用于监测断路器的系统的制作方法
1.本发明涉及一种用于监测断路器的系统、一种用于监测两相或三相开关设备或控制设备的系统、一种用于监测断路器的方法、一种用于对监测断路器的神经网络进行训练的系统、以及一种用于对监测断路器的神经网络进行训练的方法。
背景技术:
2.断路器(cb)的操作机制为易于使开关设备发生故障的主子系统中的一个子系统。机制中发生的大部分机械故障模式能够通过监测行进曲线来检测,该行进曲线表示移动触头的位置。此外,行进曲线还可以揭露类似于触头烧蚀的电气故障模式。
3.现今,行进曲线监测很少用于开关设备中。
4.此外,现有解决方案具有以下缺点:
5.[1]大部分现今的行进曲线监测解决方案仅使用主轴角度的测量,并通过表示所有三个极的运动关系计算移动触头的位置。因此,其不能够在三个极的行进曲线之间区分。因此,难以标识故障位置,例如在哪一极。
[0006]
[2]在中压(mv)cb中,推杆为行进曲线的优选测量位置。因此,传感器和用于连接的所需电气组件上的要求由于cb设计在安装空间中高,并且调试非常复杂。因此,仅少数位置传感器解决方案被考虑。
[0007]
[3]行进曲线测量的所选位置传感器必须经受由于开关操作的类撞击力和减少传感器使用期限的所得冲击振动。一般来说,传感器应可靠地测量在cb使用期限期间的行进曲线。
[0008]
[1]-[3]为适用于cb中的行进曲线测量的位置传感器的特性,并且仅能够通过选择高端解决方案来减轻。此通常导致高得多的成本,从而使得永久性设备没有吸收力。
[0009]
需要解决这些问题。
技术实现要素:
[0010]
因此,具有监测断路器的改进技术将是有利的。
[0011]
本发明的目标是通过独立权利要求的主题来解决,其中另外实施例并入附属权利要求中。
[0012]
在第一方面中,提供一种用于监测断路器的系统。系统包括:
[0013]-至少一个传感器;以及
[0014]-处理单元。
[0015]
至少一个传感器被配置为被定位和利用来获得可操作的断路器的主轴的至少一个传感器数据。至少一个传感器被配置为将可操作的断路器的主轴的至少一个传感器数据提供给处理单元。处理单元被配置为确定可操作的断路器的可移动触头的位置和/或速度信息,其中确定包括通过由处理单元实现的经训练的神经网络对可操作的断路器的主轴的至少一个传感器数据的分析。
[0016]
在示例中,神经网络是基于校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据来训练。
[0017]
在示例中,校准断路器的主轴的至少一个传感器数据是在与校准断路器的可移动触头和/或推杆的至少一个传感器数据相同的时间获取。
[0018]
在示例中,校准断路器与可操作的断路器是相同的类型或模型。
[0019]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器是相同的类型或模型。
[0020]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器被定位在与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器相同或等同的至少一个位置处。
[0021]
在示例中,被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器包括以下一个或多个:加速度传感器;主轴角度传感器。
[0022]
在示例中,被利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据的至少一个传感器包括以下一个或多个:位置传感器;速度传感器。
[0023]
在示例中,可移动触头的位置信息和/或速度信息包括行进曲线。
[0024]
在示例中,系统包括输出单元,该输出单元被配置为输出可移动触头的位置信息和/或速度信息。
[0025]
在示例中,处理单元被配置为确定断路器是否具有故障,其中该确定包括可移动触头的位置信息和/或速度信息的分析。
[0026]
在第二方面中,提供一种用于监测两相或三相开关设备或控制设备的系统。系统包括两个或三个根据第一方面的系统,一个用于两相或三相中的每相的断路器。
[0027]
在第三方面中,提供一种用于监测断路器的方法,该方法包括:
[0028]
a)利用至少一个传感器,该至少一个传感器被定位来获得可操作的断路器的主轴的至少一个传感器数据;
[0029]
b)将可操作的断路器的主轴的至少一个传感器数据提供给处理单元;以及
[0030]
c)由处理单元确定可操作的断路器的可移动触头的位置和/或速度信息,其中该确定包括通过由处理单元实现的经训练的神经网络分析可操作的断路器的主轴的至少一个传感器数据。
[0031]
在第四方面中,提供一种用于对监测断路器的神经网络进行训练的系统,该系统包括:
[0032]-至少一个第一传感器;
[0033]-至少一个第二传感器;以及
[0034]-处理单元。
[0035]
