一种光电瞄准系统多光轴一致性检测方法与流程
1.本发明涉及一种光电瞄准系统多光轴一致性检测方法。
背景技术:
2.机载光电瞄准系统是一种集瞄准、跟踪、测量、成像为一体的光电设备,可同时搭载不同类型光学传感器,对目标物体的几何、物理特性进行感知及识别,进而实现对目标物体的瞄准和跟踪。
3.一般光电瞄准系统为了适应全天候的观测,多会携带红外热像仪、电视观瞄具及激光测距机等不同类型的光学载荷,进而形成多传感器、多谱段及多光路融合的光电设备系统。光电瞄准系统多光轴平行度即光轴一致性为极其重要的一项指标参数,只有确保各传感器光轴一致性在一定范围之内,才能保证光电设备跟踪、瞄准及测距的一致性,保证输出目标各参数信息的准确性。
4.目前对光电瞄准系统多光轴一致性检测主要采用大口径平行光管法。大口径平行光管法是将不同传感器的光轴同时瞄准相同的无穷远靶板,靶板处于光轴的视场中心即与探测器十字重合可认为各光轴平行。该方法无法精确量化靶板与探测器十字的重合程度,一般都是靠人眼主观判读,存在估值误差,此外由于各传感器视场不同,观测相同靶板时,靶板成像大小不一,加之靶板自身形状误差,会加大光轴一致性主观判读的难度。
技术实现要素:
5.为解决传统采用大口径平行光管法进行光电瞄准系统多光轴一致性检测时,主观判度难度大、无法给出定量偏差的技术问题,本发明提供一种光电瞄准系统多光轴一致性检测方法。
6.本发明的技术方案是:
7.一种光电瞄准系统多光轴一致性检测方法,其特殊之处在于,包括以下步骤:
8.第一步:将光电瞄准系统中的激光测距机、电视观瞄具和红外热像仪安装在同一个光轴调试工装上,将光轴调试工装固定于二维数显转台上,使激光测距机、电视观瞄具和红外热像仪均进入平行光管的口径,并将它们与相应的检测仪相连;
9.第二步:获取红外热像仪的光轴与电视观瞄具的光轴之间的偏差
10.步骤1.利用红外热像仪和电视观瞄具观瞄红外-电视圆孔靶板;
11.步骤2.利用红外热像仪和电视观瞄具的检测仪获取红外-电视圆孔靶板的图像;
12.步骤3.获取红外圆斑中心与红外热像仪十字中心的偏差;
13.3.1获取红外圆斑中心坐标(x1,y1);
14.3.1.1读取红外热像仪的检测仪的输出图像,对读取的图像进行灰度处理,将全彩图转化为二值化灰度图;
15.3.1.2去除二值化灰度图中像素数小于设定值a的小目标区域,得到大区域靶标圆单元;
16.3.1.3对步骤3.1.2得到的大区域靶标圆单元进行缝隙填充且平滑边界,求出圆区域面积及质心,进行圆形度量值判定,标记靶标图形圆心,得到红外圆斑中心坐标(x1,y1);
17.3.2计算红外圆斑中心坐标(x1,y1)与红外热像仪十字中心的偏差;
18.已知红外热像仪的探测器尺寸为2m1×
2n1,则红外热像仪的探测器十字中心坐标为(m1,n1),红外热像仪的探测器单像素视场角度为θ1,则红外圆斑中心与红外热像仪探测器的十字中心的偏差为(x1θ
1-m1θ1,y1θ
1-n1θ1);
19.步骤4.获取电视圆斑中心与电视观瞄具十字中心的偏差;
20.4.1采用与步骤3.1相同的方法获取电视圆斑中心坐标(x2,y2);
21.4.2计算电视圆斑中心坐标(x2,y2)与电视观瞄具十字中心的偏差
22.已知电视观瞄具的探测器尺寸为2m2×
2n2,则电视观瞄具的探测器十字中心坐标为(m2,n2),电视观瞄具的探测器单像素视场角度为θ2,则电视圆斑中心与电视观瞄具的十字中心偏差为(x2θ
