一种基于毫米波雷达的手势识别方法与流程
1.本发明涉及车载雷达领域,具体的是一种基于毫米波雷达的手势识别方法。
背景技术:
2.手势识别具有生动、形象、直观等特点,具有较强的视觉特点。在手势识别技术中,视觉识别技术因为受光线、天气、应用场地背景等因素的影响较大,且视频或图像等形式进行的识别很容易导致用户隐私的泄露;此外其他手势识别方案中,基于穿戴式数据传感器的方案需要与人体接触,且操作复杂、穿戴不容易,不使用于日常生活使用场景;基于超声波的方案,受传播速度和衍射影响明显,基于wi-fi等非宽带无线通信信号的方案,在手势识别时背景噪声难以去除,且分辨率低。而基于毫米波雷达方案的手势识别技术,具有非接触,不受光照、天起场地等因素的影响,可对使用者隐私进行保护,并且可保证全时段的使用。实现雨雪等恶劣天气条件或生产车间、仓库等室内光照条件不充分的限制条件下,远距离车辆控制。
技术实现要素:
3.为了克服现有技术中的缺陷,本发明实施例提供了一种基于毫米波雷达的手势识别方法,能够解决背景技术中的一个或多个问题,能够通过毫米波雷达实现对手势的远距离识别,提高。
4.本技术实施例公开了:一种基于毫米波雷达的手势识别方法,包括以下步骤:
5.s1、回波信号采集及处理,获得中频信号数据;
6.s2、提取中频信号数据,将同一帧中的数据按照chirp信号进行排列,得到若干第一信息矩阵,将同一chirp内的数据进行加窗处理和fft处理,获得目标物的距离维信息;
7.s3、对雷达采集到的二进制数据进行滤波处理得到第二信息矩阵,然后对对每一帧内的chirp进行fft处理,获得目标物的速度维信息;
8.s4、采用恒虚警检测器对速度维信息与距离维信息进行处理,得到每一帧内目标物的距离特征和速度特征;
9.s5、将每一帧得到的距离特征和速度特征进行拼接,形成距离-时间特征,速度-时间特征以及速度-距离特征,根据距离-时间特征,距离-时间特征表征目标物相对雷达的运动趋势,即探测目标的接近或远离,速度-时间特征表示目标相对雷达的运动速度,正为靠近,负为远离,距离-速度特征反应了目标速度在不同距离上的分布,以此得到目标运动轨迹来实现动作判断,进而实现手势识别;
10.s6、基于手势识别的结果对车辆进行远距离控制。
11.进一步地,还包括对毫米波雷达进行参数设置,所述参数包括调频起始频率f0,调频斜率k,发射天线开始时间t
tx-start
,空闲时间t
idle
,调频时间t
ramp
,整体线性调频周期tc,adc有效开始时间t
adc-start
,距离分辨率d
res
,最大可测量速度v
max
和速度分辨率v
res
;
12.其中,所述距离分辨率d
res
可表示为:
13.所述最大可测量速度v
max
可表示为:
14.所述速度分辨率v
res
可表示为:
15.其中:b为有效调频带宽,即采样时间内的带宽,可表示为:c为光速,λ为调频中心对应波长。
16.进一步地,所述恒虚警检测器采用ca-cfar,在检测过程中滤除大于阈值t的数据。
17.进一步地,所述有效调频带宽的带宽不小于2ghz。
18.进一步地,所述阈值t满足以下公式:
19.t=a
·
pn,
20.其中a代表阈值因子,pn代表功率噪声估计。
21.进一步地,所述参数中调频起始频率f0,调频斜率k,发射天线开始时间t
tx-start
,空闲时间t
idle
,调频时间t
ramp
,整体线性调频周期tc,adc有效开始时间t
adc-start
,距离分辨率d
res
,最大可测量速度v
max
和速度分辨率v
res
。
22.进一步地,所述阈值因子为预设值。
23.进一步地,所述阈值因子存储在学习网络中,通过学习网络不断对阈值因子进行不断的修正,提高对目标物的移动轨迹的检测精度。
24.本发明的有益效果如下:本发明涉及的基于毫米波雷达的手势识别方法,能够通过毫米波雷达捕捉目标物的运行轨迹,实现对手势的识别,可实现全天候的运动目标控制,探测距离达可达3-50米提升用户智能指引体验,节约用户时间成本,操作简单,生动、形象,可适用于多种场合。
25.为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
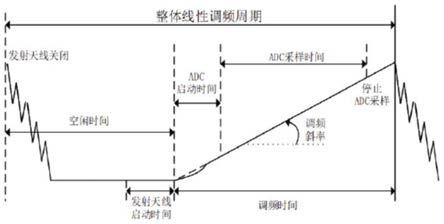
27.图1是毫米波雷达的调频周期示意图。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.在本发明一较佳实施例中的一种基于毫米波雷达的手势识别方法,包括以下步骤:
30.s1、回波信号采集及处理,获得中频信号数据;