至少一个第一传感器被配置为被定位和利用来获得校准断路器的主轴的至少一个传感器数据。至少一个第一传感器被配置为将校准断路器的主轴的至少一个传感器数据提供给处理单元。至少一个第二传感器被配置为被定位和利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据。至少一个第二传感器被配置为将校准断路器的可移动触头和/或推杆的至少一个传感器数据提供给处理单元。处理单元被配置为训练神经
网络。神经网络的训练包括利用校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据。经训练的神经网络被配置为基于对可操作的断路器的主轴的至少一个传感器数据的分析来确定可操作的断路器的可移动触头的位置和/或速度信息。
[0036]
在第五方面中,提供一种用于对监测断路器的神经网络进行训练的方法,该方法包括:
[0037]
a1)利用至少一个第一传感器,该至少一个第一传感器被定位来获得校准断路器的主轴的至少一个传感器数据;
[0038]
b1)提供校准断路器的主轴的至少一个传感器数据给处理单元;
[0039]
c1)利用至少一个第二传感器,该至少一个第二传感器被定位来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据;
[0040]
d1)提供校准断路器的可移动触头和/或推杆的至少一个传感器数据给处理单元;以及
[0041]
e1)由处理单元训练神经网络,其中神经网络的训练包括利用校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据,并且其中经训练的神经网络被配置为基于对可操作的断路器的主轴的至少一个传感器数据的分析来确定可操作的断路器的可移动触头的位置和/或速度信息。
[0042]
以上方面和示例将自下文描述的实施例变得显而易见,并且参考下文描述的实施例来阐述。
附图说明
[0043]
下文将参考以下图式来描述示例性实施例:
[0044]
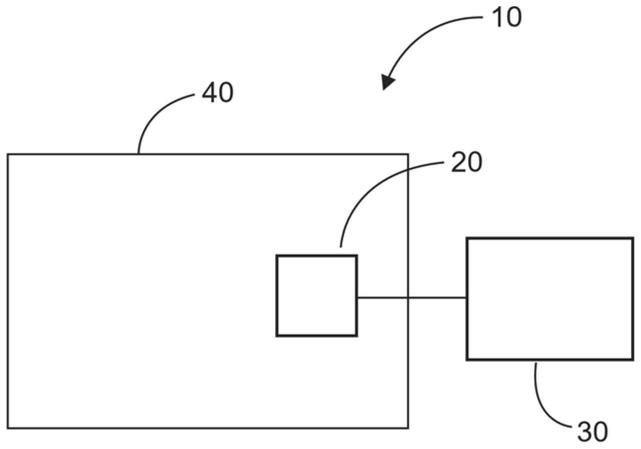
图1示出了用于监测断路器的示例性系统的示意性表示;
[0045]
图2示出了用于监测两相或三相开关设备或控制设备的示例性系统的示意性表示;
[0046]
图3示出了用于监测断路器的方法;
[0047]
图4示出了用于对监测断路器的神经网络进行训练的示例性系统的示意性表示;
[0048]
图5示出了用于对监测断路器的神经网络进行训练的方法;以及
[0049]
图6示出了用于神经网络的训练的工作流程。
具体实施方式
[0050]
图1示出了用于监测断路器的系统10的示例。系统包括至少一个传感器20和处理单元30。至少一个传感器被配置为被定位和利用来获得可操作的断路器40的主轴的至少一个传感器数据。至少一个传感器被配置为将可操作的断路器的主轴的至少一个传感器数据提供给处理单元。处理单元被配置为确定可操作的断路器的可移动触头的位置和/或速度信息。确定包括通过由处理单元实现的经训练的神经网络对可操作的断路器的主轴的至少一个传感器数据的分析。
[0051]
根据示例,神经网络是基于校准断路器50的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据来训练。
[0052]
根据示例,校准断路器的主轴的至少一个传感器数据是在与校准断路器的可移动触头和/或推杆的至少一个传感器数据相同的时间获取。
[0053]
根据示例,校准断路器与可操作的断路器是相同的类型或模型。
[0054]
根据示例,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器20、60与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器20是相同的类型或模型。
[0055]
根据示例,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器被定位在与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器相同或等同的至少一个位置处。
[0056]
根据示例,被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器包括以下一个或多个:加速度传感器;主轴角度传感器。
[0057]
根据示例,被利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据的至少一个传感器70包括以下一个或多个:位置传感器;速度传感器。
[0058]
根据示例,可移动触头的位置信息和/或速度信息包括行进曲线。
[0059]
根据示例,系统包括输出单元,该输出单元被配置为输出可移动触头的位置信息和/或速度信息。
[0060]
根据示例,处理单元被配置为确定断路器是否具有故障。该确定包括对可移动触头的位置信息和/或速度信息的分析。
[0061]
图2示出了用于监测两相或三相开关设备或控制设备的系统100的示例。系统包括如上文关于图1描述的两个或三个系统10,其中系统10中针对两相或三相中的每相的断路器有一个系统。