2-m2θ2,y2θ
2-n2θ2);
23.步骤5.计算红外热像仪的光轴与电视观瞄具的光轴之间的偏差;
24.基于步骤3.2和4.2的计算结果,可得红外热像仪光轴与电视观瞄具光轴的一致性偏差为((x1θ
1-m1θ
1-x2θ2+m2θ2)2+(y1θ
1-n1θ
1-y2θ
2-+n2θ2)2)
1/2
;
25.第三步:获取红外热像仪的光轴与激光测距机的光轴之间的偏差
26.步骤1.利用红外热像仪和激光测距机观瞄红外-激光靶板;
27.步骤2.利用红外热像仪的检测仪获取红外-激光靶板的图像;
28.步骤3.获取激光发射光斑中心与红外热像仪十字中心的偏差
29.3.1采用与第二步中步骤3.1相同的方法获取激光发射光斑中心坐标(x3,y3);
30.3.2计算激光发射光斑中心坐标(x3,y3)与红外热像仪十字中心的偏差;
31.已知红外热像仪的探测器尺寸为2m1×
2n1,则红外热像仪的探测器十字中心坐标为(m1,n1),红外热像仪的探测器单像素视场角度为θ1,则激光发射光斑中心与红外热像仪十字中心的偏差为(x3θ
1-m1θ1,y3θ
1-n1θ1);
32.步骤4.计算红外热像仪的光轴与激光测距机的光轴之间的偏差;
33.基于第三步中步骤3.2的计算结果,可得红外热像仪的光轴与激光测距机的光轴的一致性偏差为((x3θ
1-m1θ1)2+(y3θ
1-n1θ1)2)
1/2
;
34.上述第二步和第三步可互换顺序。
35.进一步地,第二步中步骤3涉及的图像处理采用matlab数据处理软件实现。
36.进一步地,第二步中步骤3.1.2中所述的设定值a为50。
37.进一步地,第二步中步骤1具体为:将大口径平行光管的靶板设置为红外-电视圆孔靶板,给红外热像仪和电视观瞄具上电,通过红外热像仪和电视观瞄具的检测仪调焦至观测红外-电视圆孔靶板清晰,调整二维数显转台的方位和俯仰角度,使得红外热像仪和电视观瞄具的十字中心均与红外-电视圆孔靶板有重叠,然后将二维数显转台锁止。
38.进一步地,第三步中步骤1具体为:将大口径平行光管的靶板设置为红外-激光靶板,给红外热像仪和激光测距机上电,在激光测距机前方架设衰减片,调整激光测距机使红外热像仪十字与激光发射光斑中心有重叠。
39.本发明的优点是:
40.本发明基于大口径平行光管校准技术,利用红外热像仪和电视观瞄具对圆孔靶标
观测,实时获取全幅图像信息并输出,对输出图像进行圆形及质心检测处理,得出圆孔靶标的质心坐标,计算质心坐标与光轴十字坐标的相对位置进而得出红外-电视光轴一致性偏差数值。红外-激光光轴一致性偏差可通过改变靶板,利用红外热像仪直接观测激光发射光斑,实时获取全幅图像信息并输出,采用相同的图像处理方法获得红外-激光光轴一致性偏差数值。本发明的方法操作简单,计算过程利用计算机数据处理软件实现,可直接且准确得到多光轴一致性偏差数值,检测精度低至0.1"。
附图说明
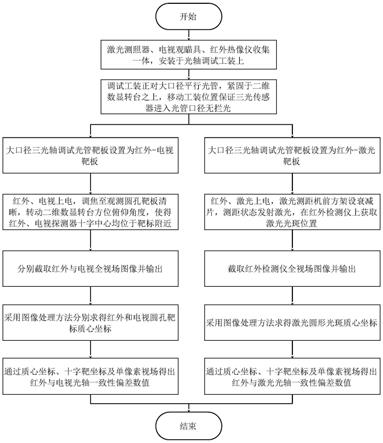
41.图1为本发明多光轴一致性检测的方法流程图。
42.图2为大口径平行光管光轴检测原理图示意图。
43.图3为红外热像仪十字与靶标偏差示意图。
44.图4为电视观瞄具十字与靶标偏差示意图。
45.图5为红外十字与激光发射光斑偏差示意图。
具体实施方式
46.以下结合附图对本发明作进一步说明。
