一种获取直升机非旋转坐标系下桨毂弯矩的测试方法与流程
1.本发明属于直升机强度设计领域,涉及一种获取直升机非旋转坐标系下桨毂弯矩的测试方法。
背景技术:
2.直升机桨毂弯矩载荷由飞行过程中不断旋转的旋翼轴传递至相对旋翼轴固定的直升机机体。桨毂弯矩可分为机体横向弯矩和纵向弯矩,其中桨毂弯矩测量技术较为成熟,然而机体横向弯矩和纵向弯矩难以直接测量获得,无法满足相应机体结构的强度分析需求。
3.直升机桨毂弯矩测量技术较为成熟,通常在旋翼轴上布置测试点直接获取弯矩,满足旋转坐标下旋翼系统强度分析需要。受结构形状、尺寸与测量手段影响,难以直接测量、获取直升机非旋转坐标系下桨毂弯矩。目前国内外仅采用计算方法确定直升机非旋转坐标系下桨毂弯矩,而无实测载荷。因此,急需一种适用于直升机非旋转坐标系下桨毂弯矩载荷测试及数据处理方法,用于机体结构部件强度分析工作。
技术实现要素:
4.本发明提供了一种获取直升机非旋转坐标系下桨毂弯矩的测试方法,解决了机体坐标系下桨毂弯矩测试的工程问题。该方法可以获取到机体坐标系下桨毂弯矩实测载荷。
5.本技术提供一种获取直升机非旋转坐标系下桨毂弯矩的测试方法,所述方法包括:
6.布置两个旋翼轴弯矩测量点,并在每个旋翼轴弯矩测量点上设置弯矩测量设备;
7.对所述旋翼轴弯矩测量点弯矩测试设备进行标定,获得所述旋翼轴弯矩测量点的剖面的旋翼轴弯矩与旋翼轴弯矩测量点输出数据的相关性;
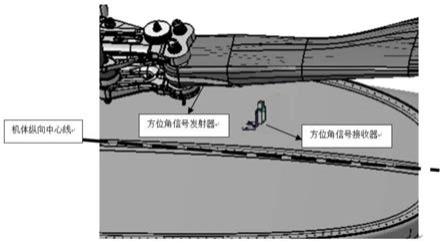
8.布置方位角信号发射器和方位角信号接收器;
9.确定方位角信号发射器与旋翼轴弯矩测量设备的安装角度θ1;确定方位角信号接收器与直升机机体纵向中心线的角度θ2;计算相位差(θ1+θ2);
10.飞行时测量并记录旋翼轴弯矩测量点输出数据和方位角信号接收器输出信号;
11.提取两个旋翼轴弯矩测量点在方位角信号接收器输出脉冲信号时的第一旋翼轴加载弯矩,以及脉冲1/4个循环前的第二旋翼轴加载弯矩;
12.根据相位差(θ1+θ2),分别对每个旋翼轴弯矩测量点的第一旋翼轴加载弯矩和第二旋翼轴加载弯矩进行分解,获得与旋翼轴弯矩测量点对应的直升机机体横向弯矩和纵向弯矩;
13.根据两个旋翼轴弯矩测量点位置,将两个旋翼轴弯矩测量点的直升机机体横向弯矩和纵向弯矩,转化为直升机非旋转坐标系下桨毂弯矩。
14.优选的,布置两个旋翼轴弯矩测量点,具体包括:
15.根据结构特征在旋翼轴上确定旋翼轴弯矩测量点位置。
16.优选的,布置方位角信号发射器和方位角信号接收器,具体包括:
17.在方位角信号发射器布置区域布置方位角信号发射器,其中,方位角信号发射器布置区域是旋转部件下表面,包括随旋翼轴旋转的主桨毂区域下表面、主桨叶根部区域下表面;
18.在方位角信号接收器区域布置方位角信号接收器,其中,方位角信号接收器区域为非旋转的直升机机体外表面。
19.优选的,确定方位角信号接收器与直升机机体纵向中心线的角度θ2,具体包括:
20.获取方位角信号接收器到旋翼轴轴线的距离l1,方位角信号接收器到直升机机体纵向中心线的垂直距离h1;根据公式sinθ2=h1/l1,计算方位角信号接收器与机体纵向中心线的夹角θ2。
21.优选的,飞行时旋翼轴弯矩测量点输出数据为时域信号,包括电压时域信号、电阻时域信号;
22.方位角信号接收器输出信号是脉冲信号,两个相邻脉冲信号之间为一次循环。
23.优选的,提取两个旋翼轴弯矩测量点在方位角信号接收器输出脉冲信号时的第一旋翼轴加载弯矩,以及脉冲1/4个循环前的第二旋翼轴加载弯矩,具体包括:
24.提取旋翼轴测量点位置a在方位角信号接收点脉冲(i)时的第一旋翼轴加载弯矩ma(i),以及旋翼轴测量点位置b在方位角信号接收点脉冲(i)时的第一旋翼轴加载弯矩mb(i);
25.提取旋翼轴测量点位置a在脉冲1/4循环(i-π/2)前的第二旋翼轴加载弯矩ma(i-π/2),以及旋翼轴测量点位置b在脉冲1/4循环(i-π/2)前的第二旋翼轴加载弯矩mb(i-π/2)。