[0062]
图3示出了用于在其基本步骤中监测断路器的方法200。方法包括:
[0063]
在利用步骤210中,也称为步骤a),利用至少一个传感器,该至少一个传感器被定位来获得可操作的断路器的主轴的至少一个传感器数据;
[0064]
在提供步骤220中,也称为步骤b),提供可操作的断路器的主轴的至少一个传感器数据给处理单元;以及
[0065]
在确定步骤230中,也称为步骤c),由处理单元确定可操作的断路器的可移动触头的位置和/或速度信息,其中该确定包括通过由处理单元实现的经训练的神经网络分析可操作的断路器的主轴的至少一个传感器数据。
[0066]
在示例中,神经网络是基于校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据来训练。
[0067]
在示例中,校准断路器的主轴的至少一个传感器数据是在与校准断路器的可移动触头和/或推杆的至少一个传感器数据相同的时间获取。
[0068]
在示例中,校准断路器与可操作的断路器是相同的类型或模型。
[0069]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器是相同的类型或模型。
[0070]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个传感器被定位在与被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个
传感器相同或等同的至少一个位置处。
[0071]
在示例中,被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器包括以下一个或多个:加速度传感器;主轴角度传感器。
[0072]
在示例中,被利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据的至少一个传感器包括以下一个或多个:位置传感器;速度传感器。
[0073]
在示例中,可移动触头的位置信息和/或速度信息包括行进曲线。
[0074]
在示例中,系统包括输出单元,并且方法包括输出可移动触头的位置信息和/或速度信息。
[0075]
在示例中,方法包括由处理单元确定断路器是否具有故障,其中该确定包括分析可移动触头的位置信息和/或速度信息。
[0076]
图4示出了用于对监测断路器的神经网络进行训练的系统300的示例。系统包括至少一个第一传感器20、60,至少一个第二传感器70以及处理单元30、80。至少一个第一传感器被配置为被定位和利用来获得校准断路器50的主轴的至少一个传感器数据。至少一个第一传感器被配置为将校准断路器的主轴的至少一个传感器数据提供给处理单元。至少一个第二传感器被配置为被定位和利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据。至少一个第二传感器被配置为将校准断路器的可移动触头和/或推杆的至少一个传感器数据提供给处理单元。处理单元被配置为训练神经网络。神经网络的训练包括利用校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据。经训练的神经网络被配置为基于对可操作的断路器的主轴的至少一个传感器数据的分析来确定可操作的断路器40的可移动触头的位置和/或速度信息。
[0077]
在示例中,校准断路器的主轴的至少一个传感器数据是在与校准断路器的可移动触头和/或推杆的至少一个传感器数据相同的时间获取。
[0078]
在示例中,校准断路器与可操作的断路器是相同的类型或模型。
[0079]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器(20、60)与将被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器(20)是相同的类型或模型。
[0080]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器被定位在与将被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器相同或等同的至少一个位置处。
[0081]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器包括以下一个或多个:加速度传感器;主轴角度传感器。
[0082]
在示例中,被利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据的至少一个第二传感器(70)包括以下一个或多个:位置传感器;速度传感器。
[0083]
在示例中,可移动触头的位置信息和/或速度信息包括行进曲线。
[0084]
图5示出了用于在其基本步骤中对监测断路器的神经网络进行训练的方法400。方法包括:
[0085]
在利用步骤410中,也称为步骤a1),利用至少一个第一传感器,该至少一个第一传感器被定位来获得校准断路器的主轴的至少一个传感器数据;
[0086]