47.如图1所示,本发明的光电瞄准系统多光轴一致性检测方法,具体实施流程如下:
48.第一步:将光电瞄准系统中的各光学载荷安装在同一个光轴调试工装上,并使各光学载荷均进入平行光管的口径
49.1.制作光轴调试工装
50.如图1所示,光轴调试工装包括竖向支座、下夹持件和上夹持件;下夹持件的一端与竖向支座固定连接,上夹持座的一端通过设置在竖向支座上的竖向导轨可滑动地安装在竖向支座上;下夹持件和上夹持件的另一端用于共同支撑夹持光学载荷;通过调整上夹持件的上下位置,可调整上夹持件和下夹持件之间的距离。
51.2.将光学载荷安装在光轴调试工装上
52.参照图2,将激光测距机、电视观瞄具、红外热像仪组件收集一体,安装于光轴调试工装上,保证激光测距机、电视观瞄具和红外热像仪的物镜均正对大口径平行光管,并将激光测距机和电视观瞄具与电视-激光检测仪相连,将红外热像仪与红外检测仪相连。
53.3.调整光轴调试工装相对于平行光管的位置
54.将光轴调试工装紧固于二维数显转台上,移动光轴调试工装的位置保证激光测距机、电视观瞄具和红外热像仪均进入平行光管口径且无拦光。
55.第二步:获取红外热像仪的光轴与电视观瞄具的光轴之间的偏差
56.步骤1.利用红外热像仪和电视观瞄具观瞄红外-电视圆孔靶板
57.将大口径平行光管的靶板设置为红外-电视圆孔靶板,给红外热像仪和电视观瞄具上电,通过红外检测仪和电视-激光检测仪调焦至观测红外-电视圆孔靶板清晰,调整二维数显转台的方位和俯仰角度,使得红外热像仪和电视观瞄具的十字中心均位于红外-电视圆孔靶板附近,即使得红外热像仪和电视观瞄具的十字中心均与红外-电视圆孔靶板有重叠,然后将二维数显转台锁止。
58.步骤2.利用红外检测仪和电视-激光检测仪获取红外-电视圆孔靶板的图像
59.通过红外检测仪和电视-激光检测仪获取红外-电视圆孔靶板的红外与电视波段全视场图像信息,并进行全幅图像截取输出。
60.步骤3.获取红外圆斑中心与红外热像仪十字中心的偏差
61.3.1获取红外圆斑中心坐标(x1,y1);
62.3.1.1读取红外检测仪的输出图像,对读取的图像进行灰度处理,将全彩图转化为二值化灰度图;
63.3.1.2去除二值化灰度图中像素数小于50的小目标区域,得到大区域靶标圆单元;
64.3.1.3对步骤3.1.2得到的大区域靶标圆单元进行缝隙填充且平滑边界,求出圆区域面积及质心,进行圆形度量值判定,标记靶标图形圆心,得出靶标图形圆心坐标值(x1,y1),即红外圆斑中心坐标。
65.3.2计算红外圆斑中心坐标(x1,y1)与红外热像仪十字中心的偏差;
66.已知红外热像仪的探测器尺寸为2m1×
2n1,即红外热像仪的全幅输出图像尺寸为2m1×
2n1,则红外热像仪的探测器十字中心坐标为(m1,n1),红外热像仪的探测器单像素视场角度为θ1,则如附图3所示,红外圆斑中心与红外热像仪探测器的十字中心的偏差为(x1θ
1-m1θ1,y1θ
1-n1θ1)。
67.步骤4.获取电视圆斑中心与电视观瞄具十字中心的偏差;
68.4.1获取电视圆斑中心坐标(x2,y2);
69.4.1.1读取电视观瞄具的输出图像,对读取的图像进行灰度处理,将全彩图转化为二值化灰度图;
70.4.1.2去除二值化灰度图中像素数小于50的小目标区域,得到大区域靶标圆单元;
71.4.1.3对步骤4.1.2得到的大区域靶标圆单元进行缝隙填充且平滑边界,求出圆区域面积及质心,进行圆形度量值判定,标记靶标图形圆心,得出靶标图形圆心坐标值(x2,y2),即电视圆斑中心坐标。