26.优选的,根据相位差(θ1+θ2),分别对每个旋翼轴弯矩测量点的第一旋翼轴加载弯矩和第二旋翼轴加载弯矩进行分解,获得与旋翼轴弯矩测量点对应的直升机机体横向弯矩和纵向弯矩,具体包括:
27.根据以下公式,分别计算旋翼轴弯矩测量点a位置处的直升机机体横向弯矩mxai、旋翼轴弯矩测量点b位置处的直升机机体横向弯矩mxbi、旋翼轴弯矩测量点a位置处的直升机机体纵向弯矩myai、旋翼轴弯矩测量点b位置处的直升机机体纵向弯矩mybi:
28.mxai=ma(i)*cos(θ1+θ2)+ma(i-π/2)*cos(θ1+θ2-π/2)
29.mxbi=mb(i)*cos(θ1+θ2)+mb(i-π/2)*cos(θ1+θ2-π/2)
30.myai=ma(i)*sin(θ1+θ2)+ma(i-π/2)*sin(θ1+θ2-π/2)
31.mybi=mb(i)*sin(θ1+θ2)+mb(i-π/2)*sin(θ1+θ2-π/2)。
32.优选的,根据两个旋翼轴弯矩测量点位置,将两个旋翼轴弯矩测量点位置处的直升机机体横向弯矩和纵向弯矩转化为直升机非旋转坐标系下桨毂弯矩,具体包括:
33.根据公式mxoi=mxai*(1-(kx-1)*loa/(loa-lob)),计算直升机非旋转坐标系下桨毂横向弯矩mxoi;
34.根据公式myoi=myai*(1-(ky-1)*loa/(loa-lob)),计算直升机非旋转坐标系下桨毂纵向弯矩myoi;
35.其中,loa为旋翼轴弯矩测量点a位置处的剖面与桨毂中心距离、lob为旋翼轴弯矩测量点b位置处的剖面与桨毂中心距离、kx为直升机非旋转坐标系下桨毂横向弯矩mxoi的
斜率、ky为直升机非旋转坐标系下桨毂纵向弯矩myoi的斜率。
36.综上所述,本发明设计了非旋转坐标系下桨毂弯矩测试方法,通过处理旋翼轴弯矩飞行载荷数据及方位角数据,有效获取机体横向弯矩、纵向弯矩,用于机体结构强度分析工作,避免直升机强度分析时缺乏实测载荷而影响强度分析的有效性。
附图说明
37.图1为本技术提供的一种旋翼轴弯矩旋翼轴弯矩测量点位置示意图;
38.图2为本技术提供的一种方位角测试点位置示意图;
39.图3为本技术提供的一种图解法确定斜率k。
具体实施方式
40.实施例一
41.本发明的技术方案是:一种获取直升机非旋转坐标系下桨毂弯矩的测试方法,根据旋翼轴弯矩测试点时域信号以及方位角信号,确定非旋转坐标系下桨毂弯矩实测载荷。其测试步骤如下:
42.步骤101:布置两个旋翼轴弯矩测量点,并在每个旋翼轴弯矩测量点上设置弯矩测量设备;
43.具体的,根据结构特征在旋翼轴上确定旋翼轴弯矩测量点位置及弯矩测试设备。
44.步骤102:对所述旋翼轴弯矩测量点弯矩测试设备进行标定,获得所述旋翼轴弯矩测量点的剖面的旋翼轴弯矩与旋翼轴弯矩测量点输出数据的相关性;
45.对所述旋翼轴弯矩测量点弯矩测试设备进行标定的方法步骤包括应变片组桥、旋翼轴加载弯矩、测量旋翼轴弯矩测量点输出数据、计算旋翼轴加载弯矩与旋翼轴弯矩测量点输出数据的相关性。
46.其中,旋翼轴弯矩测量点输出数据是信号值,包括电压信号、电阻信号。
47.步骤103:布置方位角信号发射器和方位角信号接收器;
48.具体的,布置方位角信号发射器包括:在方位角信号发射器布置区域,布置方位角信号发射器。
49.其中,方位角信号发射器布置区域是旋转部件下表面,包括随旋翼轴旋转的主桨毂区域下表面、主桨叶根部区域下表面。
50.具体的,布置方位角信号接收器,包括:在方位角信号接收器区域,布置方位角信号接收器;
51.其中,方位角信号接收器区域为非旋转的直升机机体外表面。
52.步骤104:确定方位角信号发射器与旋翼轴弯矩测量设备的安装角度θ1;确定方位角信号接收器与直升机机体纵向中心线的角度θ2;计算相位差(θ1+θ2);
