h
i+1
,h
i+2
,则扩展右边界(x
i+3
,h
i+3
),(x
i+4
,h
i+4
),扩展左边界为(x
i-1
,h
i-1
),(x
i-2
,h
i-2
),使其满足
[0065]
x
i+4-x
i+2
=x
i+3-x
i+1
=x
i+2-xiꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0066][0067]
以及
[0068]
x
i+2-xi=x
i+1-x
i-1
=x
i-x
i-2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0069][0070]
根据δi,δ
i+1
之间根据计算出来,将公式(18)(20)改写为
[0071]
δ
i+3-δ
i+2
=δ
i+2-δ
i+1
=δ
i+1-δiꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0072]
δ
i+1-δi=δ
i-δ
i-1
=δ
i-1-δ
i-2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0073]
由此得
[0074][0075]
若仅有两个点(xi,hi),(x
i+1
,h
i+1
)的话,仅能计算出斜率直接令δ
i-2
=δi,δ
i-1
=δi,δ
i+1
=δi,δ
i+2
=δi[0076]
综上所述,以激光追踪仪多站位测量技术为基础,结合l-m算法求解测量点实际坐标,随后获得体积误差;cmm准刚体模型结合奇异值分解及lasso算法求解cmm几何误差,随后利用makima算法求解cmm规划测量空间内任意点的几何误差,随后采用空间拓展的方式求解规划测量空间外的任意点的几何误差,进而提高cmm的测量精度。
附图说明
[0077]
图1是cmm多站位测量系统示意图。
[0078]
图2是cmm模型图。
[0079]
图3是svd方法拟合的xy平面图。
[0080]
图4a是x轴位移误差图。
[0081]
图4b是x轴角度误差图。
[0082]
图5a是y轴位移误差图。
[0083]
图5b是y轴角度误差图。
[0084]
图6a是z轴位移误差图。
[0085]
图6b是z轴角度误差图。
[0086]
图7(a)是利用makima算法获得的x轴位移误差图。
[0087]
图7(b)是利用makima算法获得的x轴角度误差图。
[0088]
图8(a)是利用makima算法获得的y轴位移误差图。
[0089]
图8(b)是利用makima算法获得的y轴角度误差图。
[0090]
图9(a)是利用makima算法获得的z轴位移误差图。
[0091]
图9(b)是利用makima算法获得的z轴角度误差图。
具体实施方式
[0092]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0093]
实验中采用如图1所示的cmm多站位测量系统来进行相对干涉测长值的测量,因此通过下述步骤进行分析:
[0094]
步骤一:构建cmm激光追踪仪多站位测量模型。考虑测量精度和实验所需时间,确定激光追踪仪站位的个数为6,其中4个站位为激光追踪仪固定在cmm平台上,其余两个站位为有高度差的站位。
[0095]
步骤二:规划测量路径,空间待测点在cmm坐标系下的个数为291个。将激光追踪仪固定在cmm的平台上,站位为p1,如图1所示,按预设的路劲移动靶镜,记录到达待测点时激光追踪仪测得的数据l
i1
,直到完成全部291个测点的测量;随后进行转站,并按规划路径移动靶镜完成所有待测点测量数据l
ij
的测量,共获得6组测量数据。
[0096]
步骤三:利用l-m算法求解站位坐标求解出激光追踪仪的站位坐pj(xj,yj,yj)、pj到a1点的距离dj(如表1所示)及测量点的实际坐标(x
′i,y
′i,z
′i)。
[0097]
表1激光追踪仪站位坐标及初始距离
[0098]
[0099]
步骤四:将求得的测量点的实际坐标(x
′i,y
′i,z
′i)和测量点的规划坐(xi,yi,zi)带入体积误差公式(3)求得体积误差。
[0100]
步骤五:基于准刚体模型建立cmm体积误差与几何误差之间的关系。
[0101]
步骤六:采用svd变换进行平面拟合。将l-m算法求得的理论上在同一个平面的待测点的真实坐标值标拟合成一个平面。将得到的平面法向量带入公式(8),得到垂直度误差。垂直度误差s
xy
为20.4560μrad,s
xz
为39.1903μrad,s
yz
为14.6418μrad,拟合的其中一个平面如图3所示。
[0102]
步骤七:将测量点坐标,步骤四得到的体积误差,步骤六得到的垂直度误差,带入公式(10)中,在本文中x轴规划范围为(120mm,320mm,520mm,720mm,920mm,1120mm,1320mm),因此定位误差δ
x
(x)的大小为1
×
7,δ
x
(x)=[δ
x
(120mm),δ
x
(320mm),δ
x
(520mm),δ
x
(720mm),δ
x
(920mm),δ
x
(1120mm),δ
x
(1320mm)]
t
,其余几何误差均有类似的表达方式;e
xx1
的大小为1
×
7,若当前待测点x坐标为320mm,则e
xx1
=[0 1 0 0 0 0 0],其余单位矩阵表达方式与e
xx1
类似。
[0103]
步骤八:利用lasso算法对步骤七得到的线性方程组进行求解,获得关于cmm其余的18项误差,关于x轴的位移误差如图4(a)所示,x轴的角度误差如图4(b)所示关,于y轴的位移误差如图5(a)所示,y轴的角度误差如图5(b)所示,关于z轴的位移误差如图6(a)所示,z轴的位移误差如图6(b)所示。
[0104]
步骤九:将步骤八得到的体积误差及对应的测量点带入中求得区间[x
i-1
,xi)上的斜率,将求得的斜率带入公式(14)-(15)中求得不同区间斜率所占测量点斜率的权重ω1、ω2,将ω1、ω2及δ
i-1
、δi带入公式(13)求得xi处几何误差的斜率h
′i,带入公式(13)求得规划测量空间内任意点的几何误差。
[0105]
步骤十:将临近边界点区间[xi,x
i+1
)及[x
i+1
,x
i+2
)对应的斜率和计算出来,带入公式(23)中即可获得临近区域对应的斜率δ
i+3
,δ
i+2
,δ
i-1
,δ
i-2
。得到斜率后重复步骤八,即可获得规划测量空间外任意点的几何误差。利用makima算法获得的几何误差如图7至图9所示,其中关于x轴的位移误差如图7(a)所示,x轴的角度误差如图7(b)所示关,于y轴的位移误差如图8(a)所示,y轴的角度误差如图8(b)所示,关于z轴的位移误差如图9a所示,z轴的位移误差如图9(b)所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1