72.4.2计算电视圆斑中心坐标(x2,y2)与电视观瞄具十字中心的偏差
73.已知电视观瞄具的探测器尺寸为2m2×
2n2,即电视观瞄具的全幅输出图像尺寸为2m2×
2n2,则电视观瞄具的探测器十字中心坐标为(m2,n2),电视观瞄具的探测器单像素视场角度为θ2,则如附图4所示,电视圆斑中心与电视观瞄具的十字中心偏差为(x2θ
2-m2θ2,y2θ
2-n2θ2)。
74.步骤5.计算红外热像仪的光轴与电视观瞄具的光轴之间的偏差
75.基于步骤3.2和4.2的计算结果,可直接计算得出红外热像仪光轴与电视观瞄具光轴的一致性偏差为((x1θ
1-m1θ
1-x2θ2+m2θ2)2+(y1θ
1-n1θ
1-y2θ
2-+n2θ2)2)
1/2
。
76.第三步:获取红外热像仪的光轴与激光测距机的光轴之间的偏差
77.步骤1.利用红外热像仪和激光测距机观瞄红外-激光靶板
78.将大口径平行光管的靶板设置为红外-激光靶板,给红外热像仪和激光测距机上电,在激光测距机前方架设衰减片,调整激光测距机使红外热像仪十字与激光发射光斑中心有重叠。
79.步骤2.利用红外检测仪获取红外-激光靶板的图像
80.激光测距机发射激光照射红外-激光靶板,通过红外检测仪获取激光测距机的激光光斑位置及红外波段全视场图像信息,并进行幅图像截取输出。
81.步骤3.获取激光发射光斑中心与红外热像仪十字中心的偏差
82.3.1获取激光发射光斑中心坐标(x3,y3);
83.3.1.1读取红外热像仪的输出图像,对读取图像的进行灰度处理,将全彩图转化为二值化灰度图;
84.3.1.2去除二值化灰度图中像素数小50的小目标区域,得到大区域激光圆形光斑单元;
85.3.1.3对步骤3.1.2得到的大区域激光圆形光斑单元进行缝隙填充且平滑边界,求出激光圆形光斑区域面积及质心,进行圆形度量值判定,标记激光光斑圆心,得出激光光斑图形圆心坐标值(x3,y3),即激光发射光斑中心坐标。
86.3.2计算激光发射光斑中心坐标(x3,y3)与红外热像仪十字中心的偏差;
87.已知红外热像仪的探测器尺寸为2m1×
2n1,即红外热像仪的全幅输出图像为2m1×
2n1,则红外热像仪的探测器十字中心坐标为(m1,n1),红外热像仪的探测器单像素视场角度为θ1,则如附图5所示,激光发射光斑中心与红外热像仪十字中心的偏差为(x3θ
1-m1θ1,y3θ
1-n1θ1)。
88.步骤4.计算红外热像仪的光轴与激光测距机的光轴之间的偏差
89.基于步骤3.2的计算结果,可直接计算得出红外热像仪的光轴与激光测距机的光轴的一致性偏差为((x3θ
1-m1θ1)2+(y3θ
1-n1θ1)2)
1/2
。
90.上述步骤中的图像处理均可采用matlab数据处理软件运算实现。
91.综上所述,经上述步骤,可以得到红外热像仪的光轴与电视观瞄具的光轴之间、以及红外热像仪的光轴与激光测距机的光轴之间的偏差,实现光电瞄准系统中红外热像仪、电视观瞄具、激光测距机三光轴的一致性检测。
92.需要说明的是,上述第二步和第三步的顺序可互换,即也可以先获取红外像仪的光轴与激光测距机的光轴之间的偏差,再获取红外热像仪的光轴与电视观瞄具的光轴之间的偏差。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1