53.其中,(θ1+θ2)为旋翼轴弯矩测量设备与方位角信号接收器的相位差。
54.确定方位角信号接收器与直升机机体纵向中心线的角度θ2,具体包括:
55.获取方位角信号接收器到旋翼轴轴线的距离l1,方位角信号接收器到直升机机体纵向中心线的垂直距离h1;根据公式sinθ2=h1/l1,计算方位角信号接收器与机体纵向中心线的夹角θ2。
56.步骤105:飞行时测量并记录旋翼轴弯矩测量点输出数据和方位角信号接收器输出信号。
57.具体的,飞行时旋翼轴弯矩测量点输出数据为时域信号,包括电压时域信号、电阻时域信号,根据步骤103获得的旋翼轴加载弯矩与旋翼轴弯矩测量点输出数据的相关性,将旋翼轴弯矩测量点输出数据转化为旋翼轴加载弯矩。
58.具体的,方位角信号接收器输出信号是脉冲信号,两个相邻脉冲信号之间为一次循环。
59.步骤106:提取两个旋翼轴弯矩测量点在方位角信号接收器输出脉冲信号时的第一旋翼轴加载弯矩,以及脉冲1/4个循环前的第二旋翼轴加载弯矩。
60.具体的,a、b为两个旋翼轴测量点位置,ma(i)、mb(i)为两个旋翼轴测量点在方位角信号接收点脉冲(i)时的第一旋翼轴加载弯矩,ma(i-π/2)、mb(i-π/2)为两个旋翼轴测量点在脉冲1/4循环(i-π/2)前的第二旋翼轴加载弯矩。
61.步骤107:根据相位差(θ1+θ2),分别对每个旋翼轴弯矩测量点的第一旋翼轴加载弯矩和第二旋翼轴加载弯矩进行分解,获得与旋翼轴弯矩测量点对应的直升机机体横向弯矩和纵向弯矩。
62.具体的,
63.mxai=ma(i)*cos(θ1+θ2)+ma(i-π/2)*cos(θ1+θ2-π/2)
64.mxbi=mb(i)*cos(θ1+θ2)+mb(i-π/2)*cos(θ1+θ2-π/2)
65.myai=ma(i)*sin(θ1+θ2)+ma(i-π/2)*sin(θ1+θ2-π/2)
66.mybi=mb(i)*sin(θ1+θ2)+mb(i-π/2)*sin(θ1+θ2-π/2)
67.其中,mxai、mxbi为两个旋翼轴弯矩测量点位置处的直升机机体横向弯矩。myai、mybi为两个旋翼轴弯矩测量点位置处的直升机机体纵向弯矩。
68.步骤108:根据两个旋翼轴弯矩测量点位置,将两个旋翼轴弯矩测量点位置处的直升机机体横向弯矩和纵向弯矩转化为直升机非旋转坐标系下桨毂弯矩。
69.具体点,
70.mxoi=mxai*(1-(kx-1)*loa/(loa-lob))
71.myoi=myai*(1-(ky-1)*loa/(loa-lob))
72.其中,mxoi、myoi为直升机非旋转坐标系下桨毂横向弯矩和纵向弯矩,
73.loa、lob为两个旋翼轴弯矩测量点位置处a、b剖面与桨毂中心距离,
74.kx、ky为采用图解法获得的斜率,如图3所示。
75.实施例二
76.下面结合某型机非旋转坐标系下桨毂弯矩测试的实施例,对本发明做进一步详细说明。一种获取直升机非旋转坐标系下桨毂弯矩的测试技术,其特征在于,通过方位角信号接收器与旋转坐标下旋翼轴弯矩测量点的物理关系,将旋转坐标系下的旋翼轴弯矩测量点输出数据进行数据分解,转换为直升机非旋转坐标系下桨毂弯矩,其测试步骤如下:
77.[1]布置旋翼轴弯矩测量点,并在每个旋翼轴弯矩测量点上设置弯矩测量设备
[0078]
旋翼轴简化为悬臂梁结构,在旋翼轴上沿轴线方向选择a、b两个剖面布置测试点。见附图1。
[0079]
[2]对所述旋翼轴弯矩测量点进行载荷标定
[0080]
各旋翼轴弯矩测量点采用组桥形式进行载荷标定,获得两个测量点的剖面的旋翼轴弯矩与旋翼轴弯矩测量点输出数据的相关性。m_ij=kxv_ij,式中m表示测量点剖面弯矩,v表示对应弯矩为m时的电压信号,计算确定标定系数k。下标ij表示剖面位置。
[0081]
[3]布置方位角信号发射器和方位角信号接收器