31.s2、提取中频信号数据,将同一帧中的数据按照chirp信号进行排列,得到若干第一信息矩阵,将同一chirp内的数据进行加窗处理和fft处理,获得目标物的距离维信息;
32.s3、对雷达采集到的二进制数据进行滤波处理得到第二信息矩阵,然后对对每一帧内的chirp进行fft处理,获得目标物的速度维信息;
33.s4、采用恒虚警检测器对速度维信息与距离维信息进行处理,得到每一帧内目标物的距离特征和速度特征;
34.s5、将每一帧得到的距离特征和速度特征进行拼接,形成距离-时间特征,速度-时间特征以及速度-距离特征,根据距离-时间特征,距离-时间特征表征目标物相对雷达的运动趋势,即探测目标的接近或远离,速度-时间特征表示目标相对雷达的运动速度,正为靠近,负为远离,距离-速度特征反应了目标速度在不同距离上的分布,以此得到目标运动轨迹来实现动作判断,进而实现手势识别;
35.s6、基于手势识别的结果对车辆进行远距离控制。
36.在一个调频周期内,雷达发射的fmcw信号可以表示为:
[0037][0038]
其中,t表示一个调频周期内的快时间索引,a
t
表示发射信号振幅,fc表示载波中心频率,k表示信号调频斜率。
[0039]
由发射信号可以将目标场景反射信号表示为:
[0040][0041]
其中,ar表示接收信号振幅,δt表示信号分行时间,δt=2r/c,r表示目标相对雷达的径向距离,c表示光速,k(τ-δt)表示τ时刻接收信号频率,δfd表示多普勒频移。
[0042]
接收机将目标场景反射的回波信号与发射信号进行混频和低通滤波后得到中频信号,近似为s
if
(t)=f
lpf
{s
t
(t)sr(t)}=a
t
·ar
cos{2π[fcδt+(f
if-δfd)t]}
[0043]
其中,f
if
=kδt表示t时刻中中频信号的频率。所以,得到的中频信号的相位可以表示为φ=2π[fcδt+(f
if-δfd)t],式中的fcδt项,相对于快时间来说,为一个常量,可认为是初相。而f
if
只与调频周期内对应的快时间索引有关,由于tc很小,通常假定一个调频周期内多普勒频移δfd是恒定的,则可以通过对快时间域进行快速傅里叶变换求得到与目标距离相关的中频信号频谱分析。当不同调频周期的f
if
固定时,即距离相同时,δfd仅与调频周期之间对应的慢时间索引有关,从而在慢时间域进行快速傅里叶变换可以得到与目标速度相关的多普勒频移分布。
[0044]
在上述实施例中,还包括对毫米波雷达进行参数设置,如图1所示,所述参数包括调频起始频率f0,调频斜率k,发射天线开始时间t
tx-start
,空闲时间t
idle
,调频时间t
ramp
,整体线性调频周期tc,adc有效开始时间t
adc-start
,距离分辨率d
res
,最大可测量速度v
max
和速度分辨率v
res
;
[0045]
其中,所述距离分辨率d
res
可表示为:
[0046]
所述最大可测量速度v
max
可表示为:
[0047]
所述速度分辨率v
res
可表示为:
[0048]
其中:b为有效调频带宽,即采样时间内的带宽,可表示为:c为光速,λ为调频中心对应波长。
[0049]
在实际实施过程中,所述参数中,调频起始频率f0为77-79ghz,调频斜率k为20mhz/us,发射天线开始时间为t
tx-start
为10us,空闲时间t
idle
为20us,调频时间t
ramp
为100us,整体线性调频周期tc为130us,adc有效开始时间t
adc-start
为15us,距离分辨率d
res
为7.5cm,最大可测量速度v
max
为
±
14m/s、速度分辨率v
res
为0.068m/s。
[0050]
在上述实施例中,所述恒虚警检测器采用ca-cfar,在检测过程中滤除大于阈值t的数据。
[0051]
在上述实施例中,所述有效调频带宽的带宽不小于2ghz。在实际实施有效调频带宽的带宽的带宽越高越好,如果有效调频带宽的带宽低于2ghz,则无法满足距离分辨率的需求,对目标物的距离判断的偏差值会加大,无法实现对目标物轨迹的正确判断。
[0052]
在上述实施例中,所述阈值t满足以下公式:
[0053]
t=a
·
pn,
[0054]
其中a代表阈值因子,pn代表功率噪声估计。
[0055]
在上述实施例中,所述阈值因子存储在学习网络中,通过学习网络不断对阈值因子进行不断的修正,提高对目标物的移动轨迹的检测精度。陈然,在实际实施过程中,所述阈值因子也可以由人工根据工作环境来将其切换为预设值,预设值包括多个根据实际环境预设的点值。
[0056]
本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1