在提供步骤420中,也称为步骤b1),提供校准断路器的主轴的至少一个传感器数
据给处理单元;
[0087]
在利用步骤430中,也称为步骤c1),利用至少一个第二传感器,该至少一个第二传感器被定位来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据;
[0088]
在提供步骤440中,也称为步骤d1),提供校准断路器的可移动触头和/或推杆的至少一个传感器数据给处理单元;以及
[0089]
在训练步骤450中,也称为步骤e1),由处理单元训练神经网络。神经网络的训练包括利用校准断路器的主轴的至少一个传感器数据和校准断路器的可移动触头和/或推杆的至少一个传感器数据。经训练的神经网络被配置为基于对可操作的断路器的主轴的至少一个传感器数据的分析来确定可操作的断路器的可移动触头的位置和/或速度信息。
[0090]
在示例中,方法包括在与校准断路器的可移动触头和/或推杆的至少一个传感器数据相同的时间获取校准断路器的主轴的至少一个传感器数据。
[0091]
在示例中,校准断路器与可操作的断路器是相同的类型或模型。
[0092]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器(20、60)与将被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器(20)是相同的类型或模型。
[0093]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器被定位在与将被利用来获得可操作的断路器的主轴的至少一个传感器数据的至少一个传感器相同或等同的至少一个位置处。
[0094]
在示例中,被利用来获得校准断路器的主轴的至少一个传感器数据的至少一个第一传感器包括以下一个或多个:加速度传感器;主轴角度传感器。
[0095]
在示例中,被利用来获得校准断路器的可移动触头和/或推杆的至少一个传感器数据的至少一个第二传感器(70)包括以下一个或多个:位置传感器;速度传感器。
[0096]
在示例中,可移动触头的位置信息和/或速度信息包括行进曲线。
[0097]
现参考图6在具体细节中描述用于监测断路器的系统、用于监测两相或三相开关设备或控制设备的系统、用于监测断路器的方法、用于对监测断路器的神经网络进行训练的系统以及用于对监测断路器的神经网络进行训练的方法。
[0098]
断路器(cb)的操作机制的状态监测和诊断主要基于行进曲线测量。原因在于大部分故障模式能够由测量行进曲线的位置或速度传感器捕获。然而,由于其需要满足cb的安装空间和使用期限的需求的耐用可靠的传感器,因此获取此数据难以实现。
[0099]
发明人意识到,更合适并且能够更易于安装在cb中的诸如加速度计等其他类型的传感器能够以完全不同的方式和新方式利用以得到此行进曲线信息。发明人已应用用于从此其他传感器数据(例如加速度计)提取针对每个极的移动触头的位置的人工智能(ai)的方法,并且因此基于行进曲线实现cb驱动监测。除机械故障外,所产生行进曲线还能够用于监测关于实例触头烧蚀的电气故障模式。
[0100]
解决方案涉及使用序列到序列人工智能(ai)模型,该模型首先学习通过使用样本对其进行训练从其他传感器数据产生行进曲线数据,该样本含有行进曲线和其他传感器测量(例如加速度计)、用于测量主轴角度的旋转编码器等。
[0101]
随后,模型能够提取还关于未用于训练模型的数据且在行进曲线信息不可用时的行进曲线信息。通过两种方式评估此方法的准确度:
[0102]
1.使用未用于训练模型的数据且使用所有样本(例如使用所有样本平均的平方误差)将所产生行进曲线与实际行进曲线进行比较。
[0103]
2.通过计算描述对于健康诊断重要且从科学文献已知的行进曲线的特性的特征,且将使用所产生行进曲线计算的特征与使用实际行进曲线计算的特征进行比较,使用未用于训练模型的数据。
[0104]
因此,解决方案利用具有行进曲线信号和其他传感器数据的数据集,该行进曲线信号和其他传感器数据同时自同一设备记录。接着使用人工智能(ai)模型用于学习自其他传感器数据(其与行进曲线信号同时获取)产生行进曲线,其能够为加速度计信号、主轴的角度测量等。
[0105]
随后,模型用于提取还关于未用于训练模型的数据且在行进曲线信息不可用时的行进曲线信息。因此,行进曲线数据能够仅针对诸如来自加速度计的“其他传感器数据”产生,其能够针对如用于产生神经网络模型的相同类型或模型的新断路器更方便放置和使用。
[0106]
因此,在训练模型之后,模型能够用于仅使用来自传感器的测量数据来诊断断路器驱动的健康。
[0107]
图6提供上述技术的概述工作流程。
[0108]
尽管本发明已在图式和前述描述中详细地说明和描述,但此说明和描述被视为说明性的或示例性的而非限制性的。本发明不限于所公开实施例。根据图式、公开内容和随附权利要求书的学习,能够由所属领域的技术人员实践所要求本发明来理解和实行所公开实施例的其他变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1