[0082]
a)在一片桨叶根部布置方位角信号发射器,见附图2;
[0083]
b)在机体动力整流罩上安装方位角信号接收器,见附图2。
[0084]
[4]确定旋翼轴弯矩测量设备与方位角信号接收器的相位差
[0085]
a)根据旋翼轴载荷测试点位置与旋翼轴定位点的位置关系确定安装角度θ1。
[0086]
b)方位角信号接收器到旋翼轴轴线的距离为l1,方位角信号接收器到直升机机体纵向中心线的垂直距离为h1;根据公式sinθ2=h1/l1,计算方位角信号接收器与机体纵向中心线的夹角θ2。
[0087]
c)旋翼轴弯矩测量设备与方位角信号接收器相位差为(θ1+θ2)
[0088]
[5]载荷测试与数据处理
[0089]
a)在飞行过程中,测量并记录旋翼轴弯矩测量点输出数据和方位角信号接收器输出信号。其中,旋翼轴弯矩测量点输出数据为时域电压信号,方位角信号接收器输出信号为脉冲信号。
[0090]
b)根据旋翼轴弯矩测量点载荷标定系数k将旋翼轴弯矩测量点输出数据由电压值转化为加载弯矩值。
[0091]
c)提取两个旋翼轴弯矩测量点在方位角信号接收器输出脉冲信号时的旋翼轴加载弯矩,以及脉冲1/4个循环前的旋翼轴加载弯矩。其中,两个相邻脉冲信号之间为一次循环。
[0092]
ma(i)、mb(i)为两个旋翼轴测量点在方位角信号接收点脉冲(i)时的旋翼轴加载弯矩,ma(i-π/2)、mb(i-π/2)为两个旋翼轴测量点在脉冲1/4循环(i-π/2)前的旋翼轴加载弯矩。
[0093]
[6]转化旋翼轴加载弯矩
[0094]
a)将两个剖面旋翼轴加载弯矩转化为两个旋翼轴弯矩测量点位置处的直升机机体横向弯矩和纵向弯矩。
[0095]
横向弯矩
[0096]
mxai=ma(i)*cos(θ1+θ2)+ma(i-π/2)*cos(θ1+θ2-π/2)
[0097]
mxbi=mb(i)*cos(θ1+θ2)+mb(i-π/2)*cos(θ1+θ2-π/2)
[0098]
纵向弯矩
[0099]
myai=ma(i)*sin(θ1+θ2)+ma(i-π/2)*sin(θ1+θ2-π/2)
[0100]
mybi=mb(i)*sin(θ1+θ2)+mb(i-π/2)*sin(θ1+θ2-π/2)
[0101]
其中,mxai、mxbi为两个旋翼轴弯矩测量点位置处的直升机机体横向弯矩。myai、mybi为两个旋翼轴弯矩测量点位置处的直升机机体纵向弯矩。。
[0102]
b)根据mxai、mxbi,采用图解法确认斜率kx=mxbi/mxai,根据myai、mybi得到斜率ky=mybi/myai。见附图3。
[0103]
c)结合a、b剖面与桨毂中心距离loa、lob,推导出桨毂中心位置处的纵向力fxi、横向力fyi,以及横向弯矩mxi、纵向弯矩myi。
[0104]
mxoi=mxai*(1-(kx-1)*loa/(loa-lob))
[0105]
myoi=myai*(1-(ky-1)*loa/(loa-lob))
[0106]
fxi=(myai-myoi)/loa
[0107]
fyi=(mxai-mxoi)/loa
[0108]
上式中:
[0109]
mxoi、myoi为直升机非旋转坐标系下桨毂弯矩横向弯矩和纵向弯矩,
[0110]
fxi、fyi为直升机非旋转坐标系下横向力和纵向力,
[0111]
loa、lob为两个旋翼轴弯矩测量点位置处a、b剖面与桨毂中心距离,
[0112]
kx、ky为采用图解法获得的斜率。
[0113]
综上所述,本发明设计了非旋转坐标系下桨毂弯矩测试方法,通过处理旋翼轴弯矩及方位角信号数据,有效获取机体横向弯矩、纵向弯矩,用于机体结构强度分析工作,避免直升机强度分析时缺乏实测载荷而影响强度分析的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1